

目前,排队长度估计方法主要分为2类. 第1类基于交通波理论,Ramezani等[4]基于交通波理论描述排队形成和消散过程,以粗略估计混合交通流的排队长度;王钰等[5]引入“消散延误”的概念来实时估计交叉口排队长度,但假设车流到达率为常数;Mohajerpoor等[6]依据车辆延误提出基于交通波理论的排队长度估计方法;李爱杰等[7]使用单截面低频定点检测器估计每周期最大排队长度,但估计误差较大;Yao等[8]结合概率模型和交通波理论,通过估计停止车辆的体积估计排队长度,该方法要求车流到达分布已知;唐进等[9]运用密度聚类方法识别车辆运动状态,推算出信号交叉口的排队长度,但该方法仅适用于渗透率已知的情况;刘旭星等[10]根据网联车轨迹数据提出周期初始队列长度和最大排队长度的估计方法,但该方法仅适用于渗透率较高的情况. 第2类是基于概率论的方法,Li等[11]在低渗透率条件下利用车辆轨迹和交通信号数据估计队列长度;Comert[12-13]使用停止线检测器与车辆轨迹估计排队长度,模型要求车流到达分布已知;随后针对低渗透率条件提出实时队列长度估计模型但估计精度较差;Zhao等[14]根据停车位置分布估计ICVs渗透率,进而估计排队长度,但该方法严重依赖历史数据;Mei等[15]基于贝叶斯方法估计队列的最大队列长度,该方法在渗透率较低时误差较大;Wong等[16]提出无偏的单源数据渗透率(single-source data penetration rate,SSDPR)估计方法,在渗透率较低时估计方差和误差较大;Tan等[17]提出基于车道的队列长度估计方法来估计饱和与非饱和状态下的排队长度;Talukder等[18]使用最小二乘法和小波变换实现排队长度估计,但小波变换的参数标定未给出;Zhao等[19]基于最大似然估计方法估计排队长度,但无法估计周期内的某一车道的排队长度;Zhao等[20]根据交叉口停车位置分布估计ICVs渗透率,但无法实时估计排队长度.
综上,已有排队长度估计模型均基于一定的假设,如渗透率(高渗透率)固定、车辆到达分布固定、排队车辆绝对静止或单一交通流等. 随着ICVs的普及,其渗透率会随时间发生变化,ICVs随机分布在各车道中. 并且,由于智能控制算法的存在,低速前进和停车2种运动状态交替出现,排队车辆并非处于绝对静止状态. 已有排队长度估计模型无法适应新的ICVs和人驾车辆(human-driven vehicles, HDVs)混行交通场景. 为了解决上述问题,提出ICVs和HDVs混合交通流排队长度估计模型,所提模型考虑排队车辆的特殊运动状态,旨在实现信号交叉口排队长度的实时估计;此外,为了解决渗透率估计严重依赖历史数据和难以动态估计的问题,引入滚动迭代估计渗透率的方法.
1. 混合交通流排队过程分析
ICVs的加入有助于获取更加详细的交通流数据. 本研究对象为ICVs和HDVs在停车线前的排队行为,ICVs和HDVs的主要差异在于是否能够向数据中心传输数据[21],但该主要差异并不会影响车辆的具体行为,为了更符合实际,假设ICVs和HDVs随机混合在城市道路交通流中.
ICVs在队列中的分布影响排队长度的估计,如图1所示为车辆排队过程观察示意图. 图中,
图 1

2. 排队估计模型构建
所提出的ICVs和HDVs混行交叉口排队长度估计模型,包括可观测队列的排队长度估计模型和不可观测队列的排队长度估计模型. 模型构建和验证的详细流程如图2所示.
图 2

图 2 排队长度估计模型构建和验证流程图
Fig.2 Construction and validation flowchart of queue length estimation model
2.1. 可观测队列的排队长度估计模型
可观测队列的排队长度
2.1.1. 队列排队长度的粗略估计
定位到某车道队列中距停车线最远的ICV,获取该车的位置和速度信息. 为了研究方便,将其转化为相应的排队长度(排队车辆数)进行计算,队列排队长度粗略估计结果如下:
式中:
式(2)决定排队长度估计的初始值,其中包含2个参数
式中:
根据交通流的基本关系图,在排队过程中,车头间距和速度存在线性关系[23]:
式中:
所有车辆的平均速度无法获取,因为HDVs速度无法获取. ICVs的平均速度
联合式(2)、(4)和(5)可以得到
式(6)涉及2个未知参数A和B,因为本研究假设ICVs随机混合在混合队列中,ICVs和HDVs的平均速度相近,即
对于参数A和B,采集信号交叉口的车辆排队数据并构建数据集
式中:
2.1.2. 基于概率统计的队尾长度修正模型
当渗透率
图 3

式中:
观察第0列,可以发现排队车辆可能占不满车道,那么式(9)无法估计第0列至少有一辆ICV的概率. Shahrbabaki等[23]利用概率统计和排列组合的方式得到了第0列ICV的概率,其假设第0列的车辆数为
基于概率统计定理,可以得到:
1)如果在第0列中至少有一辆ICV,排队长度估计没有误差,概率为
2)如果在第0列中没有ICV,但在第1列中至少有一辆,则估计存在1辆车的误差,概率为
3)以此类推,如果在第
为了验证队尾位置误差修正函数的可信性,分别以车道数
表 1 队列误差概率
Tab.1
| 条件 | ||||||
| G=0 | G=1 | G=2 | G=3 | G=4 | G=5 | |
| 0.16 | 0.23 | 0.17 | 0.12 | 0.09 | 0.06 | |
| 0.31 | 0.34 | 0.17 | 0.09 | 0.05 | 0.02 | |
| 0.44 | 0.37 | 0.13 | 0.04 | 0.01 | 0.01 | |
| 0.56 | 0.35 | 0.07 | 0.02 | 0.00 | 0.00 | |
| 0.66 | 0.30 | 0.04 | 0.00 | 0.00 | 0.00 | |
| 0.20 | 0.28 | 0.18 | 0.12 | 0.08 | 0.05 | |
| 0.37 | 0.37 | 0.15 | 0.06 | 0.03 | 0.01 | |
| 0.51 | 0.37 | 0.09 | 0.02 | 0.01 | 0.00 | |
| 0.63 | 0.32 | 0.04 | 0.01 | 0.00 | 0.00 | |
| 0.73 | 0.25 | 0.02 | 0.00 | 0.00 | 0.00 | |
表1列出了根据概率误差函数计算出的
以此得到队尾位置误差修正函数,如下:
利用式(8)~ (10)进行简化,最终得到队尾位置误差修正函数:
利用
式中:
利用式(13)估计排队长度,并不依赖实时排队信息和先验信息,也不需要检测器就可以实现排队长度估计.
2.2. 不可观测队列排队长度估计模型
不可观测队列的排队长度
式中:
基于贝叶斯定理,公式的推导过程如下:
式中:
根据式(15)~(18)可以得到,不可观测队列的排队长度关于
式中:
2.3. 渗透率估计模型构建
在交叉口各进口道的混合队列中,每一辆车为ICV的概率是相同的,为渗透率
式中:
式(21)的左右两侧都是关于
3. 模型验证
数据采集地点为西安市未央路-凤城七路交叉口,如图4所示,黄色方框内是本研究的排队队列. 对数据进行处理与分析,获得排队队列的车辆数.
图 4

图 5

表 2 排队长度调查数据
Tab.2
| 开始时间 | ||||||
| 14:30 | 167 | 46 | 46 | 5.76 | 5.71 | 5.70 |
| 18:20 | 167 | 43 | 46 | 9.49 | 10.19 | 10.47 |
3.1. 渗透率估计
根据式(21)可以看出,渗透率与ICVs的数量、
表 3 渗透率估计结果
Tab.3
| 777 | 156 | 621 | 20.07 | 19.03 |
3.2. 排队长度估计结果分析
将车辆队列分为
式中:
为了更准确地描述结果,在每个时段设置3个随机种子(seed8、seed10和seed12)来随机表示路网的ICVs分布情况,以验证模型的准确性和鲁棒性. 本研究中提到的MAE和MAPE数据均为统计周期内排队队列MAE和MAPE的平均值. 以seed8为例,如图6(a)、(b)表示在统计周期内非高峰时段和高峰时段每个队列的估计误差,Q为统计周期内的队列数. 如表4所示为基于本研究模型的估计排队长度. 表中,
图 6

图 6 基于本研究模型的非高峰和高峰时段MAPE
Fig.6 MAPE during off-peak and peak hours based on proposed model
表 4 基于本研究模型的估计排队长度
Tab.4
| 时段 | seed | MAE | A-MAE | MAPE /% | A-MAPE /% | ||||
| 14:30— 16:30 (非高峰) | 8 | 5.63 | 5.63 | 4.53 | 4.46 | 1.10 | 1.17 | 19.61 | 20.86 |
| 10 | 5.63 | 4.31 | 1.32 | 23.38 | |||||
| 12 | 5.63 | 4.53 | 1.10 | 19.58 | |||||
| 18:20— 20:20 (高峰) | 8 | 10.03 | 10.03 | 8.84 | 8.59 | 1.19 | 11.83 | 14.33 | |
| 10 | 10.03 | 8.58 | 1.45 | 1.44 | 14.46 | ||||
| 12 | 10.03 | 8.36 | 1.67 | 16.68 |
3.3. 变渗透率的排队长度估计分析
为了进一步验证渗透率
图 7

图 7
基于本研究模型的非高峰和高峰时段MAPE(
Fig.7
MAPE during off-peak and peak hours based on proposed model (
表 5 不同渗透率下基于本研究模型的非高峰时段估计排队长度
Tab.5
| MAE | MAPE/% | ||||
| 10 | 5.63 | 3.98 | 1.65 | 29.35 | 9.90 |
| 20 | 5.63 | 4.08 | 1.54 | 27.47 | 18.28 |
| 30 | 5.63 | 4.21 | 1.41 | 25.09 | 29.60 |
| 50 | 5.63 | 4.92 | 0.70 | 12.48 | 54.24 |
| 80 | 5.63 | 5.07 | 0.55 | 9.89 | 78.63 |
| 90 | 5.63 | 5.24 | 0.38 | 6.90 | 92.02 |
表 6 不同渗透率下基于本研究模型的高峰时段估计排队长度
Tab.6
| MAE | MAPE/% | ||||
| 10 | 10.03 | 7.37 | 2.66 | 26.50 | 10.12 |
| 20 | 10.03 | 7.86 | 2.17 | 21.65 | 21.36 |
| 30 | 10.03 | 8.14 | 1.89 | 18.85 | 28.64 |
| 50 | 10.03 | 9.31 | 0.72 | 7.16 | 50.95 |
| 80 | 10.03 | 9.73 | 0.30 | 3.03 | 79.59 |
| 90 | 10.03 | 9.88 | 0.15 | 1.45 | 90.51 |
3.4. 模型对比
文献[21]提出了基于贝叶斯定理的估计方法来估计信号交叉口的排队长度,与本研究提出的排队估计模型不同的是该方法估计
以
图 8
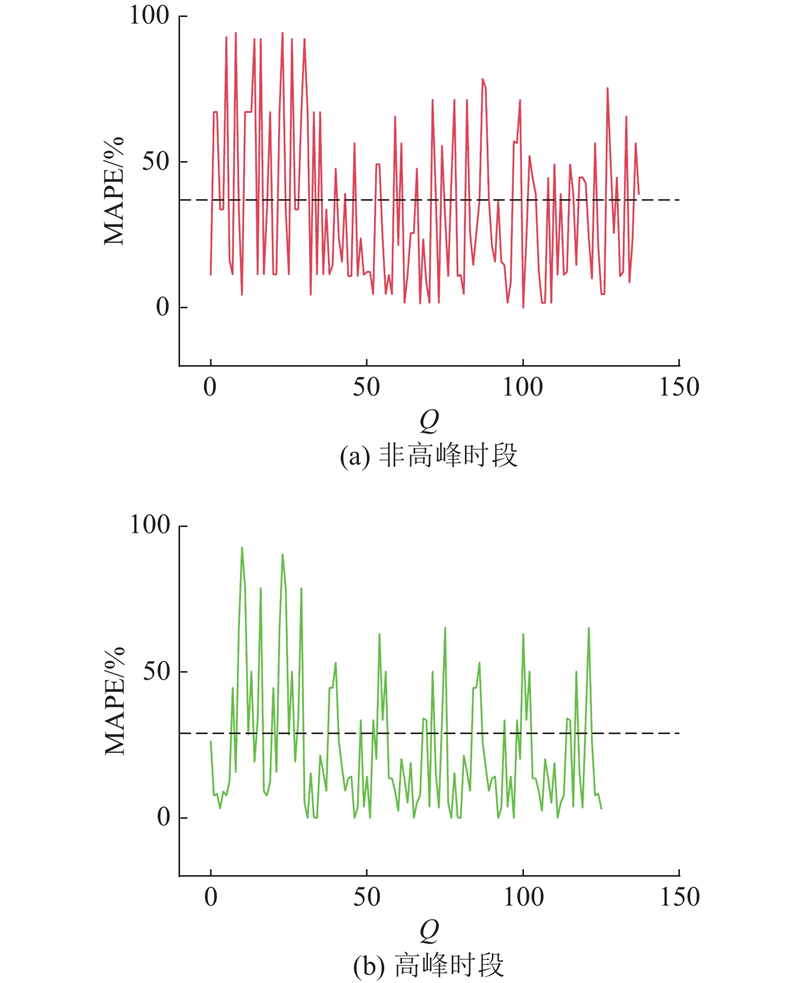
图 8
基于贝叶斯定理的非高峰和高峰时段MAPE(
Fig.8
MAPE during off-peak and peak hours based on Bayesian theorem (
表 7 不同渗透率下基于贝叶斯定理的非高峰时段估计排队长度
Tab.7
| MAE | MAPE/% | ||||
| 10 | 5.63 | 8.99 | 3.36 | 59.68 | 9.90 |
| 20 | 5.63 | 7.71 | 2.08 | 36.91 | 18.28 |
| 30 | 5.63 | 4.06 | 1.67 | 29.72 | 29.60 |
| 50 | 5.63 | 6.87 | 1.24 | 22.06 | 54.24 |
| 80 | 5.63 | 6.68 | 1.05 | 18.65 | 78.63 |
| 90 | 5.63 | 6.63 | 1.00 | 17.85 | 92.02 |
表 8 不同渗透率下基于贝叶斯定理的高峰时段估计排队长度
Tab.8
| MAE | MAPE/% | ||||
| 10 | 10.03 | 6.55 | 3.48 | 34.66 | 10.12 |
| 20 | 10.03 | 7.11 | 2.92 | 29.11 | 21.36 |
| 30 | 10.03 | 12.45 | 2.42 | 24.08 | 28.64 |
| 50 | 10.03 | 9.39 | 0.64 | 6.42 | 50.95 |
| 80 | 10.03 | 9.80 | 0.23 | 2.33 | 79.59 |
| 90 | 10.03 | 9.92 | 0.11 | 1.05 | 90.51 |
总体来说,基于贝叶斯定理的估计方法所得到的估计排队长度的变化趋势和本研究模型的保持一致,即,估计精度随着渗透率的增加而降低,且在高峰时段的估计精度较高.
为了更加清晰直观地展示和对比不同渗透率、不同估计方法以及不同时段对排队长度估计的MAPE的影响情况,如图9所示展示了不同条件下本研究模型和基于贝叶斯定理的模型估计排队长度的MAPE变化情况. 可以看出:1)随着渗透率的升高,MAPE下降,预测的准确性提高;2)同种预测方法下的不同数据样本的对比表明,高峰时段的MAPE较非高峰时段的较小,预测精度较高;3)不同预测方法下的相同数据样本的对比表明,与基于贝叶斯定理的模型相比,所提模型估计的MAPE较小,预测精度较高;4)所提模型无论是在非高峰和高峰时段,还是低渗透率和高渗透率条件下,均优于贝叶斯估计模型,估计结果较准确.
图 9

图 9 不同变量下本研究模型和贝叶斯模型的MAPE
Fig.9 MAPE of proposed model and Bayesian theorem model with different variables
4. 结 论
(1)提出基于概率统计和贝叶斯定理的ICVs和HDVs混合交通流排队长度估计模型,将车辆排队队列分为可观测队列和不可观测队列进行估计,推导出排队长度与网联车位置和速度、排队队列的频率和渗透率的关系式,并采用迭代计算的方式估计渗透率.
(2)所提模型解决了现有模型依赖先验信息(利用历史车辆信息来确定车辆的到达分布以及渗透率)的不足,在没有先验信息的条件下就可以实现对排队长度的估计,并且在求解渗透率时采用迭代计算的方式来精确地估计渗透率,进而解决现有模型中渗透率估计困难的问题.
(3)通过设置随机种子来随机模拟车辆排队的分布状态,实现了对不同渗透率和不同数据集的条件下模型估计精度的分析,并与基于贝叶斯定理的排队长度估计模型对比,分析结果表明本研究模型有效提高了交叉口车辆队列的排队长度估计精度.
本研究所提模型仍存在不足,后续将继续从以下几个方面进行进一步研究:整合不同因素对排队长度估计结果的影响,考虑信号控制交叉口绿灯时间不同对排队长度的影响;本研究对象为直行车道排队长度估计,后续将扩展至直行和左转混合车道的排队长度估计;本研究场景为单点交叉口,后续将研究多个交叉口联动对排队长度估计的影响.
参考文献
基于网联车辆轨迹数据的周期排队长度估计
[J].DOI:10.3969/j.issn.1001-7372.2021.07.012 [本文引用: 1]
Cycle-based queue length estimation based on connected vehicle trajectory data
[J].DOI:10.3969/j.issn.1001-7372.2021.07.012 [本文引用: 1]
基于轨迹数据的信号交叉口排队长度估计
[J].DOI:10.3969/j.issn.1671-1815.2022.21.050 [本文引用: 1]
Queue length of signal intersection based on trajectory data
[J].DOI:10.3969/j.issn.1671-1815.2022.21.050 [本文引用: 1]
Queue profile estimation in congested urban networks with probe data
[J].DOI:10.1111/mice.12095 [本文引用: 1]
基于GPS数据的信号交叉口实时排队长度估算
[J].DOI:10.3969/j.issn.1009-6744.2016.06.011 [本文引用: 1]
Real-time queue length estimation for signalized intersections using GPS data
[J].DOI:10.3969/j.issn.1009-6744.2016.06.011 [本文引用: 1]
基于单截面低频检测数据的信号交叉口排队长度估计
[J].DOI:10.3963/j.issn.1674-4861.2018.01.008 [本文引用: 1]
Estimation of queuing length at signalized intersections using low-frequency point detector data
[J].DOI:10.3963/j.issn.1674-4861.2018.01.008 [本文引用: 1]
Sampled trajectory data-driven method of cycle-based volume estimation for signalized intersections by hybridizing shockwave theory and probability distribution
[J].
车辆轨迹数据驱动的道路交叉口排队长度探测
[J].DOI:10.3969/j.issn.1008-844X.2022.03.042 [本文引用: 1]
Queue length detection of road intersection based on vehicle trajectory
[J].DOI:10.3969/j.issn.1008-844X.2022.03.042 [本文引用: 1]
基于轨迹数据的过饱和信号路口排队长度分析
[J].
Analysis of queue length at oversaturated signal intersections based on trajectory data
[J].
Estimating queue length under connected vehicle technology: using probe vehicle, loop detector, and fused data
[J].DOI:10.1177/0361198113235600103 [本文引用: 1]
Effect of stop line detection in queue length estimation at traffic signals from probe vehicles data
[J].DOI:10.1016/j.ejor.2012.10.035 [本文引用: 1]
Queue length estimation from probe vehicles at isolated intersections: estimators for primary parameters
[J].DOI:10.1016/j.ejor.2016.01.040 [本文引用: 1]
Estimation of queue lengths, probe vehicle penetration rates, and traffic volumes at signalized intersections using probe vehicle trajectories
[J].DOI:10.1177/0361198119856340 [本文引用: 1]
A Bayesian approach for estimating vehicle queue lengths at signalized intersections using probe vehicle data
[J].DOI:10.1016/j.trc.2019.10.006 [本文引用: 1]
On the estimation of connected vehicle penetration rate based on single-source connected vehicle data
[J].DOI:10.1016/j.trb.2019.06.003 [本文引用: 1]
Fuzing license plate recognition data and vehicle trajectory data for lane-based queue length estimation at signalized intersections
[J].DOI:10.1080/15472450.2020.1732217 [本文引用: 1]
Maximum likelihood estimation of probe vehicle penetration rates and queue length distributions from probe vehicle data
[J].
Various methods for queue length and traffic volume estimation using probe vehicle trajectories
[J].DOI:10.1016/j.trc.2019.07.008 [本文引用: 2]
基于联网车辆轨迹数据的交叉口排队长度估计方法
[J].DOI:10.3969/j.issn.1001-7372.2022.03.019 [本文引用: 1]
Queue length estimation and accuracy assessment method for intersections based on trajectory data
[J].DOI:10.3969/j.issn.1001-7372.2022.03.019 [本文引用: 1]
A data fusion approach for real-time traffic state estimation in urban signalized links
[J].DOI:10.1016/j.trc.2018.05.020 [本文引用: 2]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}