| 计算机技术 |
|

|
|
|
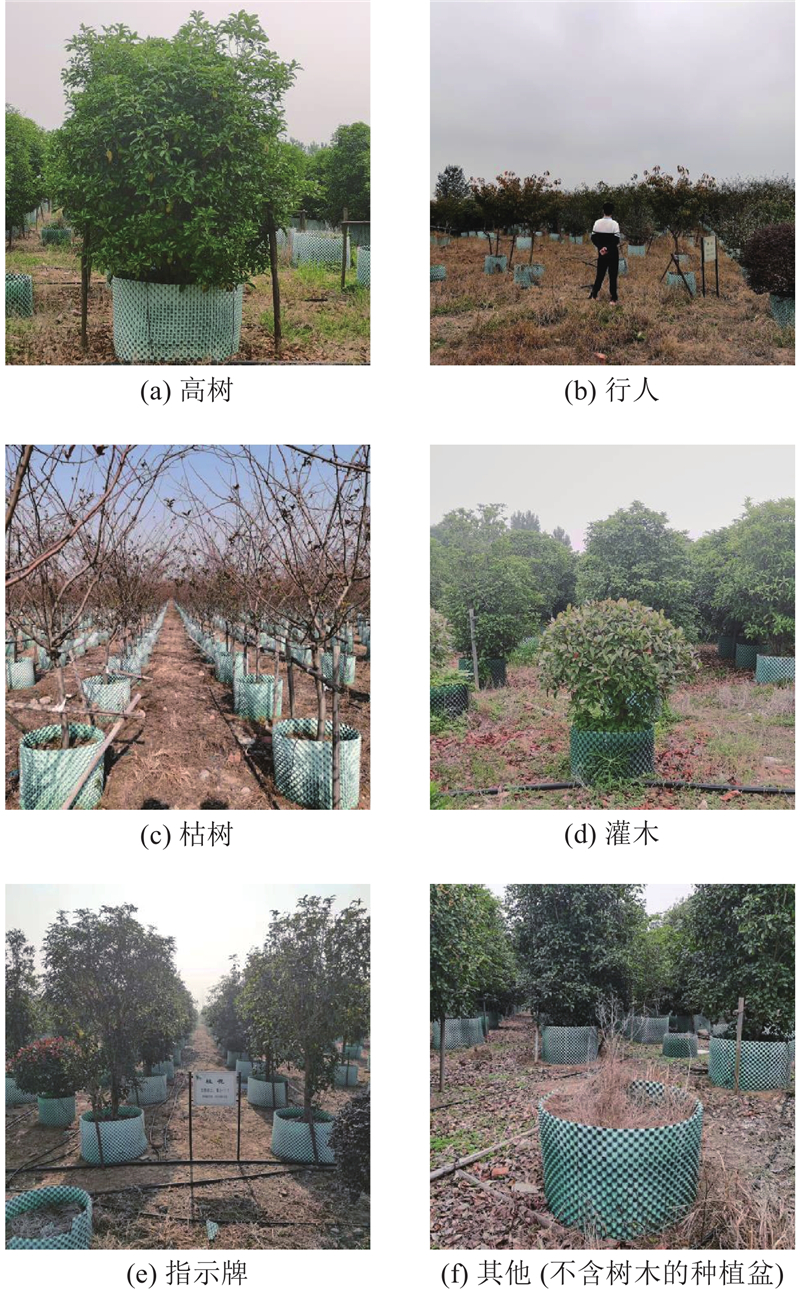
| 基于三维激光点云的苗圃场景多目标分类方法 |
刘慧( ),王秀丽,沈跃,徐婕 ),王秀丽,沈跃,徐婕 |
| 江苏大学 电气信息工程学院,江苏 镇江 212013 |
|
| Multi-objective classification method of nursery scene based on 3D laser point cloud |
| Hui LIU(),Xiu-li WANG,Yue SHEN,Jie XU |
| School of Electrical and Information Engineering, Jiangsu University, Zhenjiang 212013, China |
引用本文:
刘慧,王秀丽,沈跃,徐婕. 基于三维激光点云的苗圃场景多目标分类方法[J]. 浙江大学学报(工学版), 2023, 57(12): 2430-2438.
Hui LIU,Xiu-li WANG,Yue SHEN,Jie XU. Multi-objective classification method of nursery scene based on 3D laser point cloud. Journal of ZheJiang University (Engineering Science), 2023, 57(12): 2430-2438.
链接本文:
https://www.zjujournals.com/eng/CN/10.3785/j.issn.1008-973X.2023.12.010
或
https://www.zjujournals.com/eng/CN/Y2023/V57/I12/2430
|
| 1 |
JIN Y, LIU J, XU Z, et al Development status and trend of agricultural robot technology[J]. International Journal of Agricultural and Biological Engineering, 2021, 14 (4): 1- 19
|
| 2 |
郑永军, 陈炳太, 吕昊暾, 等 中国果园植保机械化技术与装备研究进展[J]. 农业工程学报, 2020, 36 (20): 110- 124
ZHENG Yong-jun, CHEN Bing-tai, Lyu Hao-tun, et al Research progress of orchard plant protection mechanization technology and equipment in China[J]. Transactions of the Chinese Society of Agricultural Engineering, 2020, 36 (20): 110- 124
doi: 10.11975/j.issn.1002-6819.2020.20.014
|
| 3 |
刘双喜, 徐春保, 张宏建, 等 果园基肥施肥装备研究现状与发展分析[J]. 农业机械学报, 2020, 51 (Suppl.2): 99- 108
LIU Shuang-xi, XU Chun-bao, ZHANG Hong-jian, et al Research status and development analysis of base-fertilizer application equipment of orchard[J]. Transactions of the Chinese Society for Agricultural Machinery, 2020, 51 (Suppl.2): 99- 108
|
| 4 |
江世界, 马恒涛, 杨圣慧, 等 果园喷雾机器人靶标探测与追踪系统[J]. 农业工程学报, 2021, 37 (9): 31- 39
JIANG Shi-jie, MA Heng-tao, YANG Sheng-hui, et al Target detection and tracking system for orchard spraying robots[J]. Transactions of the Chinese Society of Agricultural Engineering, 2021, 37 (9): 31- 39
doi: 10.11975/j.issn.1002-6819.2021.09.004
|
| 5 |
LI Y, LI M, QI J, et al Detection of typical obstacles in orchards based on deep convolutional neural network[J]. Computers and Electronics in Agriculture, 2021, 181 (8): 105932
|
| 6 |
MESHRAM A T, VANALKAR A V, KALAMBE K B, et al Pesticide spraying robot for precision agriculture: a categorical literature review and future trends[J]. Journal of Field Robotics, 2022, 39 (2): 153- 171
doi: 10.1002/rob.22043
|
| 7 |
CHEN X, ZHANG B, LUO L Multi-feature fusion tree trunk detection and orchard mobile robot localization using camera/ultrasonic sensors[J]. Computers and Electronics in Agriculture, 2018, 147: 91- 108
doi: 10.1016/j.compag.2018.02.009
|
| 8 |
白帆, 郑慧峰, 沈平平, 等 基于花朵特征编码归类的植物种类识别方法[J]. 浙江大学学报: 工学版, 2015, 49 (10): 1902- 1908
BAI Fan, ZHENG Hui-feng, SHEN Ping-ping, et al Plant species identification method based on flower feature coding classification[J]. Journal of Zhejiang University, 2015, 49 (10): 1902- 1908
|
| 9 |
LIU W, ANGUELOV D, ERHAN D, et al. SSD: single shot multibox detector [C]// European Conference on Computer Vision. [S.l.]: Springer, 2016: 21-37.
|
| 10 |
REDMON J, DIVVALA S, GIRSHICK R, et al. You only look once: unified, real-time object detection [C]// Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. Las Vegas: IEEE, 2016: 779-788.
|
| 11 |
REDMON J, FARHADI A. YOLO9000: better, faster, stronger [C]// Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. Honolulu: IEEE, 2017: 7263-7271.
|
| 12 |
BOCHKOVSKIY A, WANG C Y, LIAO H Y M. YOLOv4: optimal speed and accuracy of object detection [EB/OL]. (2020-04-23)[2022-09-26]. https://arxiv.org/pdf/2004.10934.pdf.
|
| 13 |
刘慧, 张礼帅, 沈跃, 等 基于改进SSD的果园行人实时检测方法[J]. 农业机械学报, 2019, 50 (4): 29- 35
LIU Hui, ZHANG Li-shuai, SHEN Yue, et al Real-time pedestrian detection in orchard based on improved SSD[J]. Transactions of the Chinese Society for Agricultural Machinery, 2019, 50 (4): 29- 35
|
| 14 |
蔡舒平, 孙仲鸣, 刘慧, 等 基于改进型YOLOv4的果园障碍物实时检测方法[J]. 农业工程学报, 2021, 37 (2): 36- 43
CAI Shu-ping, SUN Zhong-ming, LIU Hui, et al Real-time detection methodology for obstacles in orchards using improved YOLOv4[J]. Transactions of the Chinese Society of Agricultural Engineering, 2021, 37 (2): 36- 43
|
| 15 |
NIEMEYER J, ROTTENSTEINER F, SOERGEL U Contextual classification of lidar data and building object detection in urban areas[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2014, 87: 152- 165
doi: 10.1016/j.isprsjprs.2013.11.001
|
| 16 |
MALLET C, BRETAR F, ROUX M, et al Relevance assessment of full-waveform lidar data for urban area classification[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2011, 66 (6): S71- S84
doi: 10.1016/j.isprsjprs.2011.09.008
|
| 17 |
苏伟, 郭皓, 赵冬玲, 等 基于地基激光雷达的玉米真实叶面积提取方法研究[J]. 农业机械学报, 2016, 47 (7): 345- 353
SU Wei, GUO Hao, ZHAO Dong-ling, et al Estimation of actual leaf area of maize based on terrestrial laser scanning[J]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47 (7): 345- 353
|
| 18 |
SU H, MAJI S, KALOGERAKIS E, et al. Multi-view convolutional neural networks for 3D shape recognition [C]// Proceedings of the IEEE International Conference on Computer Vision. Santiago: IEEE, 2015: 945-953.
|
| 19 |
张满囤, 燕明晓, 马英石, 等 基于八叉树结构的三维体素模型检索[J]. 计算机学报, 2021, 44 (2): 334- 346
ZHANG Man-dun, YAN Ming-xiao, MA Ying-shi, et al 3D voxel model retrieval based on octree structure[J]. Chinese Journal of Computers, 2021, 44 (2): 334- 346
|
| 20 |
MATURANA D, SCHERER S. VoxNet: a 3D convolutional neural network for real-time object recognition [C]// 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems. Hamburg: IEEE, 2015: 922-928.
|
| 21 |
QI C R, SU H, MO K, et al. PointNet: deep learning on point sets for 3D classification and segmentation [C]// Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. Honolulu: IEEE, 2017: 652-660.
|
| 22 |
QI C R, YI L, SU H, et al. PointNet++: deep hierarchical feature learning on point sets in a metric space [C]// Proceedings of the 31st International Conference on Neural Information Processing Systems. New York: [s.n.], 2017: 5105-5114.
|
| 23 |
王浩云, 肖海鸿, 马仕航, 等 基于MRE-PointNet+AE的绿萝叶片外形参数估测算法[J]. 农业机械学报, 2021, 52 (1): 146- 153
WANG Hao-yun, XIAO Hai-hong, MA Shi-hang, et al Estimation algorithm of leaf shape parameters of scirpus sibiricum based on MRE-PointNet and autoencoder model[J]. Transactions of the Chinese Society for Agricultural Machinery, 2021, 52 (1): 146- 153
doi: 10.6041/j.issn.1000-1298.2021.01.016
|
| 24 |
JAYAKUMARI R, NIDAMANURI R R, RAMIYA A M Object-level classification of vegetable crops in 3D LiDAR point cloud using deep learning convolutional neural networks[J]. Precision Agriculture, 2021, 22 (5): 1617- 1633
doi: 10.1007/s11119-021-09803-0
|
| 25 |
QIAN Y, XU Q, YANG Y, et al Classification of rice seed variety using point cloud data combined with deep learning[J]. International Journal of Agricultural and Biological Engineering, 2021, 14 (5): 206- 212
doi: 10.25165/j.ijabe.20211405.5902
|
| 26 |
钟昌源, 胡泽林, 李淼, 等 基于分组注意力模块的实时农作物病害叶片语义分割模型[J]. 农业工程学报, 2021, 37 (4): 208- 215
ZHONG Chang-yuan, HU Ze-lin, LI Miao, et al Real-time semantic segmentation model for crop disease leaves using group attention module[J]. Transactions of the Chinese Society of Agricultural Engineering, 2021, 37 (4): 208- 215
|
| 27 |
林森, 刘美怡, 陶志勇 采用注意力机制与改进YOLOv5的水下珍品检测[J]. 农业工程学报, 2021, 37 (18): 307- 314
LIN Sen, LIU Mei-yi, TAO Zhi-yong Detection of underwater treasures using attention mechanism and improved YOLOv5[J]. Transactions of the Chinese Society of Agricultural Engineering, 2021, 37 (18): 307- 314
|
| 28 |
曾安, 彭杰威, 刘畅, 等 基于多尺度几何感知Transformer的植物点云补全网络[J]. 农业工程学报, 2022, 38 (4): 198- 205
ZENG An, PENG Jie-wei, LIU Chang, et al Plant point cloud completion network based on multi-scale geometry-aware point Transformer[J]. Transactions of the Chinese Society of Agricultural Engineering, 2022, 38 (4): 198- 205
doi: 10.11975/j.issn.1002-6819.2022.04.023
|
| 29 |
WOO S, PARK J, LEE J Y, et al. CBAM: convolutional block attention module [C]// Proceedings of the European Conference on Computer Vision. [S.l.]: Springer, 2018: 3-19.
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|