

换道行为是驾驶过程中一项基本且不可或缺的操作,涉及车辆在二维空间中的动态交互. 该行为需要同时调整横向和纵向的速度与位移,显著增加了车辆之间的交互作用,对道路交通安全会产生重要影响. 统计数据显示[1],换道行为风险已成为影响道路交通安全不可忽视的高频风险类型.
随着智能交通的快速发展,换道行为的准确预测已成为提升道路安全的关键技术. 在车联网领域,车辆可以实时共享换道意图,优化群体决策并减少冲突风险;而在自动驾驶领域,自动驾驶车辆可以实时评估环境并预测周围车辆的换道决策,从而提前做出响应,能够提升自动驾驶的安全水平[2]. 目前对于换道预测的研究多关注换道车辆驾驶风格而忽略周围车辆风格,无法反映真实环境中车辆之间的相互影响. 此外,对于影响换道行为的因素考虑不全面,如交通流参数、货车比例、车辆长度等因素对换道行为的影响机制没有被充分探究.
本研究首先针对现有模型未能有效建模多车驾驶风格与交互关系的问题,提出结合换道车辆及周围车辆驾驶风格识别的方法,以更真实地刻画换道过程中的博弈机制;其次,针对换道预测外部影响因素考虑不足的局限,引入车辆长度、货车比例及交通流密度等参数,提升模型对复杂交通环境的适应性;最后,针对深度学习模型在多车交互建模中的不足,分别采用长短时记忆网络与双层卷积神经网络,对比2种网络模型在不同时间窗口下的预测性能,并解释不同参数对换道行为预测的影响机制. 本研究旨在构建一个更加全面、精细且可解释性更强的换道行为预测框架,为自动驾驶车辆的安全决策与智能交通管理提供方法支持与实践参考.
1. 换道预测模型与评价指标
1.1. 换道预测模型
考虑到面向未来复杂交通场景下的车辆换道预测研究,所选用的模型须满足高维数据输入、训练及计算方便快速的要求,故选用擅长处理复杂数据关系和高维数据的长短时记忆网络(long short-term memory,LSTM)、双层卷积神经网络(double layer convolutional neural network,2-CNN)建立换道预测模型.
1.1.1. 长短时记忆网络(LSTM)
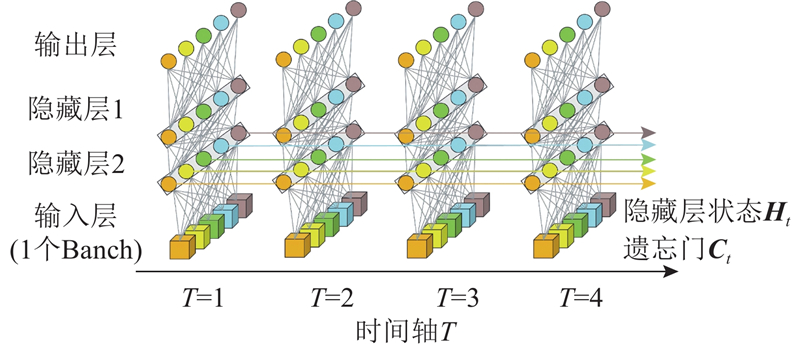
LSTM是一种改进的循环神经网络架构,如图1所示,其引入“门控机制”和“细胞状态”设计,提升了模型对时间序列中远距离关联信息的记忆与建模能力,在换道行为预测中得到了广泛应用. 细胞状态作为一条贯穿时间步的通道,负责在序列传递过程中存储和更新长期记忆,能有效缓解传统循环神经网络的梯度衰减问题. 遗忘门、输入门以及输出门则通过可学习的门控单元动态调控信息的流动,决定需要被保留、遗忘或输出的信息.
图 1
1.1.2. 双层卷积神经网络(2-CNN)
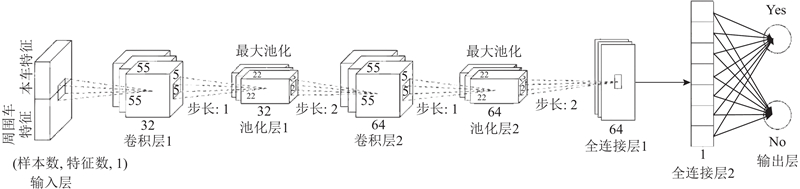
2-CNN是在标准的CNN基础上扩展而来的,如图2所示,通过连续的2层卷积来增强网络的特征提取能力. 与单层相比,其局部特征提取能力强,能够有效捕捉数据中更细致的局部特征,在多车交互关系的建模上表现更优. 在输入处理上,换道车辆和周围车辆的所有特征被拼接成一个一维向量并标准化,每一行数据代表一个样本. 当输入到模型时,数据被重塑为(样本数,特征数,1)的形状,即每个特征作为一维信号的一个通道按顺序串行输入网络. 在网络结构上,第1卷积层使用大小为5、步长为1的卷积核在整个特征序列上滑动,能够同时覆盖换道车辆及周围车辆的多种组合特征,从而学习其局部交互模式. 池化层在此基础上进行降维,保留关键信息. 第2卷积层则在第1层输出的特征图上进一步提取更高阶特征,挖掘特征间的复杂关系. 随后经全连接层融合和分类,完成换道行为预测.
图 2
总体来说,LSTM善于应对时间序列数据,通过门控机制和细胞状态捕捉时序依赖关系,擅长建模长距离上下文信息;2-CNN则较擅长面向空间数据,利用卷积核提取局部空间特征,通过池化增强平移不变性,计算高度并行化. LSTM强调时序动态,2-CNN聚焦局部关联,分别代表了循环结构与卷积结构在时序与空间维度上的核心优势,均广泛应用于交通运输的各个领域.
1.2. 窗口时间的选取
在换道预测研究中,窗口时间指的是从换道行为起始点开始向前设定的时间区间,在此区间捕捉车辆在换道前的一系列动态轨迹行为,是驾驶风格划分的数据基础. 过短的窗口可能导致信息丢失,而过长的窗口则可能引入不相关的历史数据,降低预测效果. 有研究发现[7],窗口时间长度在1.0~5.0 s范围内能减少数据冗余,提升预测速度,具备更强的捕捉换道行为关键特征的性能.
图 3
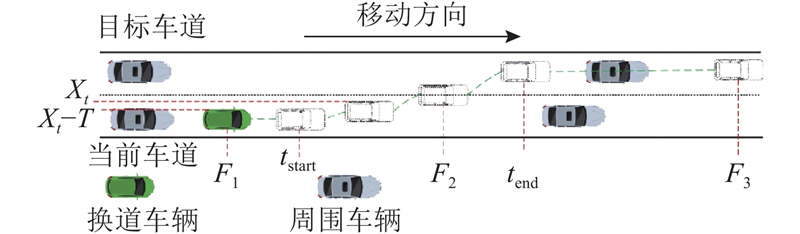
图 3 换道起点确定示意图
Fig.3 Schematic diagram for determining starting point of lane-changing behavior
对于未换道车辆,随机选择一个起点,并从该起点向前依次寻找1.0、1.5、2.0、2.5、3.0、3.5、4.0、4.5、5.0 s的窗口时间. 具体操作如下:随机选择起点,首先检查5.0 s的窗口时间. 如果该窗口时间的数据完整,则可选取该窗口,并同时允许更短的窗口时间(如1.0~4.5 s)供后续使用. 若5.0 s的窗口不完整,则依次检查较短的窗口时间,直到找到一个完整的窗口,并提取该窗口数据做进一步分析.
1.3. 评价指标
在评估换道行为预测模型的有效性时,使用准确率Acc、精确率P、召回率R和F1值作为评价指标. 这些指标基于二分类问题的混淆矩阵进行计算,其具体定义如表1所示.
表 1 混淆矩阵分类
Tab.1
| 实际行为 | 识别结果 | |
| 真实行为 | 其他行为 | |
| 真实行为 | TP(真正例) | FN(假负例) |
| 其他行为 | FP(假正例) | TN(真负例) |
精确率、召回率、准确率、F1值的表达式如下:
1.4. SHAP方法
SHAP(SHapley Additive exPlanations)是用于解释机器学习模型预测结果的先进方法. 由于复杂机器学习模型的预测结果通常缺乏透明性和可解释性,SHAP通过量化各特征对预测结果的边际贡献,提供了一种公平且一致的解释框架,使得对模型预测结果的解读更加清晰明确. 对于给定的模型f和特征集N,第i个特征的Shapley值定义为
式中:N为所有特征的集合;|S|为子集S中的特征数量;|N|为特征集N中的特征总数;f(S)为仅使用子集S中的特征时,模型的预测输出.
2. 数据来源与处理
2.1. HighD 数据集
HighD 数据集[19]是通过无人机在晴朗无风的天气条件下从鸟瞰视角拍摄的. 数据集包含60段视频,涵盖超过11万条车辆轨迹. 视频采集频率为25 Hz,记录的车型包括小汽车和货车,其中货车的比例高达23%.
该数据集详细标注了车辆的类别、行驶方向、速度、加速度、车道位置等关键信息. 本研究选取编号为15~24的地点5的数据(双向四车道),仅关注单次换道车辆,共
图 4
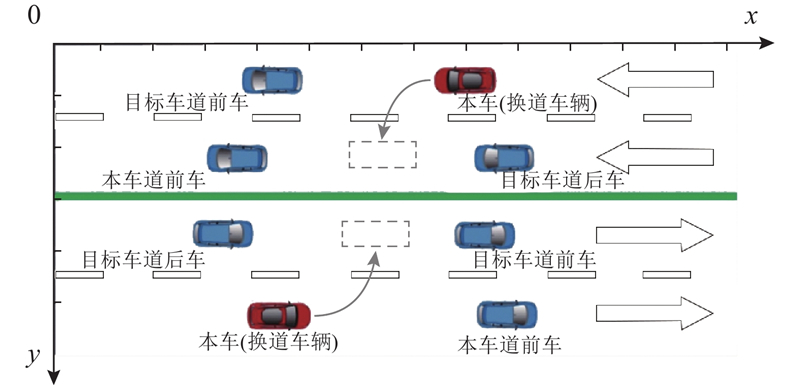
图 4 换道车辆与周围车辆位置关系
Fig.4 Position relationship between target vehicle and surrounding vehicles
2.2. 特征值的选取
本研究共构建4类基础特征:1)换道车辆特征,包括车辆在x和y方向的位置、速度和加速度(编号1~6);2)换道车辆与前车的交互特征,包括两车在x和y方向的距离差、速度差和加速度差(编号7~12);3)换道车辆与目标车道前车的交互特征,包括x和y方向距离差、速度差和加速度差(编号13~18);4)换道车辆与目标车道后车的交互特征,包括x和y方向距离差、速度差和加速度差(编号为19~24). 共计24个特征,其中位置、速度、加速度的单位分别为m、m/s、m/s2.
为了描述换道前车辆轨迹的波动性,并比较不同时间窗口的预测性能,在1.0~5.0 s的时间窗口内(步长为0.5 s),对上述24个特征计算5类统计量:平均值、标准偏差、变异系数、平均绝对偏差和四分位数变异系数,由此得到120个统计变量. 其中编号1~24对应平均值,25~48对应标准偏差,49~72对应变异系数,73~96对应平均绝对偏差,97~120对应四分位数变异系数.
此外,考虑到车辆的换道行为受车辆属性和交通流状态的影响,新增了车长信息(换道车辆、前车、目标车道前车和后车,编号为121~124,单位为m);交通流密度(编号为125,单位为veh/km,)和货车比例(编号为126). 在此基础上,根据全部126个特征变量评定计算换道车辆、换道车辆前车、目标车道前车和目标车道后车的驾驶风格,编号为127~130.
3. 结果分析
3.1. 未考虑驾驶风格特征的换道行为预测
3.1.1. 参数设置
提取换道车辆和未换道车辆在不同窗口期内的1~126号特征变量,分别使用LSTM和2-CNN模型来预测车辆换道行为.
LSTM模型利用126个特征变量作为输入进行预测. 2-CNN模型采用分层处理的方式,第1层考虑换道车辆及周围车辆的统计值及车长信息、交通流信息和货车占比;第2层提取更高阶的特征,这样的设计有助于更准确地捕捉车辆间的相互作用.
模型参数设置为如下:隐藏层神经元数量(N)为8,训练轮数(epoch)为100,批量大小(batch size)为32,学习率为0.001.
3.1.2. 结果分析
在不考虑驾驶风格的条件下,对比LSTM和2-CNN模型在不同时间窗口下的表现,结果显示2-CNN在绝大多数时间窗口上均略优于LSTM,尤其在短时间窗口上表现更为突出,结果如表2所示. 其中,T为窗口时间.
表 2 不考虑驾驶风格的LSTM和2-CNN模型预测结果
Tab.2
| T/s | Acc/% | P/% | R/% | F1/% | |||||||
| LSTM | 2-CNN | LSTM | 2-CNN | LSTM | 2-CNN | LSTM | 2-CNN | ||||
| 1.0 | 98.81 | 99.21 | 98.21 | 99.50 | 96.07 | 96.71 | 97.13 | 98.09 | |||
| 1.5 | 98.92 | 99.06 | 97.15 | 97.15 | 97.85 | 98.58 | 97.50 | 97.86 | |||
| 2.0 | 98.60 | 98.64 | 96.69 | 96.17 | 96.17 | 96.93 | 96.42 | 96.55 | |||
| 2.5 | 98.62 | 98.40 | 96.46 | 97.54 | 95.88 | 93.47 | 96.16 | 95.46 | |||
| 3.0 | 98.26 | 98.62 | 94.33 | 95.31 | 94.33 | 95.70 | 94.32 | 95.50 | |||
| 3.5 | 98.11 | 98.52 | 93.66 | 94.98 | 92.91 | 94.53 | 93.28 | 94.75 | |||
| 4.0 | 98.55 | 98.47 | 93.68 | 95.06 | 95.98 | 93.82 | 94.82 | 94.43 | |||
| 4.5 | 98.10 | 98.42 | 96.63 | 98.22 | 88.88 | 89.83 | 92.58 | 93.84 | |||
| 5.0 | 98.45 | 98.91 | 94.09 | 97.50 | 91.61 | 92.37 | 92.82 | 94.86 | |||
2-CNN在1.0、1.5 s的窗口时间上取得了较高的准确率、召回率和F1值,这些指标反映了模型的稳定性和对换道行为的精确预测能力. 特别是在1.0 s窗口时间下,2-CNN的精确率和F1值分别达到了99.50%和98.09%,优于LSTM模型的98.21%和97.13%. 这表明2-CNN在短时间窗口内更具优势,在换道行为预测中具有较强的适应性.
总体来看,2种模型均在较短时间窗口上更有利于捕捉换道行为. 而随着窗口时间的延长,无论是LSTM还是2-CNN,其预测准确性均出现下降,进一步说明长时间窗口可能引入了干扰因素,削弱了模型对换道行为的捕捉能力.
3.2. 考虑驾驶风格的换道行为预测
为了考虑换道车辆及周围车辆驾驶风格对换道行为的影响,通过K-means聚类的方法并使用主成分分析与单因素方差分析的方法对主要特征变量降维,以提取换道车辆和周围车辆的驾驶风格,将其作为换道行为预测的输入变量,提高预测的准确性.
首先,对换道车辆与非换道车辆的24个基础特征值进行斯皮尔曼相关性分析,结果如图5所示. 其中,
图 5
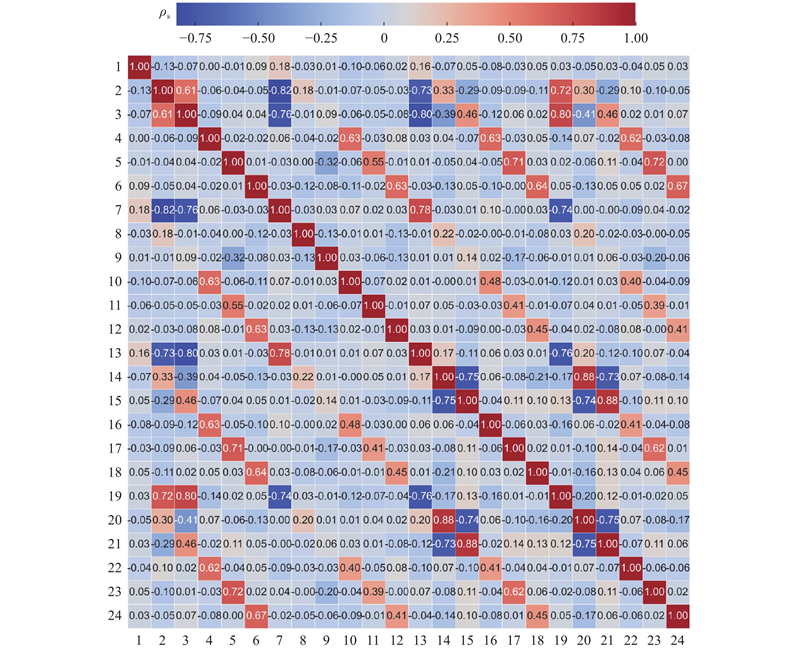
图 5 24个特征变量的斯皮尔曼相关性分析热力图
Fig.5 Spearman correlation analysis heatmap of 24 characteristic variables
图 6
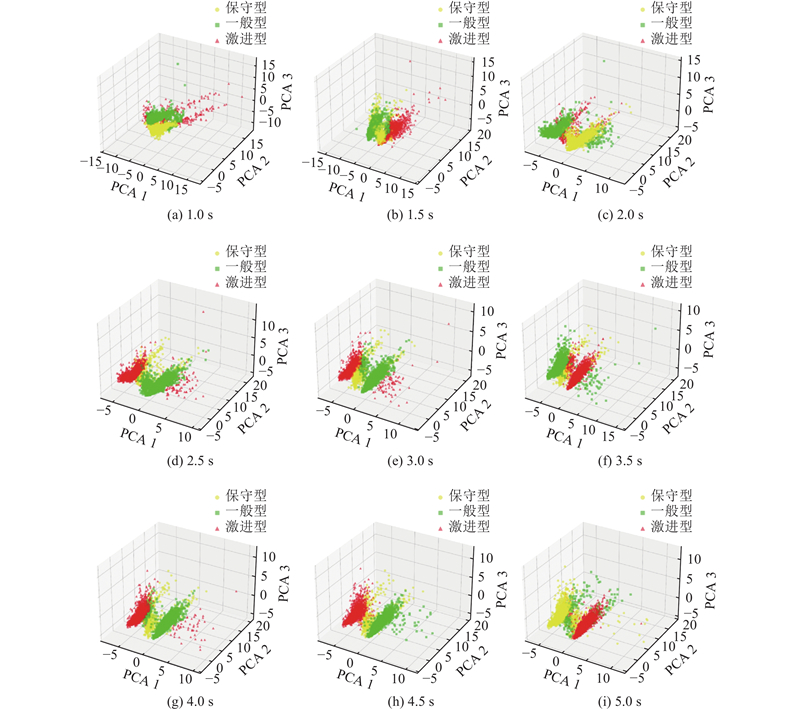
图 6 不同时间窗口的驾驶风格聚类结果
Fig.6 Clustering results of driving styles in different time windows
为了验证聚类结果的有效性,采用轮廓系数(silhouette score)、Calinski-Harabasz指数和Davies-Bouldin指数[20]对不同窗口时间下聚类结果的有效性进行量化分析.
如表3所示为不同窗口时间下驾驶风格聚类有效性评价指标. 可以看出,所有窗口时间下的轮廓系数均大于0.5,Calinski-Harabasz指数均高于2 000,Davies-Bouldin指数均小于1,均满足聚类有效性的常用标准,说明聚类结果具有较好的分群效果. 整体来看,本研究采用的PCA+K-means方法能够有效区分不同驾驶风格,聚类分组具有较高的可信度和实际意义.
表 3 不同窗口时间下驾驶风格聚类有效性评价指标
Tab.3
| T/s | 轮廓系数 | Calinski-Harabasz值 | Davies-Bouldin值 |
| 1.0 | 0.540 | 2 249.709 | 0.861 |
| 1.5 | 0.544 | 2 273.568 | 0.851 |
| 2.0 | 0.591 | 2 659.616 | 0.781 |
| 2.5 | 0.596 | 2 696.060 | 0.786 |
| 3.0 | 0.595 | 2 672.858 | 0.793 |
| 3.5 | 0.591 | 2 605.592 | 0.814 |
| 4.0 | 0.588 | 2 538.292 | 0.817 |
| 4.5 | 0.584 | 2 488.884 | 0.837 |
| 5.0 | 0.580 | 2 444.602 | 0.852 |
将聚类结果作为模型输入,包括换道车辆驾驶风格、前车驾驶风格、目标车道前车驾驶风格以及目标车道后车驾驶风格. 此时数据集的特征变量增加至115个.
为了筛选出与是否发生换道行为具有统计学显著关联的特征变量,本研究采用单因素方差分析(one-factor analysis of variance,ANOVA)的方法计算F值和P值,判断某个特征是否对分类结果有显著影响,排除无关或噪声特征,以优化模型结构,提升预测准确性,同时增强模型解释力. 在给定显著性水平α=0.05下,当概率P<0.05时则认为该特征变量对于是否发生换道行为的影响显著. 对1.0~5.0 s的9个时间窗口选取对换道结果具有显著影响的特征变量,最终每个窗口时间选取的特征变量个数分别为64、71、66、74、73、71、69、66、68个. 其中,以2.0 s的窗口时间为例,符合要求的特征变量如图7所示. 按显著性由强到弱对具有显著特征变量的编号进行排序,即横轴从左到右编号对应的F值依次降低.
图 7
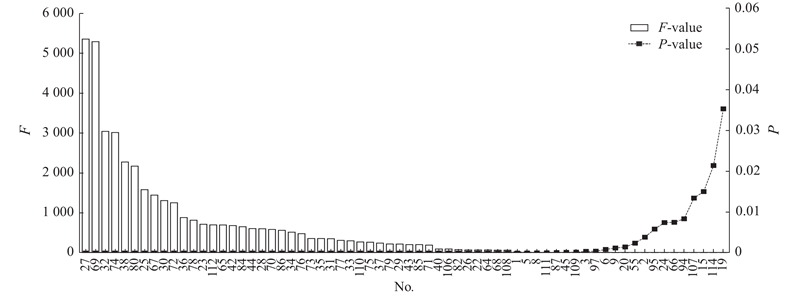
图 7 2.0 s窗口时间下特征变量经ANOVA检验的F值和P值
Fig.7 F-values and P-values of feature variables tested by ANOVA under 2.0-second window time
表 4 考虑驾驶风格的LSTM模型的最优超参数设置
Tab.4
| 超参数 | 描述 | 取值 |
| activation | 激活函数 | relu |
| alpha | L2正则化参数 | 0.01 |
| batch_size | 每次更新模型权重时所使用的样本数 | 16 |
| hidden_layer_sizes | 隐藏层的结构配置 | (100, 50) |
| learning_rate_init | 初始学习率 | 0.001 |
表 5 考虑驾驶风格的2-CNN模型的最优超参数设置
Tab.5
| 超参数 | 描述 | 取值 |
| filters | 卷积核数量 | 32 |
| kernel_size | 卷积核大小 | 5 |
| dense_units | 全连接层中神经元数量 | 64 |
| learning_rate | 学习率 | 0.001 |
3.3. 考虑驾驶风格特征的结果分析
在考虑驾驶风格的条件下,LSTM和2-CNN模型在不同时间窗口下均比不考虑驾驶风格时有更高的准确率、精确率、召回率和F1值,如表6所示. 1)在1.0~2.0 s窗口时间下,LSTM的F1值均高于2-CNN. 特别是在2.0 s的窗口时间,LSTM预测效果最优,F1值达99.26%. 2)随着窗口时间增长,LSTM保持稳定性能优势,其F1值始终高于98.50%. 尤其在3.5 s窗口,LSTM精确率为99.78%,在所有窗口时间中达到最高,体现了对复杂驾驶行为的分辨能力. 相比之下,2-CNN性能呈现加速衰减趋势,F1值从2.5 s的96.48%降至4.0 s的90.40%,凸显了其在连续行为建模中的结构局限性. 3)在5.0 s窗口时间,LSTM表现出衰减的可控性但仍保持F1值为91.72%,其准确率与召回率显著优于2-CNN. 而2-CNN在5.0 s窗口出现指标矛盾现象:准确率回升至全数据次高值98.11%,但召回率与F1值未同步恢复,反映其长时预测存在误判积累风险.
表 6 考虑驾驶风格的LSTM和2-CNN模型预测结果
Tab.6
| T/s | Acc/% | P/% | R/% | F1/% | |||||||
| LSTM | 2-CNN | LSTM | 2-CNN | LSTM | 2-CNN | LSTM | 2-CNN | ||||
| 1.0 | 99.03 | 97.72 | 95.95 | 96.33 | 97.83 | 89.27 | 96.88 | 92.68 | |||
| 1.5 | 99.36 | 98.35 | 98.75 | 97.28 | 97.59 | 96.42 | 98.17 | 96.85 | |||
| 2.0 | 99.74 | 98.27 | 98.96 | 97.14 | 99.57 | 95.84 | 99.26 | 96.48 | |||
| 2.5 | 99.73 | 98.95 | 98.90 | 96.46 | 99.57 | 96.50 | 99.23 | 96.48 | |||
| 3.0 | 99.54 | 98.03 | 98.58 | 94.37 | 98.83 | 95.11 | 98.71 | 94.74 | |||
| 3.5 | 99.56 | 97.59 | 99.78 | 92.77 | 97.34 | 91.11 | 98.54 | 91.93 | |||
| 4.0 | 99.52 | 97.47 | 98.11 | 93.73 | 97.50 | 87.31 | 97.80 | 90.40 | |||
| 4.5 | 99.37 | 97.50 | 99.04 | 95.25 | 95.26 | 82.60 | 97.11 | 88.34 | |||
| 5.0 | 98.59 | 98.11 | 92.25 | 94.35 | 91.23 | 87.24 | 91.72 | 90.64 | |||
总体来说,LSTM模型在各个窗口时间下的F1值均高于2-CNN模型的,反映出LSTM模型在处理时间序列模型上能力较强,也揭示了LSTM通过门控机制能有效捕获驾驶行为的时序关联性;在短于2.0 s的窗口时间,特征维度不足会导致模型判别边界模糊;当窗口时间长于2.0 s时,冗余时序信息可能引发注意力漂移,构成性能衰减边界条件.
合理选择最佳时间窗口(2.0 s)对于实际应用具有重要价值,不仅能够提升换道预测的准确率,还能兼顾系统的实时性和响应速度,从而更好地满足智能驾驶等实际场景对预测性能的需求,为智能驾驶辅助系统等实际场景提供更为科学合理的参数设置,提升换道行为预测的可靠性和效率.
3.4. 模型性能提升
如图8所示为考虑驾驶风格前、后,LSTM与2-CNN模型的F1值性能提升. 可以看出,在各个窗口时间下,考虑驾驶风格后的LSTM模型,其F1值基本均有提升且最大提升出现在3.5 s的窗口时间,提升了5.64%. 这说明驾驶风格会显著影响驾驶行为. 通过引入换道车辆与周围车辆的驾驶风格,LSTM模型能够建立个性化的特征映射关系,使模型对不同风格的驾驶行为产生更强的模式识别能力,也恰巧匹配LSTM模型善于处理时间序列数据的特点.
图 8
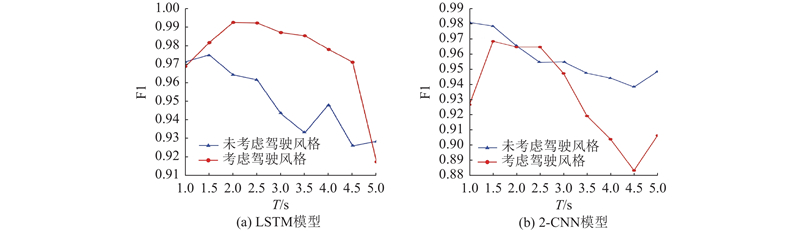
图 8 考虑驾驶风格前、后的LSTM与2-CNN模型F1值性能对比
Fig.8 Comparison of F1-score performance of LSTM and 2-CNN models with driving style versus without driving style
对于2-CNN模型,考虑驾驶风格后,在多个窗口时间下的F1值均出现减少,在4.5 s的窗口时间,下降幅度最大,达5.86%,这说明考虑驾驶风格反而不适用于空间序列处理的模型. 并且,该模型在1.0 s和4.0~5.0 s的窗口时间下的降幅都较大,表明时间窗口过短,可能无法捕捉到驾驶风格的完整动态特征,导致模型在特征提取时信息不足,从而影响分类性能;时间窗口过长,可能导致特征冗余和噪声积累,使得模型在处理复杂时间序列时表现不佳. 这可能是由于模型结构本身不适合处理类别型或全局抽象特征,因此,2-CNN模型在处理时间序列数据时,可能无法有效捕捉驾驶风格的动态变化,相比之下,时间序列模型可能更适合处理此类数据.
本研究用t检验法,检验考虑驾驶风格与未考虑驾驶风格2种情况下的F1值差异,以判断该差异在预测准确性上是否具有统计显著性. 如表7所示,两者的p-value都小于0.05,这说明LSTM和2-CNN模型在考虑驾驶风格与未考虑驾驶风格的情况下,均表现出显著的性能差异. 因此,是否考虑驾驶风格对2个模型的性能具有显著的影响.
表 7 LSTM与2-CNN模型的t检验结果
Tab.7
| 模型 | t-statistic | p-value |
| LSTM | − | |
| 2-CNN |
3.5. 基于SHAP的影响因素分析
对每个窗口期内所有特征的SHAP值进行汇总与可视化,生成特征重要性图(见图9),直观地展示了整体模型中影响力最大的前20个特征,并按影响力从高到低依次排列. 其中,纵坐标代表特征变量序号,红色说明该特征的取值较大,蓝色说明该特征的取值较小,横坐标的SHAP值表示该特征对换道预测结果的影响程度与正负方向. 通过比较每个时间窗口期的SHAP值分析结果可以看出,本研究新增的特征变量,包括127(换道车辆的驾驶风格)、130(目标车道后车的驾驶风格)、123(目标车道前车长度)、126(货车在车流中的比例)、125(交通流的密度)、128(前车驾驶风格)、122(前车车长)等这些特征变量的影响排名较前,说明新增的特征变量对换道行为预测的影响较大,将其引入有助于提升模型预测的准确性.
图 9
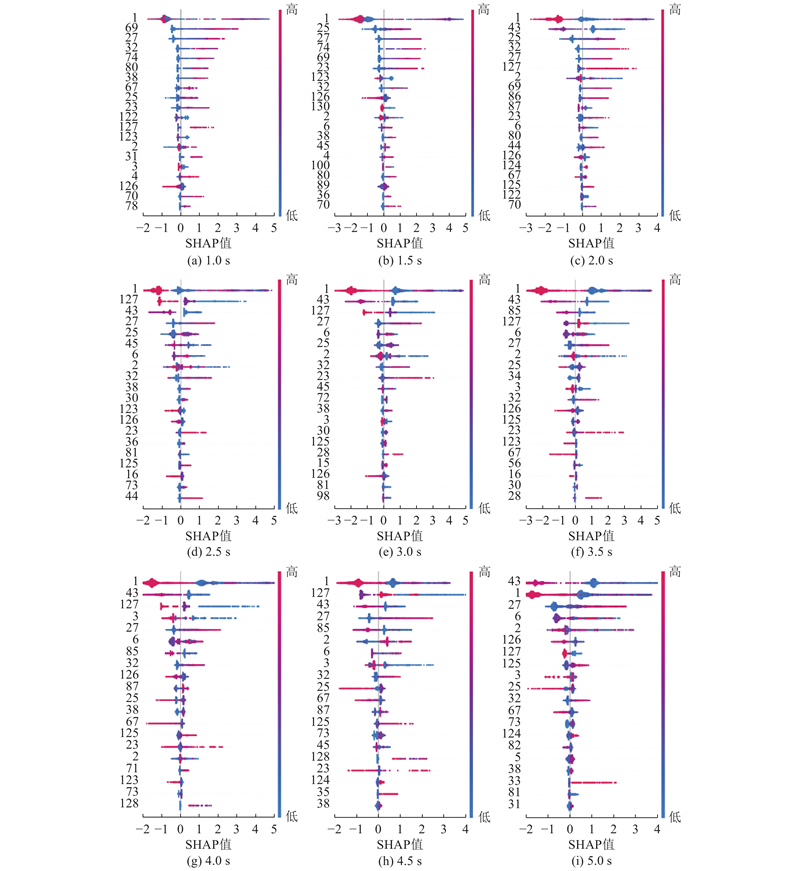
图 9 不同窗口时间下SHAP值与单个特征变量的关系
Fig.9 Relationship between SHAP value and individual feature variable at different window times
如表8所示为各窗口期前20个高贡献特征中车辆长度、交通流及驾驶风格特征的影响排名. 可以看出,虽然在不同时间窗下,特征变量对换道行为预测模型的贡献度和排名存在一定的差异,但是,不同时间窗口下,127(换道车辆驾驶风格)展现出较为突出的影响力,在大多数窗口期内均位列特征重要性前20名,新增的125(交通流密度)和126(货车比例)这些因素同样表现出较高的重要性,较多地出现在前20个高贡献特征中. 相对而言,121~124(各个位置车辆长度)及128~130(周围车辆驾驶风格)的贡献度较低.
表 8 各窗口期前20个高贡献特征中车辆长度、交通流及驾驶风格特征的影响排名
Tab.8
| No. | T/s | ||||||||
| 1.0 | 1.5 | 2.0 | 2.5 | 3.0 | 3.5 | 4.0 | 4.5 | 5.0 | |
| 121 | — | — | — | — | — | — | — | — | — |
| 122 | 11 | — | 19 | — | — | — | — | — | — |
| 123 | 13 | 7 | — | 12 | — | 15 | 18 | — | — |
| 124 | — | — | 16 | — | — | — | — | 18 | 14 |
| 125 | — | — | 18 | 17 | 15 | 13 | 14 | 13 | 8 |
| 126 | 18 | 9 | 15 | 13 | 18 | 12 | 9 | — | 6 |
| 127 | 12 | — | 6 | 2 | 3 | 4 | 3 | 2 | 7 |
| 128 | — | — | — | — | — | — | 20 | 16 | — |
| 129 | — | — | — | — | — | — | — | — | — |
| 130 | — | 10 | — | — | — | — | — | — | — |
如表9所示,列举了在2.0 s时间窗口下对换道行为预测模型影响最大的特征变量及其SHAP贡献度,用以分析最优窗口时间下传统变量与新增特征变量对预测结果的贡献程度. 其中,Rank表示贡献度排名,
表 9 2.0 s窗口时间下前20个贡献度最高的特征值
Tab.9
| Rank | No. | Co/% | Rank | No. | Co/% | |||
| 1 | 1 | 1.279 | 19.38 | 11 | 23 | 0.159 | 2.41 | |
| 2 | 43 | 0.941 | 14.26 | 12 | 6 | 0.159 | 2.41 | |
| 3 | 25 | 0.624 | 9.46 | 13 | 80 | 0.143 | 2.17 | |
| 4 | 32 | 0.383 | 5.82 | 14 | 44 | 0.141 | 2.14 | |
| 5 | 27 | 0.310 | 4.70 | 15 | 126 | 0.122 | 1.86 | |
| 6 | 127 | 0.287 | 4.36 | 16 | 124 | 0.119 | 1.81 | |
| 7 | 2 | 0.236 | 3.59 | 17 | 67 | 0.092 | 1.39 | |
| 8 | 69 | 0.221 | 3.36 | 18 | 125 | 0.073 | 1.11 | |
| 9 | 86 | 0.179 | 2.72 | 19 | 122 | 0.072 | 1.10 | |
| 10 | 87 | 0.169 | 2.56 | 20 | 70 | 0.066 | 1.00 |
4. 结 论
本研究提出考虑周围车辆驾驶风格的换道决策建模方法,主要的结论有如下2点.
(1)考虑周围车辆的行驶数据的统计值用于表征其不同的驾驶风格,使用PCA+K-means的方法量化驾驶风格;新引入车辆长度、交通流密度、货车占比和考虑车辆交互特征的换道车辆驾驶风格作为预测模型的输入且其联合贡献率达11.08%.
(2)最佳方案是使用2.0 s的窗口时间并采用结合周围车辆驾驶风格特征的LSTM模型,其预测换道行为的F1值最优,达到99.26%. 该方案相对于不考虑驾驶风格提升了5.64%,相对于考虑驾驶风格的2-CNN模型(F1值为96.48%)也有较大的提升.
未来可以分析2-CNN模型在预测中出现的不增反降的现象. 同时,为了提升模型的鲁棒性和实际应用能力,计划增加训练数据的多样性,涵盖不同道路类型、交通密度和驾驶风格,将有助于提升模型在实际复杂交通环境下的泛化能力. 上述未来工作将有助于研究成果的推广,以及提高模型对实际复杂场景的预测能力,以更好地支持智能交通管理,提升道路安全与交通效率,促进智能交通技术的应用.
参考文献
Identifying dynamic interaction patterns in mandatory and discretionary lane changes using graph structure
[J].DOI:10.1111/mice.13099 [本文引用: 1]
Shareable driving style learning and analysis with a hierarchical latent model
[J].DOI:10.1109/TITS.2024.3374771 [本文引用: 1]
Effect of personality traits on driving style: psychometric adaption of the multidimensional driving style inventory in a Chinese sample
[J].DOI:10.1371/journal.pone.0202126 [本文引用: 1]
Modeling the impact of driving aggression on lane change performance measures: steering compensatory behavior, lane change execution duration and crash probability
[J].DOI:10.1016/j.trf.2024.05.001 [本文引用: 1]
Early lane change prediction for automated driving systems using multi-task attention-based convolutional neural networks
[J].DOI:10.1109/TIV.2022.3161785 [本文引用: 2]
Recognition of lane-changing behaviour with machine learning methods at freeway off-ramps
[J].DOI:10.1016/j.physa.2020.125691 [本文引用: 2]
Predicting highway lane-changing maneuvers: a benchmark analysis of machine and ensemble learning algorithms
[J].DOI:10.1016/j.physa.2023.128471 [本文引用: 1]
An integrated lane change prediction model incorporating traffic context based on trajectory data
[J].DOI:10.1016/j.trc.2022.103738 [本文引用: 1]
An evaluation of the impact of truck-lane restriction strategies on traffic operation characteristics
[J].DOI:10.1007/s41062-025-01928-9 [本文引用: 1]
Do heavy vehicles always have a negative effect on traffic flow?
[J].DOI:10.3390/app11125520 [本文引用: 1]
General lane-changing model MOBIL for car-following models
[J].
Modeling integrated lane-changing behavior
[J].
Analysis of Chinese typical lane change behavior in car–truck heterogeneous traffic flow from UAV view
[J].DOI:10.3390/electronics11091398 [本文引用: 2]
Driving style tendency quantification method based on short-term lane change feature extraction
[J].DOI:10.3390/su17083563 [本文引用: 1]
A proactive crash risk prediction framework for lane-changing behavior incorporating individual driving styles
[J].
Instantaneous lane-changing type aware lane change prediction based on LSTM in mixed traffic scenario
[J].DOI:10.1142/S0218126622501808 [本文引用: 1]
Analyzing differences of highway lane-changing behavior using vehicle trajectory data
[J].DOI:10.1016/j.physa.2023.128980 [本文引用: 1]
An extensive comparative study of cluster validity indices
[J].DOI:10.1016/j.patcog.2012.07.021 [本文引用: 1]
Random search for hyper-parameter optimization
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}