


近年来,曲面玻璃凭借独特的建筑美学效果,在高层建筑中得到了广泛应用[5-7],这对擦窗机器人技术提出了新的挑战。以真空吸附式单面擦窗机器人和磁吸附式双面擦窗机器人为例,在机器人吸附方式层面,真空吸附方式[8]对工作环境有很高的要求,其无法在曲面玻璃表面产生维持吸附所需的局部负压,致使吸附功能失效;而磁吸附方式[9]受限于传统双面擦窗机器人的刚性结构设计,致使曲面玻璃内外两侧的磁铁无法紧密吸合,难以产生足够大的吸附力。在机器人结构设计层面,传统擦窗机器人普遍采用正方形、圆角矩形等[10],其底部的刚性结构与曲面玻璃之间存在显著的几何失配:当将机器人安置在曲面玻璃内侧时,其边侧优先接触玻璃表面,而底部与玻璃表面形成较大空隙;当将机器人安置在外侧时,其底部中心优先接触玻璃表面,边侧与玻璃表面形成较大空隙。内外两侧的空隙均会导致清洁布和滚轮表面难以充分接触曲面玻璃表面,造成机器人无法实现清洁功能和移动功能。产生以上问题的根本原因在于:这些擦窗机器人的结构适应性较差,且灵活性低于柔性机器人[11-13]。
为解决上述问题,本文设计了一种由多机构铰接而成的磁吸附式自适应双面擦窗机器人。该机器人整体采用双机设计,通过设置在各机构上的磁吸附装置实现内外吸合;其清洁机构由多个节单元铰接而成。在该机器人贴合曲面玻璃的过程中,各机构上磁吸附装置产生的吸附力驱动各相邻机构及各相邻节单元的铰接结构之间产生夹角,使得机器人整体姿态与曲面玻璃的表面弧度保持一致,从而实现自适应贴合。本文研究内容如下:首先,对机器人的整体结构设计进行详细介绍;然后,对机器人的磁极排布方式进行优化,并分析机器人的曲面自适应性与运动稳定性;最后,搭建机器人样机并对其性能进行测试,以验证其设计的可行性与合理性。
1 双面擦窗机器人设计
1.1 研究思路
常见的曲面玻璃包括弧形玻璃、U形玻璃和波浪面玻璃等,如图1所示。
图1

为了设计适用于曲面玻璃的双面擦窗机器人,在结构方面,受履带多节铰接结构的启发,将机器人设计为由多个机构相互铰接而成。依托各相邻机构之间铰接部分产生的夹角实现机器人整体的柔性变形,以适应曲面玻璃表面的弧度,如图2所示。在此基础上,机器人整体采用双机设计,分为室内工作机和室外工作机。通过这一设计,一方面可以使机器人满足使用磁吸附方式的条件,即利用布置在内外机上的磁铁进行吸合,实现机器人整体在曲面玻璃上的稳定吸附;另一方面可以使机器人单次清洁玻璃内外两面,提高了工作效率。
图2
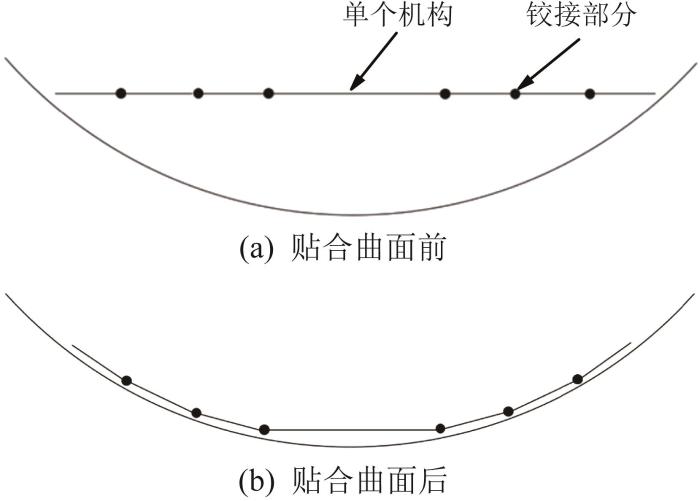
图2
多机构铰接装置贴合曲面过程
Fig.2
Process of multi-mechanism articulated device conforming to curved surface
在清洁方面,设计多个独立的清洁机构。通过在清洁机构底部布置柔性清洁布来擦拭玻璃表面。为了确保清洁布能充分接触玻璃表面,清洁机构同样采用铰接方式,其由多个节单元铰接而成。
1.2 机器人结构设计
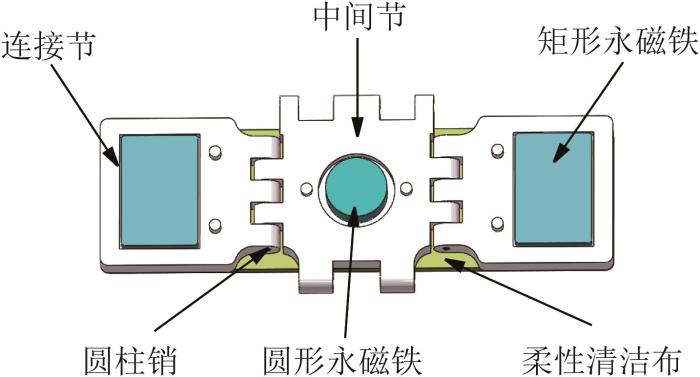
根据上述研究思路,对双面擦窗机器人的结构进行详细设计。室内工作机主要包括用于对窗框进行测距的测距机构、用于清洁玻璃内表面的室内清洁机构、用于提供驱动力的移动机构以及用于控制测距机构和移动机构的室内电控随动机构,如图3所示。上述各机构相邻侧均设有错位交叉的圆柱孔,通过圆柱销铰接;各机构均设有磁吸附装置(由多个永磁铁组成)。其中:室内电控随动机构设有万向轮和安全绳安置孔,用于提升机器人的移动稳定性和安全性。移动机构包括第一移动机构和第二移动机构,2个移动机构相对机器人前后中心线左右对称布置,均采用硅胶材质的滚轮[17],用于提供机器人在玻璃表面移动所需的摩擦力;通过控制2个移动机构的电机转速来实现机器人的直线行走和转向功能。测距机构和室内清洁机构均由若干个节单元通过圆柱销铰接而成。这2个机构的底部均设有柔性清洁布,通过在柔性清洁布上喷洒清洁液来清洁窗户表面;此外,测距机构还设有激光测距装置。室内清洁机构的结构如图4所示。
图3
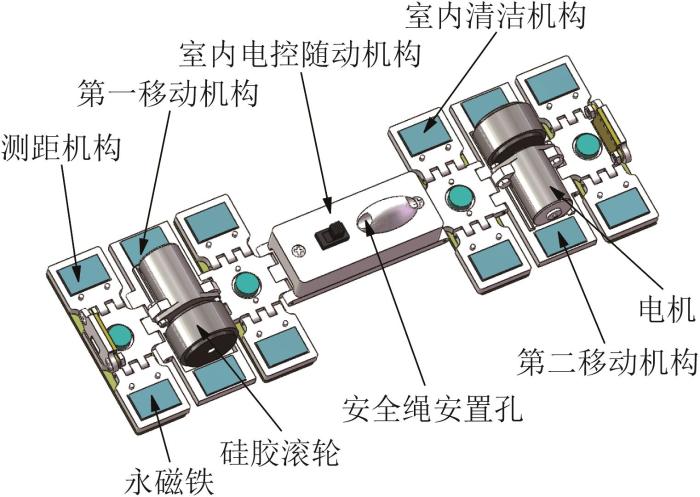
图4
室外工作机主要包括用于清洁玻璃外表面的室外清洁机构、用于跟随室内工作机移动的第一随动机构和第二随动机构,如图5所示。其中,室外清洁机构的结构和功能与室内清洁机构相同。同样的,上述各相邻机构之间也通过圆柱销铰接,且各机构均设有磁吸附装置。随动机构采用尼龙材质的万向轮,该万向轮具有良好的灵活性。
图5
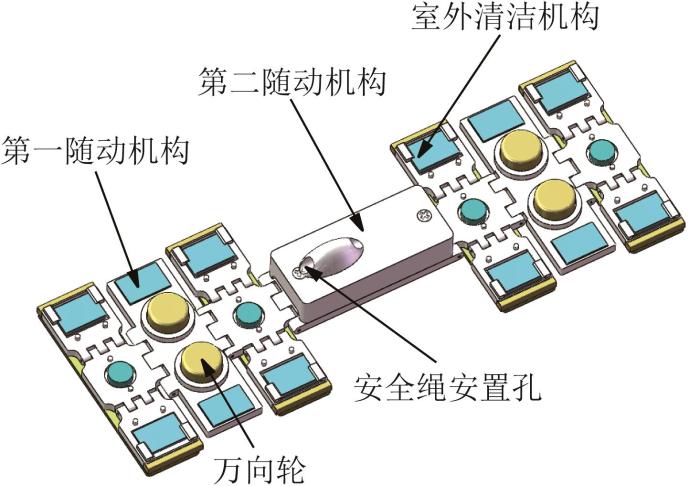
此外,对双面擦窗机器人整体进行轻量化处理,采用树脂材质,以提升其在清洁过程中的灵活性和稳定性。
1.3 机器人吸附设计
1)清洁机构的磁极排布分析。考虑到清洁机构的自身结构设计,现有2种可行的磁极排布方式,分别为磁极交叉排布和磁极相同排布,如图6所示。
图6
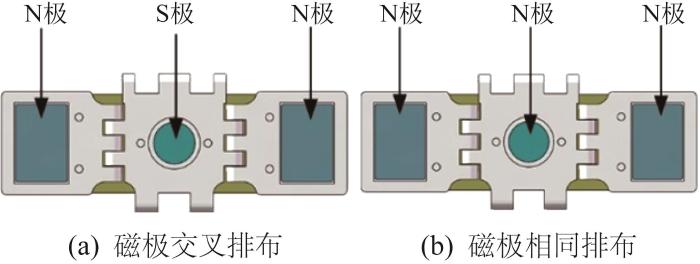
图6
清洁机构的2种磁极排布方式
Fig.6
Two magnetic pole arrangement modes for cleaning mechanism
利用Maxwell 3D软件对清洁机构在2种磁极排布方式下的磁感线分布情况进行仿真分析,结果如图7所示。
图7
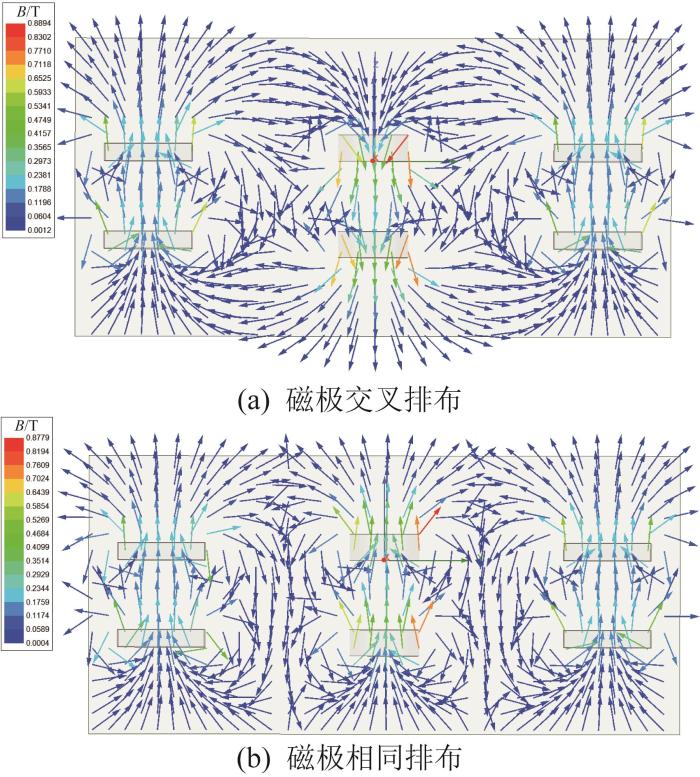
图7
2种磁极排布方式下清洁机构的磁感线分布情况
Fig.7
Distribution of magnetic induction line of cleaning mechanism under two magnetic pole arrangement modes
若采用磁极交叉排布方式,虽能增大磁铁磁力,但结合清洁机构整体结构来看,当中间节磁铁与两侧连接节磁铁的磁极不同时,则会吸引连接节向中间节侧旋转移动,致使连接节与玻璃表面之间的压力减小,从而导致机器人的清洁效果下降。而采用磁极相同排布方式时磁铁磁力虽存在一定程度的衰减,但相较于磁极交叉排布方式,可增大连接节与玻璃表面之间的压力,进而提高机器人的清洁效果。综合考虑,清洁机构采用磁极相同排布方式。
2)机器人整体的磁极排布分析。室内工作机与室外工作机上的磁铁对称布置。对于单个工作机(以室内工作机为例),现考虑3种磁极排布方式,分别为磁极交叉排布、磁极相同排布和磁极不完全交叉排布,如图8所示。
图8
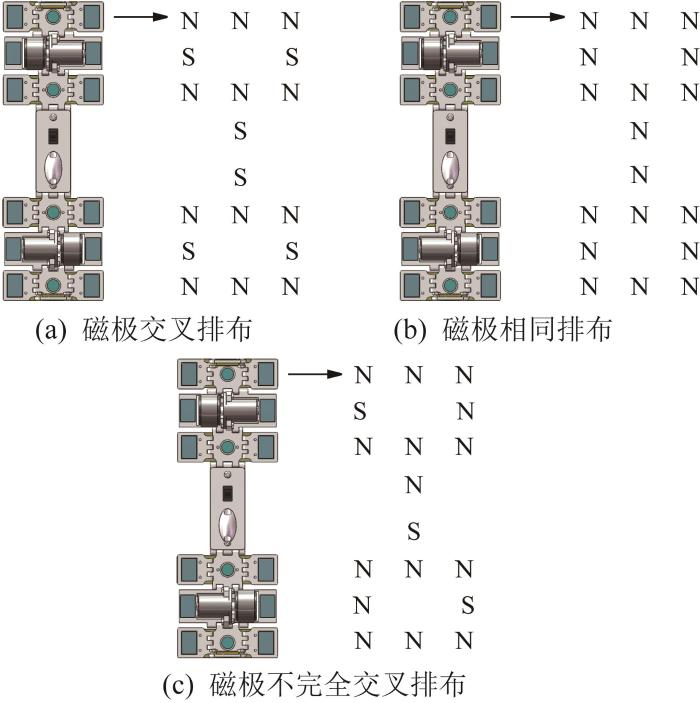
图8
室内工作机的3种磁极排布方式
Fig.8
Three magnetic pole arrangement modes for indoor working machine
利用Maxwell 3D软件对室内工作机在3种磁极排布方式下的磁感线分布情况进行仿真分析,结果如图9所示。
图9
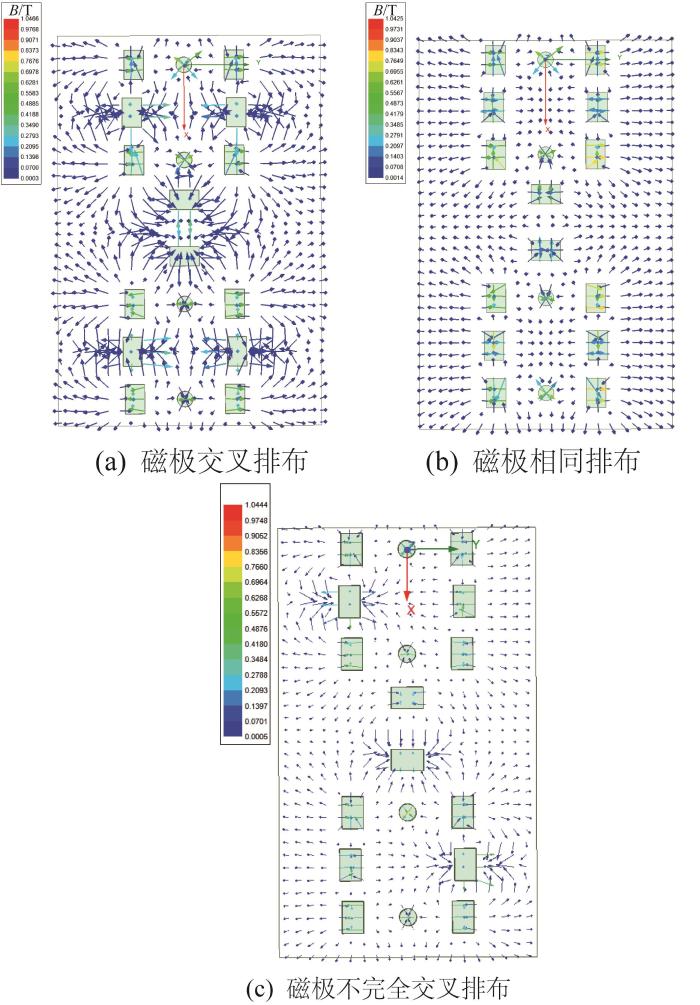
图9
3种磁极排布方式下室内工作机的磁感线分布情况
Fig.9
Distribution of magnetic induction line of indoor working machine under three magnetic pole arrangement modes
由图9(a)可知,在室内工作机各相邻机构之间,磁感线从磁铁N极出来后汇聚到相邻机构磁铁的S极处,起到了对磁铁磁感线聚拢的作用,减少了漏磁现象,外部表现为整体的磁铁磁力增大。由图9(b)可知,由于相邻机构磁铁的磁极相同,磁感线从磁铁N极出来后表现为互相排斥,漏磁量增大,外部表现为整体的磁铁磁力减小。由图9(c)可知,采用磁极交叉排布的单侧相邻机构之间的磁感线从磁铁N极出来后汇聚到相邻机构磁铁的S极处,减少了漏磁现象,但采用磁极相同排布的单侧相邻机构之间的磁感线从磁铁N极出来后互相排斥,漏磁量增大,故整体的磁铁磁力相较于图9(b)有所增大,但相较于图9(a)有所减小。综合考虑,对于整个机器人,采用磁极交叉排布方式。
2 双面擦窗机器人曲面自适应性分析
本文所设计的双面擦窗机器人整体通过布置在两机上的磁吸附装置来实现在曲面玻璃内外侧的稳定吸附。在吸附过程中,因受到多对磁铁组的磁力作用,室内外工作机上各相邻机构及各相邻节单元之间产生夹角,使得两机体变换为贴合曲面玻璃表面的姿态,如图10所示(以弧形曲面玻璃为例)。
图10
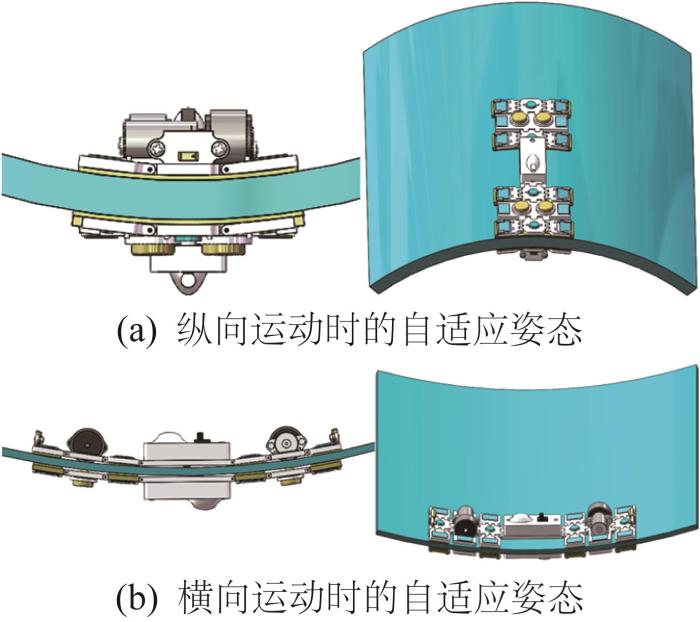
在机器人自适应曲面玻璃表面弧度的过程中,针对在曲面玻璃内侧清洁的室内工作机,由于移动机构并非由节单元铰接组成,当曲面玻璃内侧曲率较大时,移动机构的左右两边侧将优先接触玻璃内侧表面,而移动机构整体为刚性结构,其底座与玻璃内侧表面之间形成一定空隙,这可能会造成滚轮底部无法充分接触玻璃表面,从而导致机器人行进所需的摩擦力不足,无法实现移动。因此,需对机器人可自适应的最大曲面玻璃曲率进行分析。
本文所设计的移动机构总体长度为65 mm,硅胶滚轮的宽度为15 mm左右,去除两边侧部分,滚轮硅胶表面的宽度约为11 mm。硅胶表面边侧距离移动机构底部中心约6.25 mm,硅胶表面边侧距离玻璃内侧表面的高度即为滚轮底部的外露高度。若要使硅胶表面充分接触玻璃内侧表面,则须保证移动机构左右两边侧不与玻璃内侧表面接触。将移动机构两边侧接触玻璃内侧表面设为临界条件,即到达图11所示的边侧接触点,记录此时的滚轮底部外露高度。当滚轮底部外露高度满足上述临界条件下的高度,即可确保滚轮的硅胶表面与玻璃内侧表面充分接触。
图11
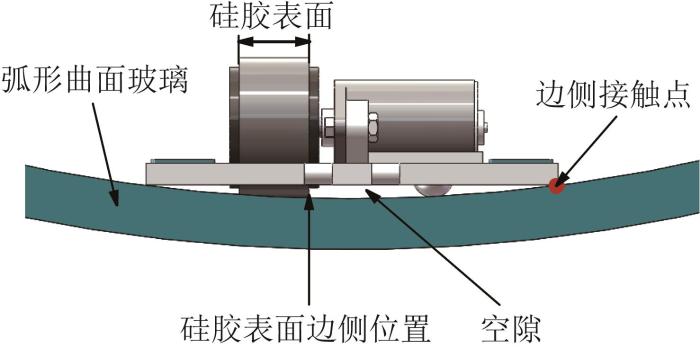
图11
移动机构贴合曲面玻璃的姿态
Fig.11
Posture of mobile mechanism conforming to curved glass
以边侧接触点为临界条件,通过限制滚轮底部外露高度来获得移动机构可实现正常工作时的曲面玻璃曲率范围。基于移动机构贴合曲面玻璃的姿态,以其底座中心对应的曲面玻璃内侧表面的点为原点构建坐标系,如图12所示。图中:Lp为移动机构底座长度,Lp=65 mm;dp为移动机构底座单侧到滚轮硅胶表面边侧的距离,dp=26.25 mm;h为滚轮底部外露高度。
图12
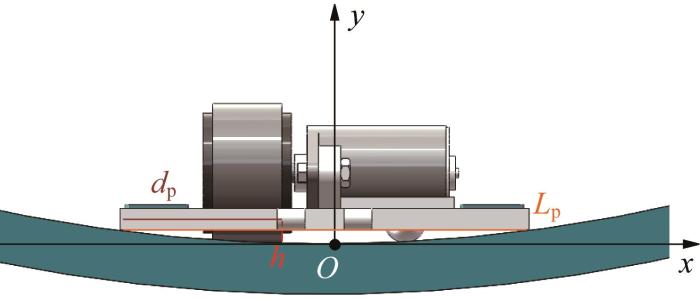
图12
移动机构贴合曲面玻璃的坐标系
Fig.12
Coordinate system for mobile mechanism conforming to curved glass
根据图12,得到滚轮底部外露高度h与曲面玻璃曲率值K(单位为m-1)的关系:
由
基于机器人能够自适应的最大曲面玻璃曲率,针对曲面玻璃厚度及曲率影响下清洁机构自适应贴合后所产生的位置差值进行分析。由于曲面玻璃具有一定厚度以及内外侧曲率不同,结构完全一致的室内外清洁机构在曲面玻璃内外侧吸附后,其边侧位置以及布置在两侧连接节上的内外磁铁的位置将产生一定的偏差,如图13所示。
图13
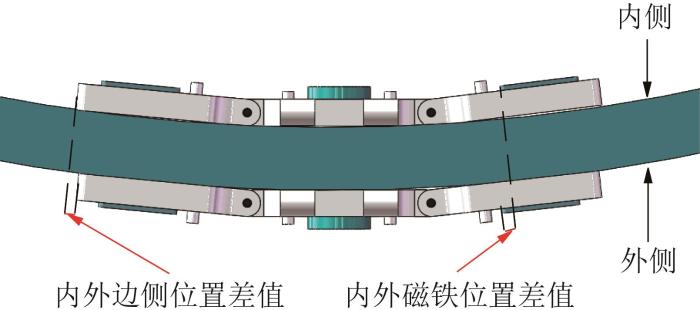
图13
室内外清洁机构贴合曲面玻璃后的位置差值
Fig.13
Position difference of indoor and outdoor cleaning mechanisms after conforming to curved glass
室内外清洁机构出现位置差值可能会引发以下问题:1)内外边侧位置差值会导致机器人的清洁区域不完整,降低了整体的清洁效果;2)内外磁铁位置差值会影响机器人整体的吸附效果。
针对上述问题,对目前市场上普遍使用的弧形曲面玻璃进行调研,其常见厚度为5~12 mm,其中8 mm厚的弧形曲面玻璃最常用。在此基础上,对曲面玻璃厚度和曲率不同时室内外清洁机构贴合曲面玻璃后的位置差值进行分析。
图14
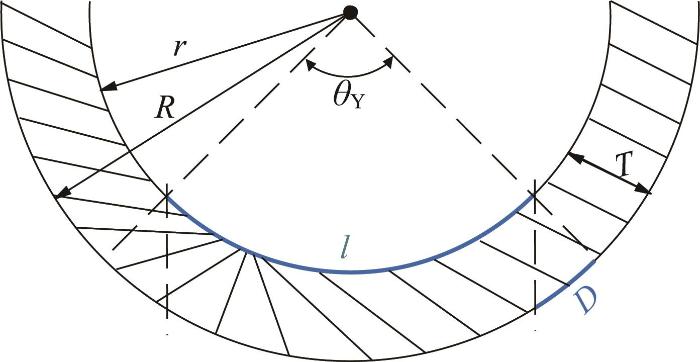
图14
室内外清洁机构贴合曲面玻璃的简图
Fig.14
Diagram of indoor and outdoor cleaning mechanisms conforming to curved glass
根据图14,可得:
利用
图15
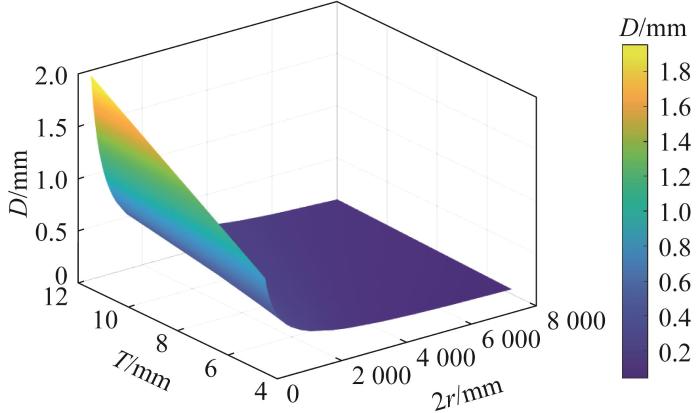
图15
曲面玻璃的厚度和曲率对室内外清洁机构边侧位置差值的影响
Fig.15
Influence of thickness and curvature of curved glass on edge position difference of indoor and outdoor cleaning mechanisms
由图15可知,在相同的弧形曲面玻璃内侧直径下,即内侧曲率相同时,室内外清洁机构边侧的位置差值与曲面玻璃厚度呈正相关,即厚度越大,位置差值越大。
选取曲面玻璃厚度为5、8、12 mm的不同情况,进一步分析曲面玻璃的厚度和曲率对机器人自适应性的影响,结果如表1所示。
表1 不同曲面玻璃厚度和曲率下室内外清洁机构边侧的位置差值 (mm)
Table 1
曲面玻璃内侧 曲率/m-1 | 曲面玻璃厚度/mm | ||
|---|---|---|---|
| 5 | 8 | 12 | |
| 4.88 | 0.81 | 1.30 | 1.95 |
| 4.00 | 0.67 | 1.07 | 1.60 |
| 3.50 | 0.58 | 0.93 | 1.40 |
| 3.00 | 0.50 | 0.80 | 1.20 |
| 2.50 | 0.42 | 0.67 | 1.00 |
| 2.00 | 0.33 | 0.53 | 0.80 |
| 1.50 | 0.25 | 0.40 | 0.60 |
| 1.00 | 0.17 | 0.27 | 0.40 |
| 0.50 | 0.08 | 0.13 | 0.20 |
| 0.10 | 0.02 | 0.03 | 0.04 |
以机器人能够自适应的最大曲面玻璃曲率为约束条件,通过分析可知,当曲面玻璃厚度为12 mm且曲率为4.88 m-1时,室内外清洁机构边侧的位置差值达到最大,约为1.95 mm。
基于上述分析结果,对室外清洁机构进行结构优化。以室内清洁机构为参考,其整体长度为66.8 mm,宽度为26.8 mm,中间节的长度和宽度均为26.8 mm,连接节长度为23.4 mm,宽度为20.0 mm。在此基础上,在室外清洁机构连接节边侧加装宽度为2 mm、长度为20 mm、厚度为2 mm的软橡胶套,利用橡胶的可逆形变特性来消除室内外清洁机构边侧的位置差值;同时,将安置矩形永磁铁的凹槽向外侧扩展2 mm,并在凹槽上下两侧增设卡扣结构,以限制磁铁的移动方向,使其仅能左右平移且不会脱离凹槽。通过上述优化设计,当内外磁铁产生位置差值时,外侧磁铁在内侧磁铁的吸引下平移,直至内外侧磁铁位置一致,外侧磁铁停止平移,以此消除内外侧磁铁的位置差值,进而保证机器人整体的吸附效果。室外清洁机构的优化结构如图16所示。
图16
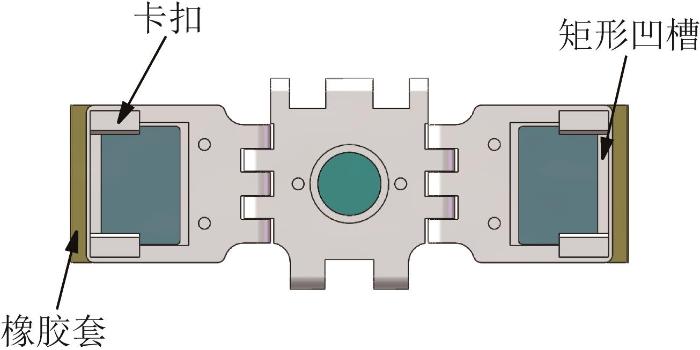
图17
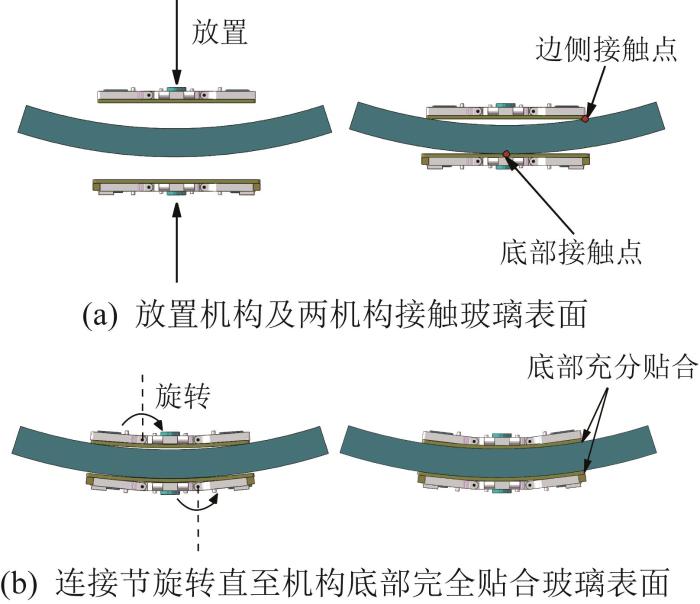
图17
优化后清洁机构自适应曲面玻璃的过程
Fig.17
Process of optimized cleaning mechanism adapting to curved glass
图18
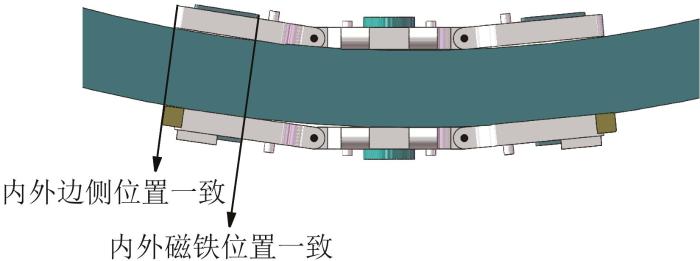
图18
优化后清洁机构贴合曲面玻璃的姿态
Fig.18
Posture of optimized cleaning mechanism conforming to curved glass
3 双面擦窗机器人运动稳定性分析
受恒定重力场的影响,双面擦窗机器人在曲面玻璃内外两侧工作时会失去稳态平衡,具体表现为:两侧吸附力不足或机器人自身相对于玻璃表面的摩擦力不够大导致机器人下滑及倾覆后翻,从而影响机器人清洁作业的安全性。为此,本节以机器人在弧形曲面玻璃内外两侧处于纵向吸附和横向吸附的2种典型状态为例,对其正常工作时的运动状态进行分析,以获得机器人稳定吸附在曲面玻璃内外两侧时所需满足的吸附力和驱动力条件,从而实现机器人在高危工况下安全稳定地完成清洁工作。
3.1 机器人纵向运动稳定性分析
当机器人在曲面玻璃上纵向运动时,各机构之间不产生夹角,即相对保持水平,而清洁机构各节单元之间产生夹角,以贴合曲面玻璃表面。对于机器人的纵向运动稳定性,保证清洁机构在工作时能够独立吸附在曲面玻璃表面并保持稳定是首要条件,以此减小各相邻机构之间的负面影响,提高机器人整体的稳定性。
将室内外清洁机构放置在曲面玻璃内外两侧进行吸附,该条件下清洁机构的受力如图19所示。其中:清洁机构单侧单个磁铁产生的吸附力为Fqci (i=1, 2, 3),曲面玻璃表面对单个节单元的支持力为Fqnj (j=1, 2, …, 6);室内、室外清洁机构的摩擦力分别为fn、fw,重力分别为Gqn、Gqw,摩擦系数分别为μqn、μqw。考虑到机器人纵向行进时,室外工作机因自身所受摩擦力的影响,其移动相较于室内工作机可能存在一定的滞后性。为有效消除这一滞后性,需减小室外清洁机构所受的摩擦力,故本文采用摩擦系数较小的柔性清洁布。然而,上述方式虽在一定程度上能够缓解滞后现象,但会造成fw<Gqw,即会额外产生作用于室内清洁机构的拉力。由此可得,清洁机构稳定吸附于曲面玻璃表面时需满足以下条件:
图19
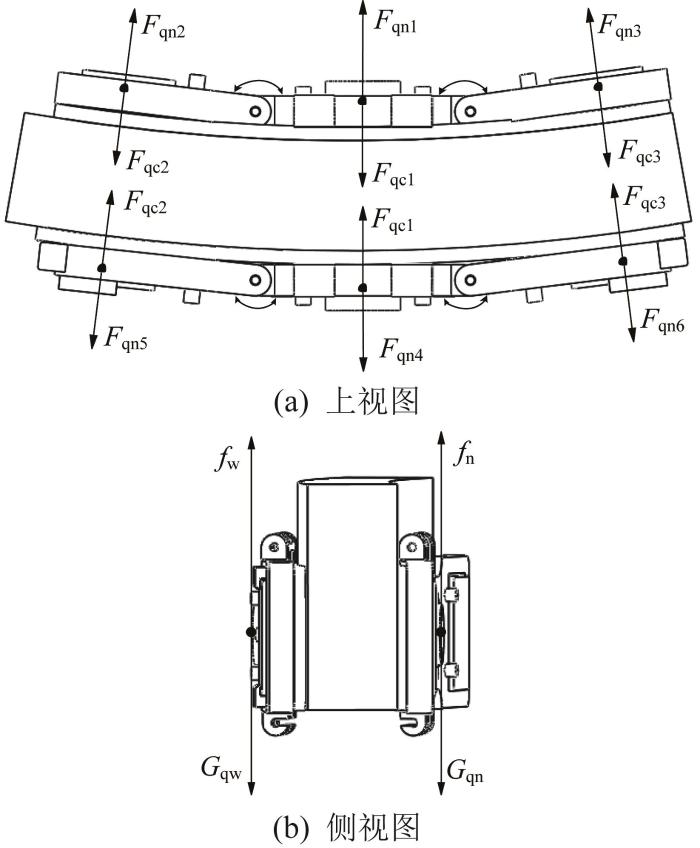
图19
清洁机构贴合曲面玻璃状态下的受力分析
Fig.19
Force analysis of cleaning mechanism in the state of conforming to curved glass
在清洁机构可以独立稳定吸附于曲面玻璃表面的基础上,对机器人整体的纵向运动稳定性进行分析。室内外工作机上设有对称布置的4组清洁机构,室外工作机随动机构产生的摩擦力可忽略不计。
通过上文分析可知,在机器人纵向行进过程中,当室内外工作机在曲面玻璃内外侧的位置保持相对一致时,机器人不会发生下滑或倾覆后翻等现象。但在实际工作中室外工作机的跟随移动可能存在滞后,当室内外工作机的相对位置错开严重时,两机之间的吸附力不足,这会导致机器人跌落。针对上述情况,做如下分析。
在机器人正常纵向行进的过程中,由于室外工作机不设有驱动装置,其依赖室内工作机提供行进的牵引力。令室外工作机的总行进阻力为Fz,当室内工作机提供的牵引力小于该行进阻力时,室外工作机的移动产生滞后。对室内工作机单侧进行受力分析,如图20所示。图中:Fd1、Fd2为滚轮提供的驱动力,FDM1、FDM2为滚动摩擦力,fna (a=1, 2, …, 4)为单个室内清洁机构或测距机构的滑动摩擦力,Fnc 、Fcc (c=1, 2, …, 9)分别为玻璃表面对各机构的支持力和各机构对玻璃表面的正压力,Gw、Gn分别为室外工作机和室内工作机的重力,d为滚轮中心到机器人质心的水平距离。
图20
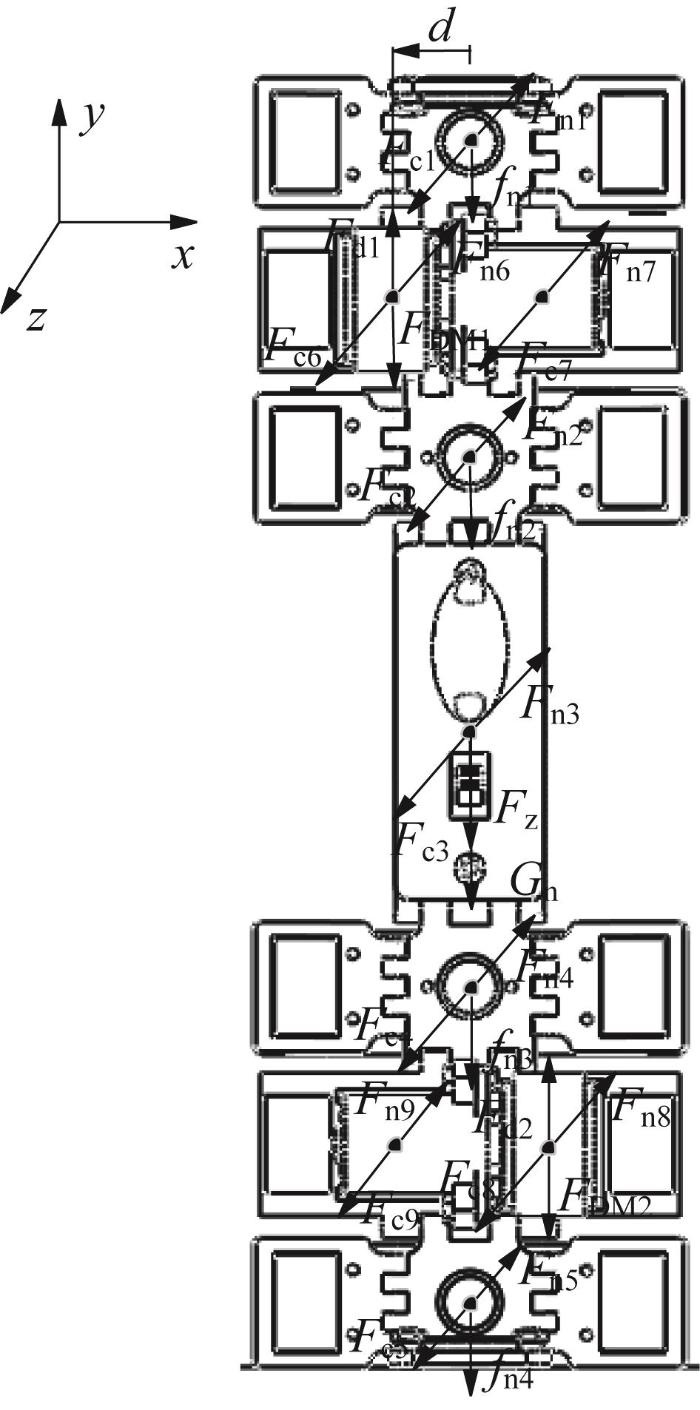
图20
机器人纵向运动时室内工作机的受力分析
Fig.20
Force analysis of indoor working machine during longitudinal motion of robot
根据图20,可得机器人需满足的抗滞后条件:
式中:fwa (a =1, 2, …, 4)为单个室外清洁机构的滑动摩擦力。
3.2 机器人横向运动稳定性分析
在清洁机构可独立稳定吸附于曲面玻璃表面的基础上,对于机器人的横向运动稳定性,首先要考虑其移动机构的倾覆问题。在保证移动机构可在曲面玻璃表面稳定移动的前提下,对机器人整体的横向运动稳定性进行分析。
首先,分别对移动机构横向运动时的2种姿态进行受力分析,令2种姿态下移动机构最易发生失稳的点分别为A、B点,如图21所示。图中:Fx为单个磁铁产生的吸附力,FD1、FD2为室外随动机构产生的向下拉力,Ff1为滚轮的侧向滑动摩擦力,d1、d2、l1、l2分别为2种姿态下单个磁铁到倾覆点A、B的距离,L1为磁铁到曲面玻璃表面的距离,h1为移动机构质心到倾覆点的距离,GS、GY分别为室外第一随动机构和移动机构的重力,μg为滚轮的摩擦系数。2种姿态下移动机构需满足的抗倾覆条件为:
图21
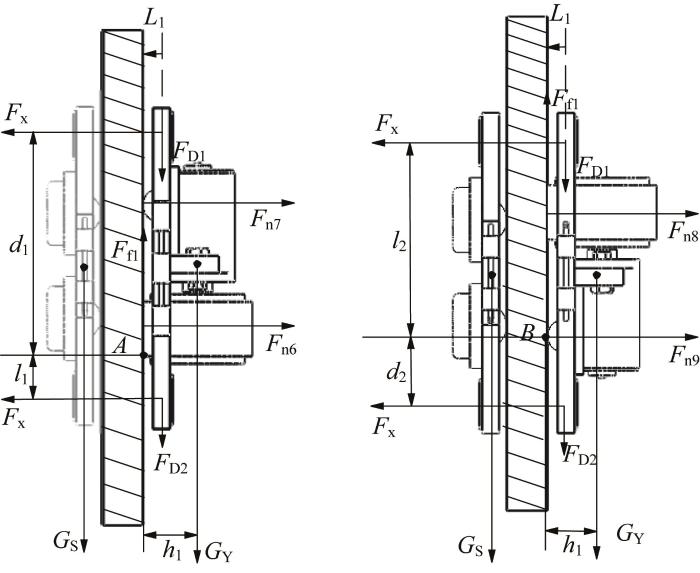
图21
移动机构在2种姿态下的受力分析(侧视图)
Fig.21
Force analysis of moving mechanism under two postures (lateral view)
随后,基于上述移动机构的抗倾覆条件,对机器人整体的横向运动稳定性进行分析。在机器人横向行进过程中,室内外工作机上各相邻机构之间产生夹角,以适应曲面玻璃表面弧度。在各相邻机构间产生夹角时,与机器人前进方向一致的测距机构存在倾覆后翻的可能。对机器人的横向运动过程进行受力分析,如图22所示。图中:Fqd1、Fqd2分别为玻璃表面对第一、第二移动机构的支持力,Fcd1、Fcd2分别为第一、第二移动机构对玻璃表面的吸附力,FTt (t=1, 2, …, 5)为第二移动机构提供给各机构的推力,FLu (u=1, 2, …, 5)为第一移动机构提供给各机构的拉力,fza (a=1, 2, …, 4)为单个室内清洁机构受到的滑动摩擦力,θo (o=1, 2, …, 6)为各相邻机构之间的夹角。根据图22,对测距机构所受的推力FT1进行分析,可得:
图22
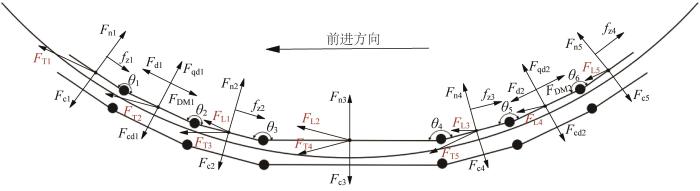
图22
机器人横向运动时的受力分析简图(俯视图)
Fig.22
Diagram of force analysis of robot during lateral motion (top view)
由
图23
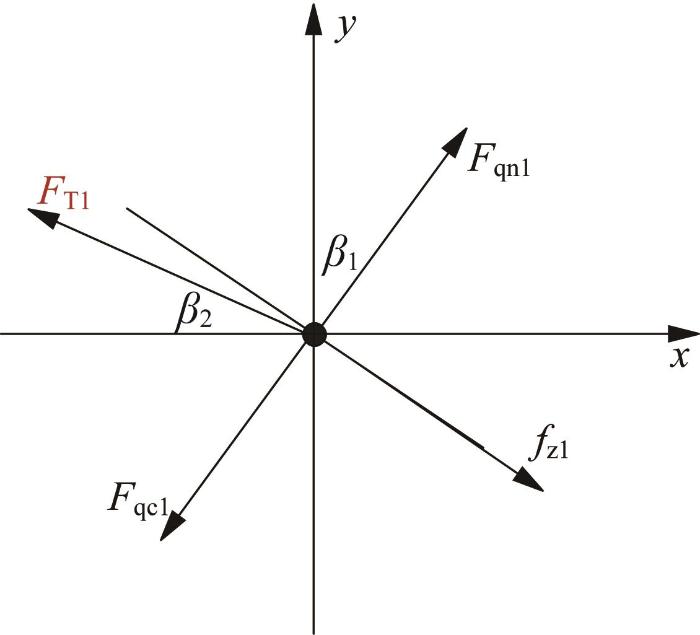
图23
测距机构横向运动时的受力分析
Fig.23
Force analysis of ranging mechanism during lateral motion
4 双面擦窗机器人实验测试
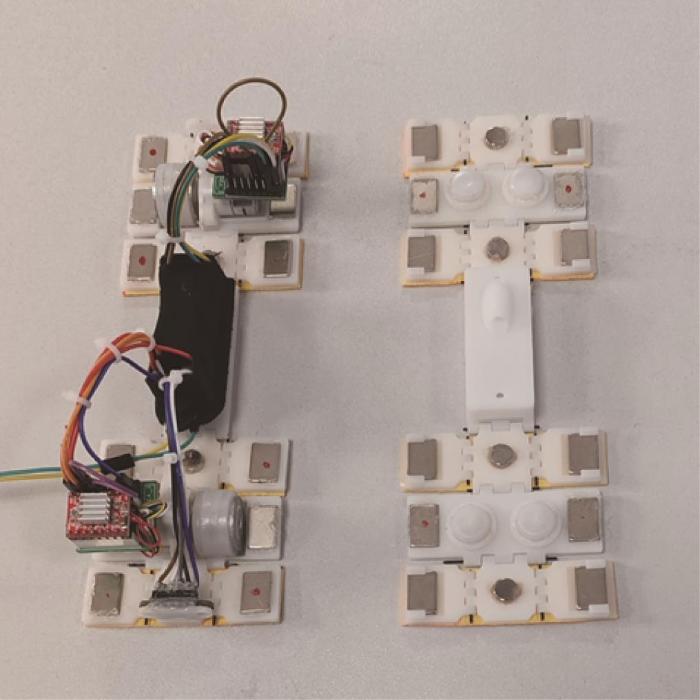
结合上述设计方案,制作双面擦窗机器人样机,如图24所示。
图24
4.1 清洁机构的贴合效果测试
由上文的机器人曲面自适应性分析结果可知,在满足机器人能够适应的最大曲面玻璃曲率的情况下,即曲面玻璃曲率小于或等于4.88 m-1时,对于曲面玻璃厚度和曲率造成的位置差值,室外清洁机构通过结构优化最大可弥补2 mm,且能够自适应5~12 mm厚度的玻璃。基于此,本文选用外侧直径为200 mm、厚度为5 mm的弧形曲面玻璃来测试机器人室内外清洁机构的贴合效果。利用
图25
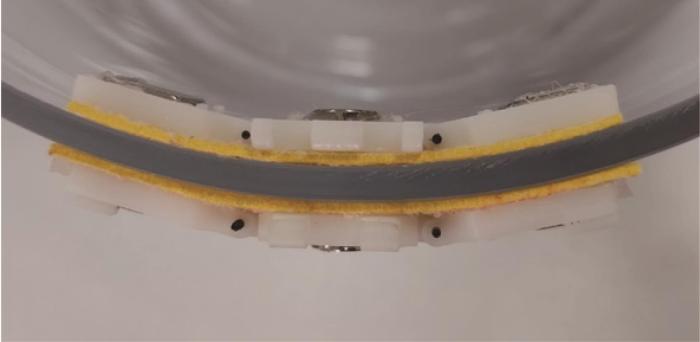
图25
室内外清洁机构在曲面玻璃上的贴合效果
Fig.25
Conforming effect of indoor and outdoor cleaning mechanisms on curved glass
4.2 机器人整体的贴合效果测试
选用外侧直径为1 155 mm、曲率约为1.73 m-1、厚度为5 mm的弧形曲面玻璃对机器人整体的贴合效果进行测试。
图26
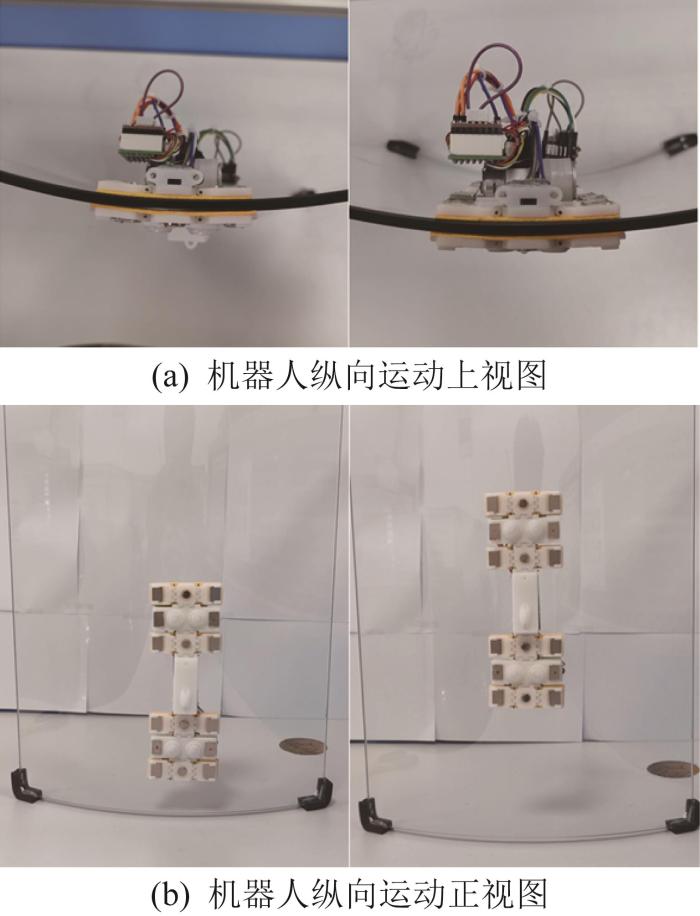
图26
机器人在曲面玻璃上纵向运动时的贴合效果
Fig.26
Conforming effect of robot during longitudinal motion on curved glass
图27
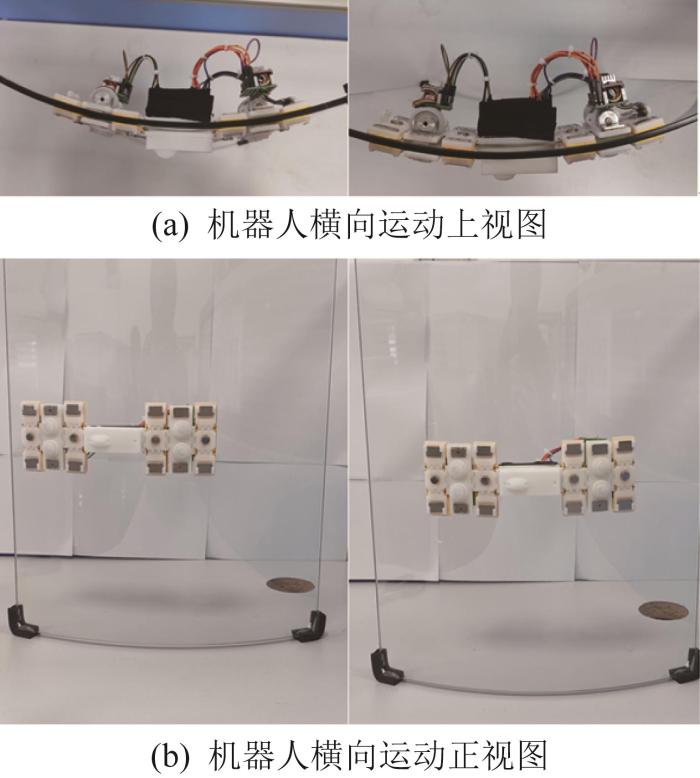
图27
机器人在曲面玻璃上横向运动时的贴合效果
Fig.27
Conforming effect of robot during lateral motion on curved glass
图28
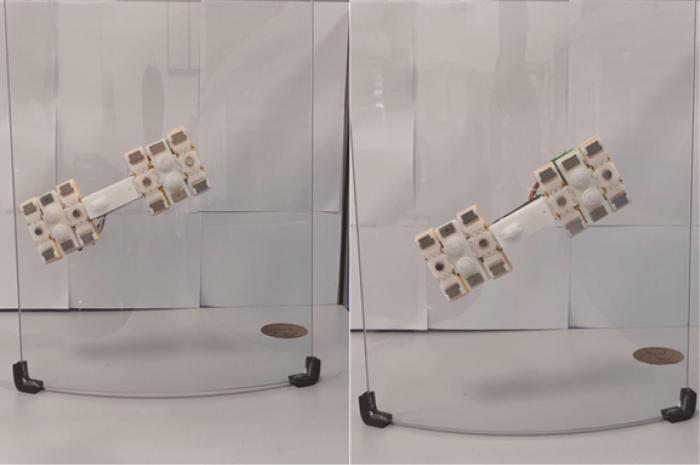
图28
机器人在曲面玻璃上斜向运动时的贴合效果
Fig.28
Conforming effect of robot during oblique motion on curved glass
4.3 不同类型机器人的对比实验
为进一步展现本文所设计的双面擦窗机器人对曲面玻璃的良好自适应性及运动稳定性,选择传统磁吸附式双面擦窗机器人开展对比实验。测试时同样采用外侧直径为1 155 mm、曲率约为1.73 m-1、厚度为5 mm的弧形曲面玻璃。因斜向运动与横、纵向运动过程基本相似,限于篇幅,未进行分析。
1)传统机器人纵向运动时的贴合效果测试。将传统机器人的主动机及随动机分别竖直放置在弧形曲面玻璃内外两侧,松手后该机器人整体发生滑落,如图29所示。分析原因在于:传统机器人双机底部整体为刚性结构,无法对曲面玻璃表面进行自适应贴合。如图29(b)所示,主动机两边侧优先接触曲面玻璃表面,其底部与玻璃表面之间存在较大空隙,致使滚轮表面无法接触玻璃表面,从而导致机器人缺乏在玻璃表面维持稳定行进所需的摩擦力;同时,双机底部刚性结构造成主动机与随动机无法对称吸附,玻璃外侧随动机发生侧方抬起,致使主动机与随动机单侧磁铁之间的距离过大,从而导致机器人整体吸附力不足。此外,因机器人底部与玻璃表面之间始终存在空隙,清洁布也无法接触玻璃表面,无法完成清洁功能。
图29
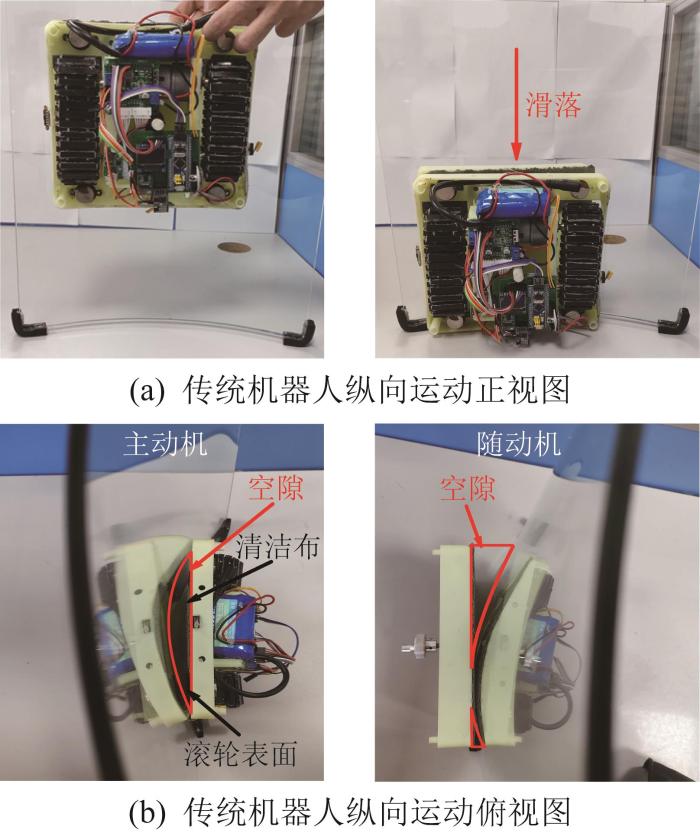
图29
传统机器人在曲面玻璃上纵向运动时的贴合效果
Fig.29
Conforming effect of traditional robot during longitudinal motion on curved glass
2)传统机器人横向运动时的贴合效果测试。将传统机器人的主动机及随动机横向放置在弧形曲面玻璃内外两侧,松手后该机器人同样发生滑落,如图30所示,其滑落原因与纵向运动时一样。
图30
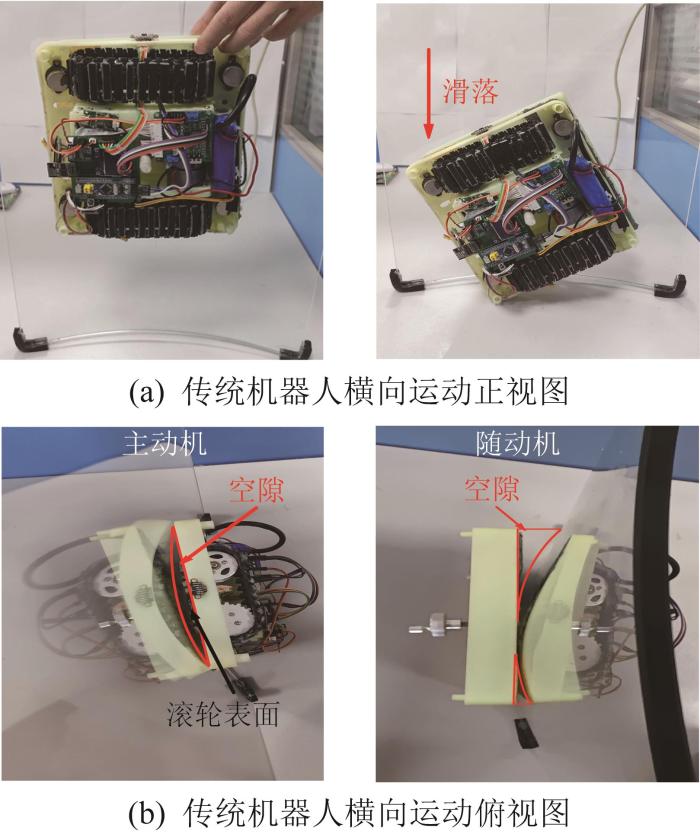
图30
传统机器人在曲面玻璃上横向运动时的贴合效果
Fig.30
Conforming effect of traditional robot during lateral motion on curved glass
通过与传统机器人对比发现:本文所设计的双面擦窗机器人对曲面玻璃具有良好的自适应性,机体的多机构铰接设计可实现机器人在贴合曲面玻璃过程中的姿态变换,使得机器人整体姿态适应曲面玻璃表面弧度,进而保证滚轮表面及柔性清洁布均能充分接触曲面玻璃表面,为机器人在曲面玻璃表面稳定移动提供了足够的摩擦力及吸附力,以满足机器人在曲面玻璃上正常工作的必要条件。
5 结 论
本文针对现有的各类擦窗机器人在曲面玻璃上无法正常工作且清洁效果差的问题,设计了一种应用于曲面玻璃的自适应双面擦窗机器人。该机器人整体采用双机设计,两机体均采用多机构及多个节单元铰接的方式制成。在机器人吸附过程中,其各相邻机构及各相邻节单元在吸附力作用下产生夹角,使得机器人的整体姿态与曲面玻璃表面弧度保持一致,从而实现机器人对曲面玻璃的自适应。通过在实际工作场景中对机器人样机进行实验测试,展示了机器人对曲面玻璃内外侧的良好自适应贴合效果以及不同姿态下的运动稳定性。与传统的双面擦窗机器人相比,所设计的机器人在曲面玻璃上运动时的整体贴合效果以及运动稳定性均显著提高,这可为曲面玻璃清洁机器人技术的进一步发展提供新的思路与解决方案。
然而,机器人目前能适应的曲面玻璃曲率还存在一定的局限性。在未来研究中,将对机器人的结构进行优化设计,以拓宽其能够自适应的曲率范围;同时,进一步扩展其应用场景,如圆柱形管道或大型圆柱形玻璃等。
参考文献
擦窗机器人结构设计及关键技术研究
[D].
Structural design and key technical research of window cleaning robot
[D].
磁吸附擦窗机器人结构设计及关键技术研究
[D].
Structural design and key technology research of magnetically adsorbed window cleaning robot
[D].
磁吸附轮式擦窗机器人动力学建模与仿真
[J].
Dynamics modeling and simulation on magnetic adsorption wheel of window cleaning robot
[J].
磁吸附式家用擦窗机器人结构设计与工作性能分析
[D].
Structural design and working performance analysis of a magnetic adsorption type household window cleaning robot
[D].
超高大曲面玻璃砖幕墙施工技术
[J].
Construction technology of super tall curved glass brick curtain wall
[J].
基于BIM的曲面玻璃穹顶深化设计研究
[J].
Research on deepening design of curved glass dome based on BIM
[J].
多曲面幕墙工艺创新与成本分析
[J].
Technological innovation and cost analysis of multi-curved curtain wall
[J].
真空吸附式叶片爬壁机器人结构设计与分析
[D].
Structural design and analysis of vacuum adsorption blade wall climbing robot
[D].
智能擦窗爬壁机器人的设计与实现
[D].
Design and implementation of an intelligent window climbing robot
[D].
A survey on techniques and applications of window-cleaning robots
[J].
面向TEM手术的柔性机器人设计与控制
[J].
Design and control of a flexible robot for TEM surgery
[J].
Modeling, simulations and experiments with generally routed cable-driven continuum robots and their application to three-fingered grippers
[J].
仿生柔性外肢体机器人的优化设计与实现
[J].
Optimal design and implementation of a bioinspired soft supernumerary robotic limb
[J].DOI:10.1007/s10846-024-02102-6 [本文引用: 1]
爬壁机器人磁吸附模块设计分析与结构参数优化
[J].
Design analysis and structural parameter optimization for magnetic adsorption module of wall-climbing robot
[J].
Research on passive adaptive wall-climbing cleaning and inspection robot of marine cylindrical steel structure based on conical magnetic adsorption wheel
[J].
Study on the influence of wind load on the safety of magnetic adsorption wall-climbing inspection robot for gantry crane
[J].
Research on the dynamic behaviors in the sliding friction of silicone
[J].
轮足式磁吸附越障爬壁机器人设计与分析
[J].
Design and analysis of wheel-footed magnetic adsorption wall-climbing robot with passing obstacles capability
[J].DOI:10.3901/jme.2024.01.248 [本文引用: 1]
履带式爬壁除锈机器人设计及试验
[J].
Design and experiment of crawler wall-climbing derusting robot
[J].
钕铁硼永磁材料的生产应用及发展前景
[J].
Production applications and development proposals of NdFeB permanent magnet materials
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}