| 机械工程 |
|

|
|
|
| 基于变权重PSO-Elman神经网络的路面附着系数估计 |
王骏骋( ),王法慧 ),王法慧 |
| 1. 浙江理工大学 机械工程学院,浙江 杭州 310018 |
|
| Variable weight PSO-Elman neural network based roadadhesion coefficient estimation |
| Juncheng WANG(),Fahui WANG |
| 1. School of Mechanical Engineering, Zhejiang Sci-Tech University, Hangzhou 310018, China |
| 1 |
《中国公路学报》编辑部 中国汽车工程学术研究综述·2017[J]. 中国公路学报, 2017, 30 (6): 1- 197
Editorial Department of China Journal of Highway and Transport Review on China’s automotive engineering research progress: 2017[J]. China Journal of Highway and Transport, 2017, 30 (6): 1- 197
doi: 10.19721/j.cnki.1001-7372.2017.06.001
|
| 2 |
NGUYEN T, LECHNER B, WONG Y D Response-based methods to measure road surface irregularity: a state-of-the-art review[J]. European Transport Research Review, 2019, 11 (1): 1- 18
doi: 10.1186/s12544-018-0328-2
|
| 3 |
LEE H, TAHERI S Intelligent tires: a review of tire characterization literature[J]. IEEE Intelligent Transportation Systems Magazine, 2017, 9 (2): 114- 135
doi: 10.1109/MITS.2017.2666584
|
| 4 |
ZHANG D, ZOU Q, LIN H, et al Automatic pavement defect detection using 3D laser profiling technology[J]. Automation in Construction, 2018, 96: 350- 365
doi: 10.1016/j.autcon.2018.09.019
|
| 5 |
GARCIA-POZUELO D, OLATUNBOSUN O, YUNTA J, et al A novel strain-based method to estimate tire conditions using fuzzy logic for intelligent tires[J]. Sensors, 2017, 17 (2): 350
doi: 10.3390/s17020350
|
| 6 |
REINA G, LEANZA A, MESSINA A Terrain estimation via vehicle vibration measurement and cubature Kalman filtering[J]. Journal of Vibration and Control, 2020, 26 (11/12): 885- 898
|
| 7 |
WANG Y, HU J Y, WANG F A, et al Tire road friction coefficient estimation: review and research perspectives[J]. Chinese Journal of Mechanical Engineering, 2022, 35 (1): 1- 11
doi: 10.1186/s10033-021-00666-0
|
| 8 |
RATH J J, VELUVOLU K C, DEFOORT M Simultaneous estimation of road profile and tire road friction for automotive vehicle[J]. IEEE Transactions on Vehicular Technology, 2014, 64 (10): 4461- 4471
|
| 9 |
李韶华, 王桂洋, 杨泽坤, 等 基于DRBF-EKF算法的车辆质心侧偏角与路面附着系数动态联合估计[J]. 力学学报, 2022, 54 (7): 1853- 1865
LI Shaohua, WANG Guiyang, YANG Zekun, et al Dynamic joint estimation of vehicle sideslip angle and road adhesion coefficient based on DRBF-EKF algorithm[J]. Chinese Journal of Theoretical and Applied Mechanics, 2022, 54 (7): 1853- 1865
|
| 10 |
QI G X, FAN X B, LI H A comparative study of the recursive least squares and fuzzy logic estimation methods for the measurement of road adhesion coefficient[J]. Australian Journal of Mechanical Engineering, 2023, 21 (4): 1230- 1246
doi: 10.1080/14484846.2021.1967839
|
| 11 |
PARK J, MIN K, KIM H, et al Road surface classification using a deep ensemble network with sensor feature selection[J]. Sensors, 2018, 18 (12): 4342
doi: 10.3390/s18124342
|
| 12 |
SUN Z Y, HAO X L, LI W, et al Asphalt pavement friction coefficient prediction method based on genetic-algorithm-improved neural network (GAI-NN) model[J]. Canadian Journal of Civil Engineering, 2022, 49 (1): 109- 120
doi: 10.1139/cjce-2020-0051
|
| 13 |
林棻, 王少博, 赵又群, 等 基于改进 Keras 模型的路面附着系数估计[J]. 机械工程学报, 2021, 57 (12): 74- 86
LIN Fen, WANG Shaobo, ZHAO Youqun, et al Road friction coefficient estimation based on improved Keras model[J]. Journal of Mechanical Engineering, 2021, 57 (12): 74- 86
doi: 10.3901/JME.2021.12.074
|
| 14 |
ŠABANOVIč E, ŽURAULIS V, PRENTKOVSKIS O, et al Identification of road-surface type using deep neural networks for friction coefficient estimation[J]. Sensors, 2020, 20 (3): 612
doi: 10.3390/s20030612
|
| 15 |
伍文广, 张凡皓, 徐孟龙 基于 Elman 神经网络的路面附着系数识别[J]. 重庆大学学报, 2023, 46 (3): 118- 128
WU Wenguang, ZHANG Fanhao, XU Menglong Identification of road friction coefficient based on Elman neural network[J]. Journal of Chongqing University, 2023, 46 (3): 118- 128
|
| 16 |
MALHOTRA R, SINGH P. Recent advances in deep learning models: a systematic literature review [J]. Multimedia Tools and Applications , 2023: 1-84.
|
| 17 |
金智林, 严正华 基于二次预测型横向载荷转移率的汽车侧翻预警研究[J]. 中国机械工程, 2019, 30 (15): 1790- 1795
JIN Zhilin, YAN Zhenghua Research on vehicle rollover warning based on secondary predictive lateral load transfer ratio[J]. China Mechanical Engineering, 2019, 30 (15): 1790- 1795
|
| 18 |
PEEIE M H B, OGINO H, OSHINOYA Y Skid control of a small electric vehicle with two in-wheel motors: simulation model of ABS and regenerative brake control[J]. International Journal of Crashworthiness, 2016, 21 (5): 396- 406
doi: 10.1080/13588265.2016.1147731
|
| 19 |
YOU S, GIL J, KIM W Fixed-time slip control with extended-state observer using only wheel speed for anti-lock braking systems of electric vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2021, 23 (7): 6368- 6378
|
| 20 |
宋涛. 轮毂驱动电动车的路面附着系数估计方法研究[D]. 哈尔滨: 哈尔滨工业大学, 2017.
SONG Tao. Road friction coefficient estimation of in-wheel-motor electric vehicle [D]. Harbin: Harbin Institute of Technology, 2017.
|
| 21 |
AB AZIZ M F, MOSTAFA S A, FOOZY C F M, et al Integrating Elman recurrent neural network with particle swarm optimization algorithms for an improved hybrid training of multidisciplinary datasets[J]. Expert Systems with Applications, 2021, 183: 115441
doi: 10.1016/j.eswa.2021.115441
|
| 22 |
JARI A, AVOKH A PSO-based sink placement and load-balanced anycast routing in multi-sink WSNs considering compressive sensing theory[J]. Engineering Applications of Artificial Intelligence, 2021, 100: 104164
doi: 10.1016/j.engappai.2021.104164
|
| 23 |
彭晓燕, 章兢, 陈昌荣 基于 RBF 神经网络的最佳滑移率在线计算方法[J]. 机械工程学报, 2011, 47 (14): 108- 113
PENG Xiaoyan, ZHANG Jing, CHEN Changrong Calculation of RBF neural network based optimal slip ratio[J]. Journal of Mechanical Engineering, 2011, 47 (14): 108- 113
doi: 10.3901/JME.2011.14.108
|
| 24 |
YANG Y, TANG Q S, BOLIN L, et al Dynamic coordinated control for regenerative braking system and anti-lock braking system for electrified vehicles under emergency braking conditions[J]. IEEE Access, 2020, 8: 172664- 172677
doi: 10.1109/ACCESS.2020.3024918
|
| 25 |
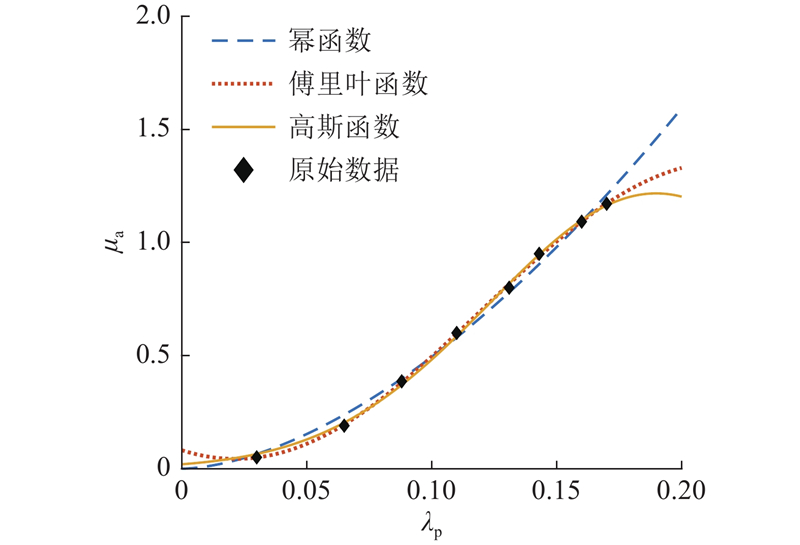
戚尔鹏, 叶鹰 漂移幂函数的数值拟合与理论分析[J]. 情报学报, 2016, 35 (12): 1285- 1295
QI Erpeng, YE Ying Data fitting and theoretical analysis of the shifted power function[J]. Journal of the China Society for Scientific and Technical Information, 2016, 35 (12): 1285- 1295
|
| 26 |
GUO H A simple algorithm for fitting a Gaussian function [DSP tips and tricks][J]. IEEE Signal Processing Magazine, 2011, 28 (5): 134- 137
doi: 10.1109/MSP.2011.941846
|
| 27 |
SUN T J, GAO Z H, GAO F, et al Intelligent vehicle automatic stop-and-go task based on humanized learning control model[J]. Advances in Civil Engineering, 2021, 2021: 1- 11
|
| 28 |
PANCHAL G, GANATRA A, KOSTA Y P, et al Behaviour analysis of multilayer perceptrons with multiple hidden neurons and hidden layers[J]. International Journal of Computer Theory and Engineering, 2011, 3 (2): 332- 337
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|