


本文链接:
锅炉水冷壁表面在使用过程中会产生积灰、结焦、磨损和腐蚀等情况,严重时会发生爆管等事故,因此必须对水冷壁进行定期清扫和检修[1]。当前,大多数火力发电厂采用人工清扫和检修的方式,需要在锅炉内搭建脚手架[2],导致清扫和检测周期长,对工人的健康安全也有危害。采用水冷壁机器人进行清扫和检测,可以大大提高工作效率,并将工人从恶劣的环境中解脱出来。目前,水冷壁机器人的吸附方式以永磁吸附和电磁吸附为主。如:李博等[3-4]设计的水冷壁检测机器人采用的是永磁吸附方式,马孝栋等[5]设计的一款检测端可横向调节的水冷壁机器人采用的是电磁吸附方式。但是,采用永磁吸附方式的水冷壁机器人的吸附力不能改变,在机器人完成爬壁作业后很难从壁面取下。电磁轮的吸附力虽然可以改变,但是工作时需要一直通电,当意外断电时极易发生危险,安全性较差。针对以上问题,作者设计了一款新型水冷壁机器人。该机器人采用电永磁轮吸附,在水冷壁面作业时能够实现落腿时磁力产生、抬腿时磁力消失。电永磁轮只需一个持续几毫秒的强电流脉冲来充磁与退磁,轮子吸附在壁面时无需持续通电,线圈几乎不发热,能耗低,使用寿命长,安全性高;每个轮子可提供150 N左右的吸力,且结构简单,体积小,质量小。
1 新型水冷壁机器人的结构与工作原理
火力发电厂的锅炉水冷壁由水管焊接而成,水管之间用鳍片连接。由于水冷壁表面凹凸不平,水冷壁机器人除了具备壁面吸附和移动作业这两大基本功能外,还需有越障能力,而因为要携带清扫和检测设备,还要求有负重能力。现有的水冷壁机器人多通过磁吸附产生摩擦力的方式来平衡机器人的自重,但机器人的负重能力都不强。因此,作者提出了采用绳索吊装机器人本体的方案,如图1所示。在水冷壁面的左上角和右上角分别放置一个吊绳机构,机器人本体上装有电永磁轮。其竖向行走通过吊绳机构收/放绳实现,此时电永磁轮吸附在壁面上;横向行走通过机器人本体实现,此时吊绳机构用于平衡机器人重力。
图1
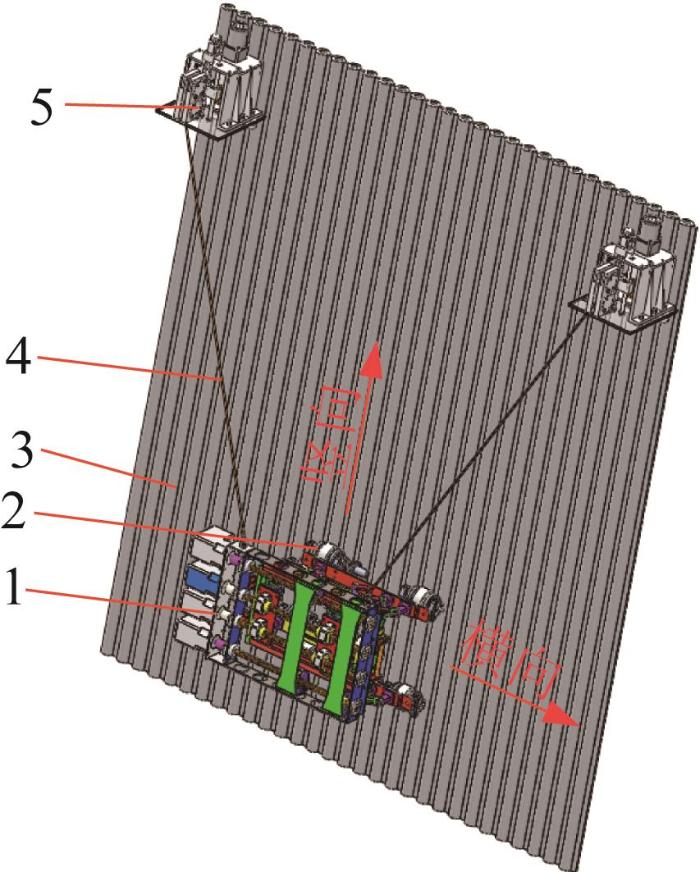
图1
机器人工作方案示意
1—机器人本体;2—电永磁轮;3—水冷壁面;
4—绳索;5—吊绳机构。
Fig.1
Schematic of robot working scheme
图2
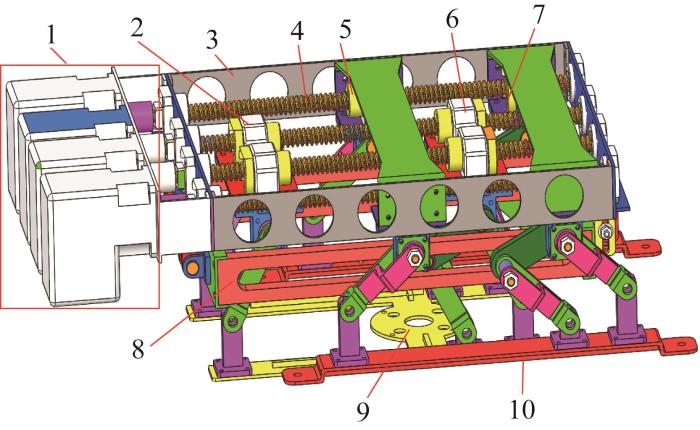
图2
机器人本体结构
1—电机组;2—内腿滑块(有丝杠螺母);3—外框架;4—丝杠;5—外腿滑块(有丝杠螺母);6—内腿滑块(无丝杠螺母);7—外腿滑块(无丝杠螺母);8—内框架;9—内腿组件;10—外腿组件。
Fig.2
Body structure of robot
机器人本体结构简图如图4所示。图中,OB为控制外腿后滑块移动的电机,OF为控制外腿前滑块移动的电机,IB为控制内腿后滑块移动的电机,IF为控制内腿前滑块移动的电机。
图3
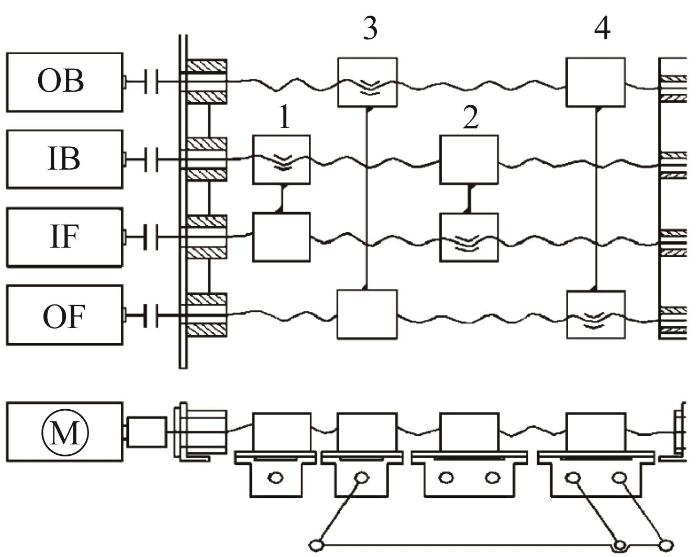
图3
机器人本体结构简图
1—内腿后滑块;2—内腿前滑块;3—外腿后滑块;4—外腿前滑块。
Fig.3
Schematic diagram of body structure of robot
图4
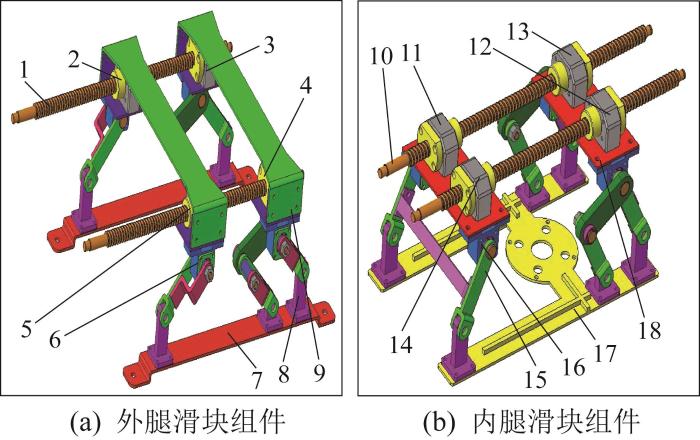
图4
机器人外腿和内腿组件
1—丝杠;2—后滑块(有丝杠螺母);3—前滑块(无丝杠螺母);4—前滑块(有丝杠螺母);5—后滑块(无丝杠螺母);6—轴承座;7—外足;8—拉杆;9—滑块连接板;10—丝杠;11—后滑块(有丝杠螺母);12—前滑块(有丝杠螺母);13—前滑块(无丝杠螺母);14—后滑块(无丝杠螺母);15—拉杆;16—轴承座;17—内足;18—滑块连接板。
Fig.4
Assembly of outer leg and inter leg of robot
机器人外腿和内腿组件如图4所示。外滑块连接板底端与足部通过拉杆联接。整体上机器人内腿组件采用与外腿组件相同的结构。
2 电永磁轮的结构与工作原理
机器人本体在横向移动时需要抬腿与落腿。为了保证机器人的吸附稳定性和行走灵活性,要求在机器人落腿时磁力产生,抬腿时磁力消失。针对这一要求,本文提出了一种电永磁轮。
2.1 电永磁轮结构
电永磁轮的结构如图5所示(省略了螺栓和螺母等紧固件),主要由左右轴、左右磁极块、尼龙套、线圈和铝镍钴永磁体等组成。右轴和右磁极块均开有中心通孔以方便线圈外接导线;左右磁极块的材料为电工纯铁DT4,左右轴则由铝合金制成;位于轮子中心轴线上的永磁体呈圆柱形,材料采用矫顽力低的铝镍钴,牌号为LNG52;线圈由漆包铜线制成,缠绕在永磁体上,用于给永磁体充/退磁;磁极块、尼龙套、线圈、永磁体之间的间隙用环氧树脂胶填充。电永磁轮需搭配电滑环使用。
图5
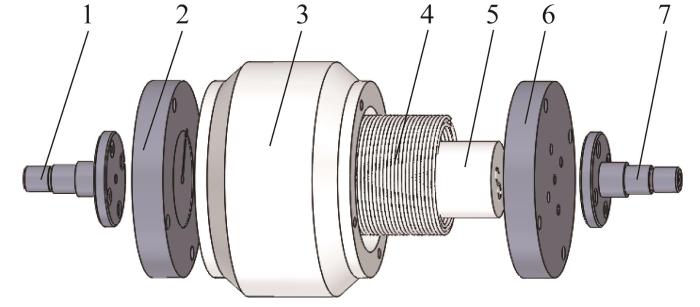
图5
电永磁轮结构
1—左轴;2—左磁极块;3—尼龙套;4—线圈;5—铝镍钴永磁体;6—右磁极块;7—右轴。
Fig.5
Structure of electric permanent magnet wheel
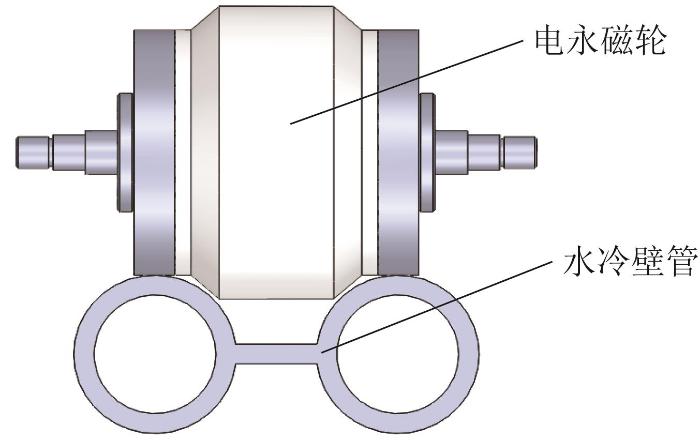
电永磁轮行走在2根水冷壁管上,如图6所示。尼龙套起到轮子的定位与导向作用,防止轮子左右偏移。电永磁轮作业时,永磁体与左右磁极块、水冷壁管组成磁路。
图6
2.2 电永磁轮工作原理
电永磁轮的工作原理为:线圈缠绕在LNG52永磁体上组成螺线管;当线圈通入正向电流时,产生正向磁场,对永磁体充磁;当线圈通入反向电流时,产生反向磁场,对永磁体退磁。
2.2.1 永磁体充/退磁过程
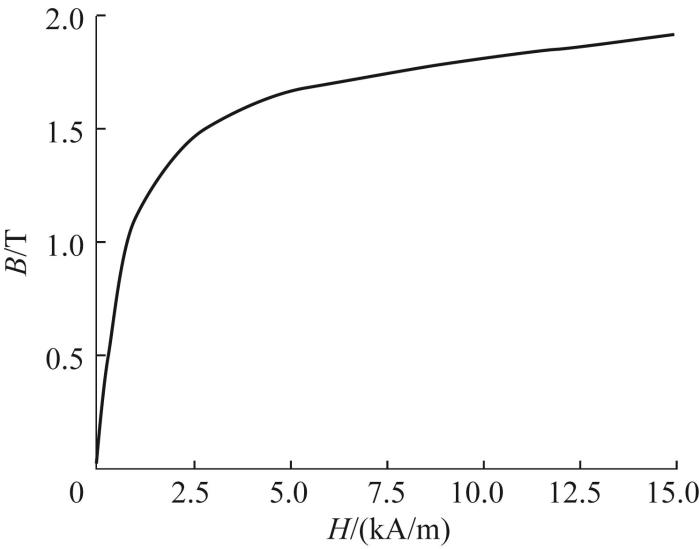
图7
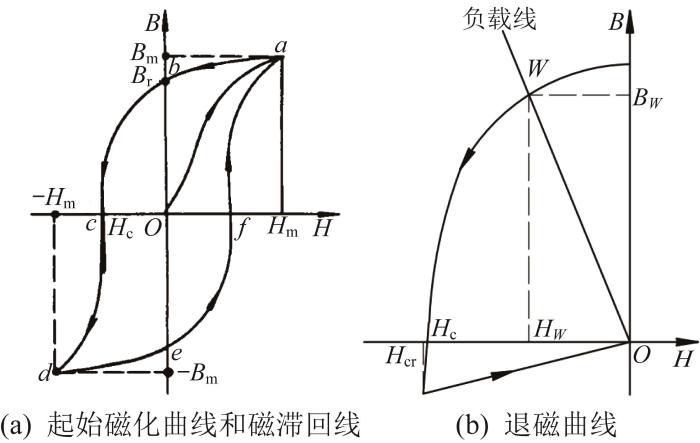
图7
永磁体的起始磁化曲线、磁滞回线和退磁曲线
Fig.7
Initial magnetization curve, hysteresis loop and demagnetization curve of permanent magnet
当外加磁场按Hm
退磁曲线如图7(b)所示。在磁路中永磁体有一工作点(W点),当外部施加直流电而产生反向磁场时,永磁体工作点会沿B—H曲线向下移动。当施加的反向磁场的强度大于Hc后,永磁体被反向充磁。若对永磁体施加一个略大于Hc的反向磁场Hcr,去除外部磁场后,磁性材料的回复特性会使其磁感应强度回到0。这是永磁体退磁过程。
2.2.2 通电螺线管磁场
图8
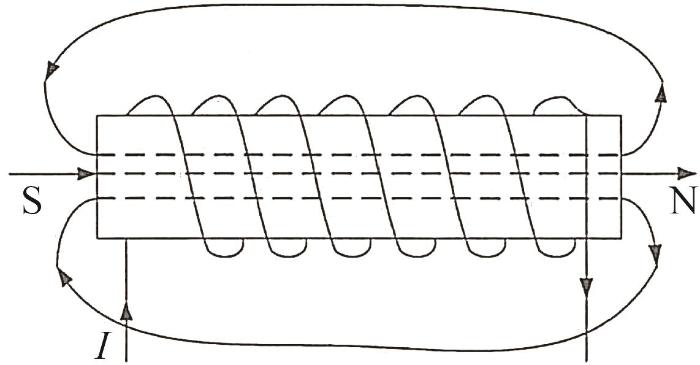
多层密绕螺线管内部中心点产生的磁场强度为[9]:
式中:N为线圈匝数,I为导线中通入的电流,R1为螺线管内径,R2为线管外径,
3 电永磁轮充/退磁仿真及实验验证
3.1 充磁仿真
充磁仿真是为了研究在饱和充磁时水冷壁管所受的吸力,仿真过程如下。
1)建立模型。尼龙套和左右轴的相对磁导率与空气的相等,因此其用空气替代。线圈由线径为1 mm的漆包铜线紧密缠绕184匝而成,铜线层厚为4 mm,在Maxwell软件中可用空心圆柱体来替代。电永磁轮模型的尺寸如图9所示。
图9
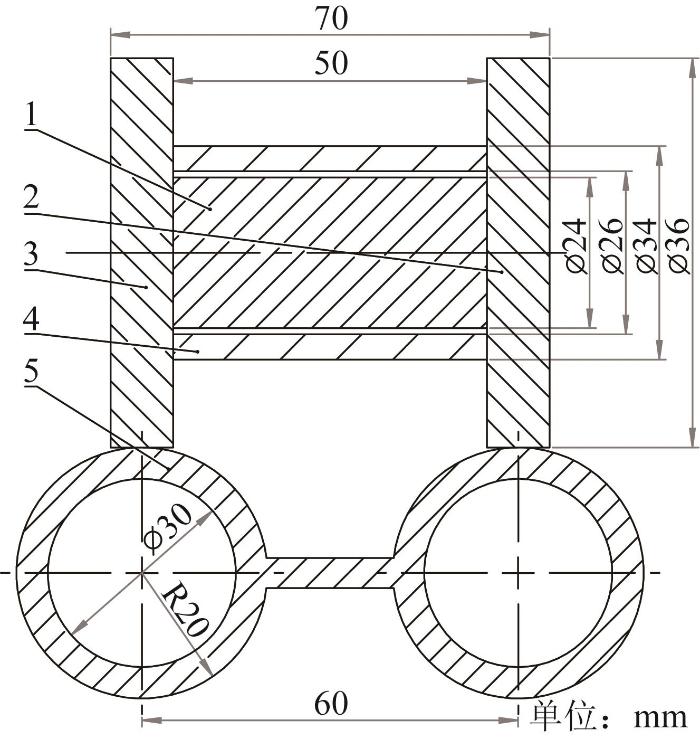
图9
电永磁轮模型尺寸
1—LNG52永磁体;2—右磁极块;3—左磁极块;4—线圈;5—水冷壁管。
Fig.9
Model dimension of electric permanent magnet wheel
表1 电永磁轮的材料参数
Table 1
图10
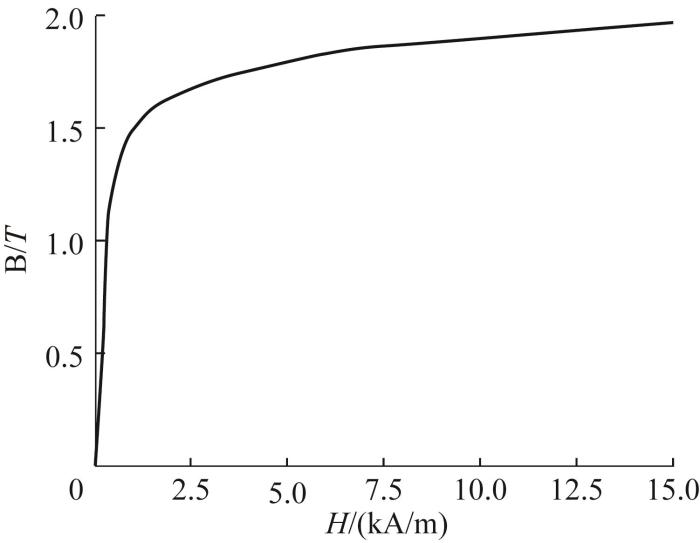
图11
3)添加边界条件。
4)添加需求解的参数,设置求解器[16]。将水冷壁管所受的力设为需求解的参数。
5)计算并显示结果。电永磁轮饱和充磁仿真结果如图12所示。
图12
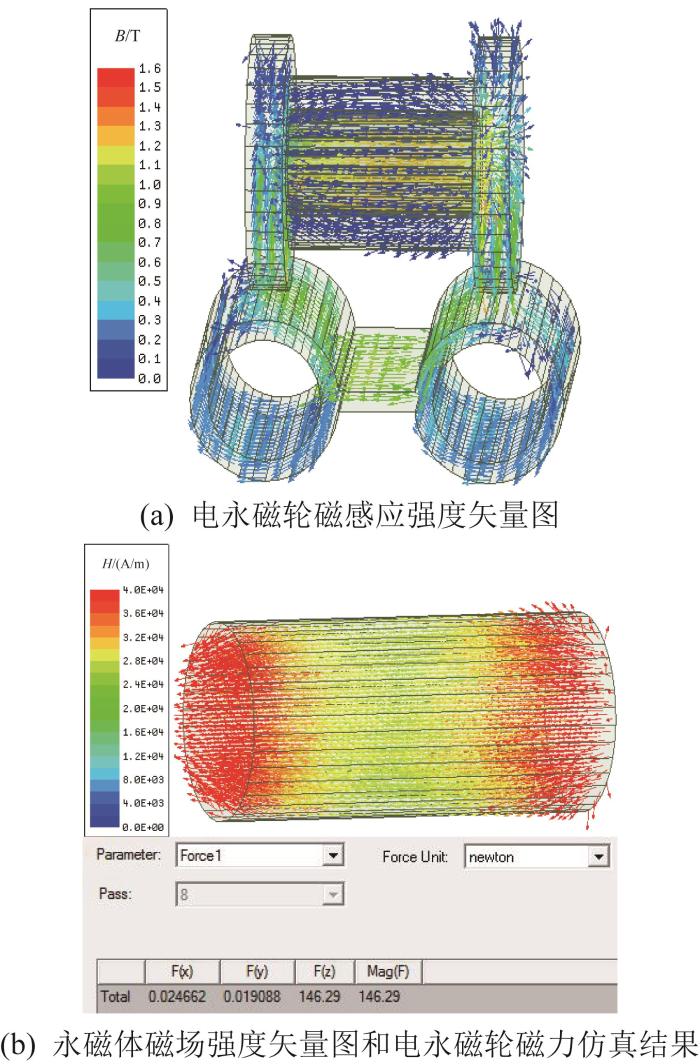
图12
电永磁轮饱和充磁仿真结果
Fig.12
Simulation results of saturation magnetization of electric permanent magnet wheel
由图12(a)可知,电永磁轮在工作时主要有2条磁路。磁路1:LNG52永磁体N极—右磁极块—水冷壁管—左磁极块—LNG52永磁体S极;磁路2:LNG52永磁体N极—右磁极块—空气—左磁极块—LNG52永磁体S极。
由图12(b)可知,在电永磁轮饱和充磁时,LNG52永磁体的磁场强度为两边大、中间小。为了简化分析,取永磁体的中心点作为永磁体的工作点(实际上永磁体各点处的磁场强度或磁感应强度是不相同的,为了便于退磁电流的计算,这里用永磁体中心点作为计算点)。经分析得出,工作点处B=1.21 T,H=-27.80 kA/m,H的方向与B的方向相反。电永磁轮饱和充磁后对水冷壁管的吸力为146.29 N。
LNG52永磁体饱和充磁的磁场强度约为100 kA/m[17],通过
3.2 退磁仿真
在Maxwell软件的退磁模式下,对线圈添加电流激励,将水冷壁管所受的力、LNG52永磁体中心点的B和H设为需求解的参数,并设置瞬态求解器,进行电永磁轮退磁仿真。
正如图7(b)所示,退磁就是使永磁体工作点处的磁场强度为Hcr。由于并不知道Hcr的值,只知道Hcr略大于Hc,可以先用Hc替代Hcr来求出一个退磁电流,然后以该电流为参考,设置一组退磁电流进行仿真,得出使电永磁轮的吸力最小的电流值即可。在3.1节中已经求得永磁体中心点处B=1.21 T,H=-27.80 kA/m,而Hc=-56 kA/m,故需添加的反向外磁场强度为28.2 kA/m,由
图13
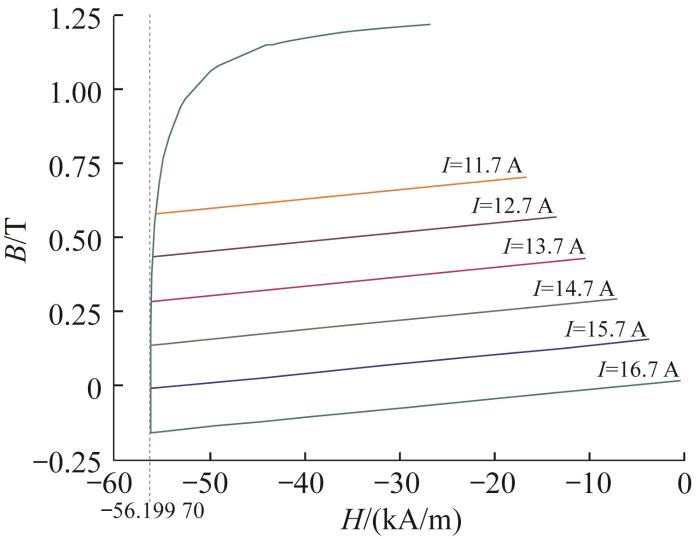
图13
不同电流下永磁体退磁曲线
Fig.13
Demagnetization curves of permanent magnet under different currents
3.3 实验验证
图14
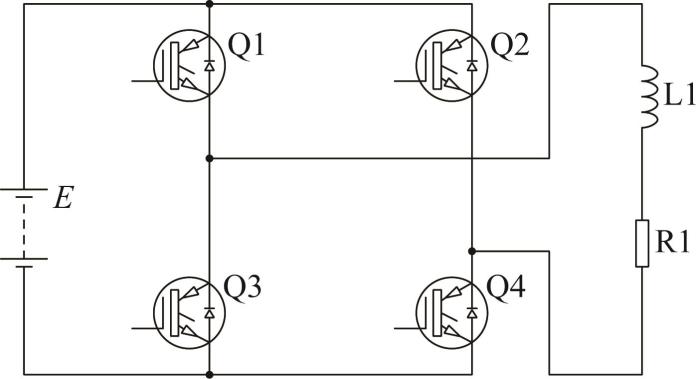
表2 电永磁轮充/退磁实验电路的开关状态
Table 2
| Q1 | Q2 | Q3 | Q4 | 负载状态 |
|---|---|---|---|---|
| 导通 | 断开 | 断开 | 导通 | 充磁 |
| 断开 | 导通 | 导通 | 断开 | 退磁 |
图15

图15
电永磁轮充/退磁实验电路
Fig.15
Magnetization/demagnetization experimental circuit of electric permanent magnet wheel
表3 电永磁轮充磁实验结果
Table 3
| 测量次序 | 电压/V | 电流/A | 吸力/N |
|---|---|---|---|
| 1 | 19.50 | 32.50 | 124.2 |
| 2 | 20.00 | 33.33 | 136.5 |
| 3 | 20.50 | 34.17 | 142.9 |
| 4 | 21.00 | 35.00 | 145.3 |
| 5 | 21.50 | 35.83 | 144.7 |
| 6 | 22.00 | 36.67 | 149.3 |
表4 电永磁轮退磁实验结果
Table 4
| 测量次序 | 电压/V | 电流/A | 吸力/N |
|---|---|---|---|
| 1 | 10.00 | 16.67 | 32 |
| 2 | 10.25 | 17.08 | 26 |
| 3 | 10.50 | 17.50 | 12 |
| 4 | 10.75 | 17.91 | 7 |
| 5 | 11.00 | 18.33 | 8 |
| 6 | 11.25 | 18.75 | 0 |
| 7 | 11.50 | 19.17 | 5 |
| 8 | 11.75 | 19.58 | 14 |
实验中发现,只有当电流大于35.00 A时才能使电永磁轮完全充磁,若继续增大充磁电压,电永磁轮的吸力变化不大。电永磁轮饱和充磁后的吸力约为150 N。当用16.67 A的电流对电永磁轮退磁时,发现轮子仍有一定的吸力,若继续增大退磁电流,轮子吸力呈现先减小后增大的趋势,原因是永磁体在退磁后又被反向充磁了。当退磁电流为18.75 A时,轮子几乎没有吸力。实验测得的充磁电流和退磁电流均比仿真值大,但误差都没有超过3 A,验证了充/退磁仿真的正确性。
4 电永磁轮充/退磁电路设计
永磁体的充/退磁只与充/退磁电流的大小有关,与电流持续时间无关。充/退磁时,线圈中的电流密度会达到几百A/mm2。为了减少发热,必须缩短通电时间,因此采用脉冲电流在线圈中产生脉冲磁场的方法为永磁体充/退磁。本文采用电容放电的方式来产生充/退磁所需的脉冲电流。首先给电容充电,电容存储的电荷量
图16
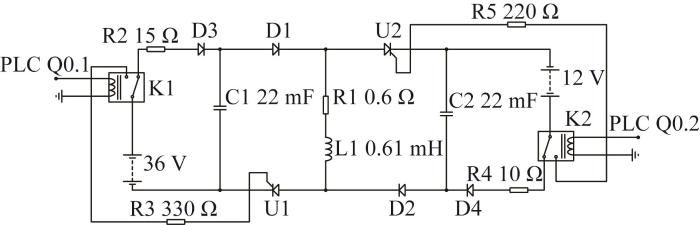
图16
电永磁轮充/退磁电路设计
Fig.16
Design of magnetization/demagnetization circuit of electric permanent magnet wheel
图17
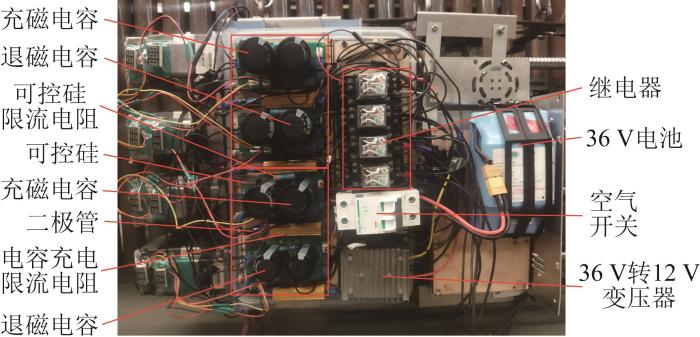
图17
电永磁轮充/退磁电路实物图
Fig.17
Object of magnetization/demagnetization circuit of electric permanent magnet wheel
表5 电永磁轮充/退磁电路的开关状态
Table 5
| K1 | K1 | K2 | K2 | C1 | C2 | 负载状态 |
|---|---|---|---|---|---|---|
| 常闭 | 常闭 | 常开 | 常开 | 充电 | 放电 | 退磁 |
| 常开 | 常开 | 常闭 | 常闭 | 放电 | 充电 | 充磁 |
图18
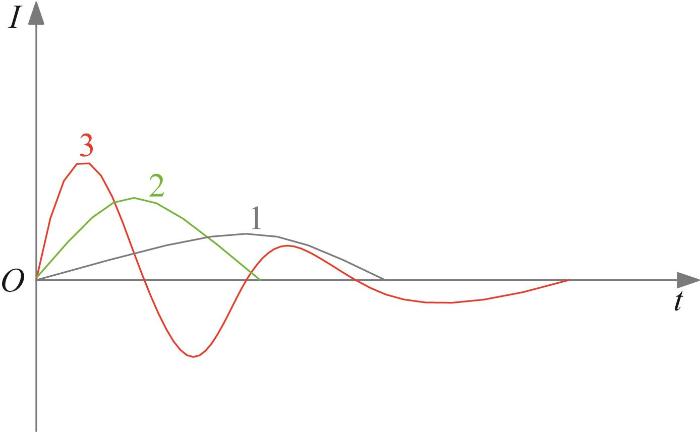
在电容开始放电的初始瞬间,
1)当
2)当
呈波形3的电流脉冲会导致永磁体在充磁(退磁)后又退磁(充磁),故须保证
5 新型水冷壁机器人控制系统设计
图19
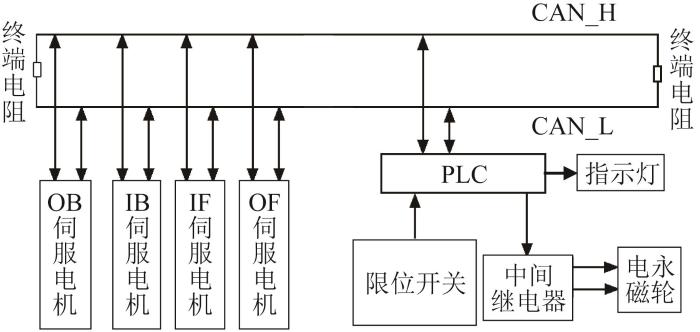
图20
为了使控制系统轻量化,电机选用施耐德公司型号为1A0ILE1F661PB1A0的一体化驱动伺服电机,可与控制电路集成为非常紧凑的单元。控制电路具有绝对编码器的功能,能够实时反馈电机的工作状态,并集成了CANopen通信协议。
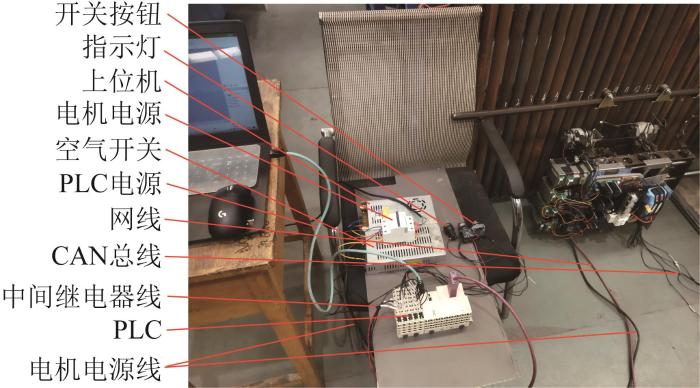
6 新型水冷壁机器人横向行走实验
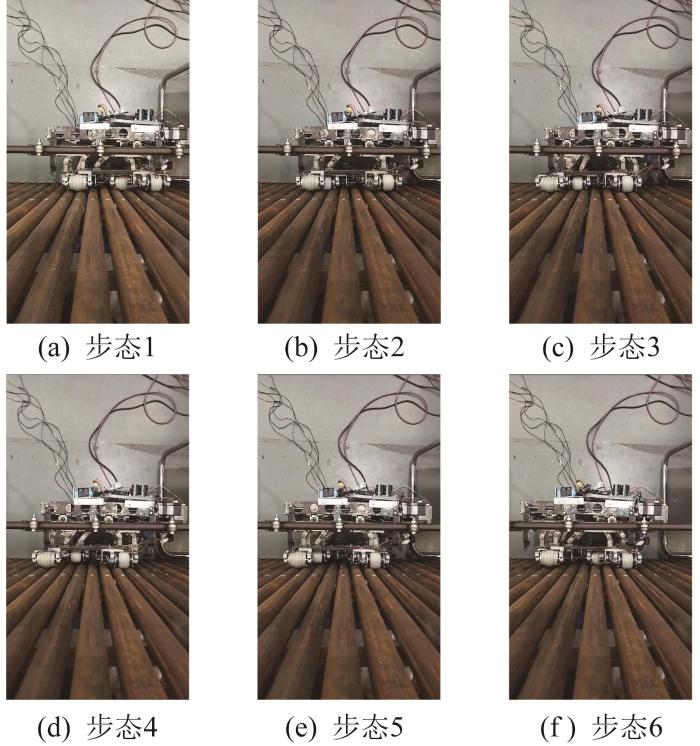
为了验证新型水冷壁机器人的行走效果,进行机器人横向行走实验,观察机器人行走的协同性和稳定性。机器人行走实验现场如图21所示。实验中,滑轮悬挂在横梁上,在滑轮下面用钢丝绳吊装机器人。机器人向前迈步时,滑轮会沿着横梁随着机器人一起前移。
图21
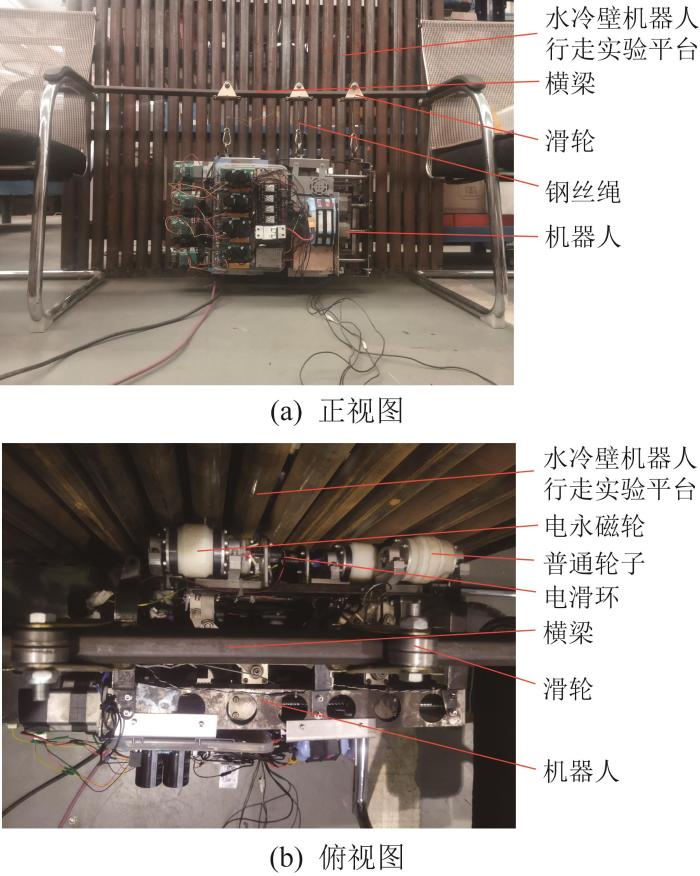
机器人行走过程如图22所示。机器人完成1个爬行周期需执行6个步态。步态1:内腿支撑,外腿抬腿完成,为机器人初始状态,即4个电机处于回零状态,此时内腿上的电永磁轮吸附在壁面上。步态2:内腿支撑行走,外腿前移。步态3:外腿落腿完成,内腿抬腿开始,外腿上的电永磁轮瞬间充磁,外腿吸附在壁面上,内腿上的电永磁轮瞬间退磁,内腿开始脱离壁面,从而保证机器人在行走时一直吸附在壁面上。为了保证外腿落腿时稳定、无冲击,采用了反向落腿的方式。结合图4来说明反向落腿的具体过程:内腿支撑时机器人以速度v向前运动,当滑块3和4前移至距右轴承座10 mm时速度降为0,然后滑块4以速度v相对于机器人框架向后运动,滑块3向后先作加速运动、后作减速运动,当滑块3的速度降为v时,滑块3和4刚好满足落腿所需的位移差的要求,从而完成落腿,这样外腿落腿时相对于壁面的速度为0,从而实现稳定落腿。步态4:外腿支撑行走,内腿抬腿完成。步态5:外腿支撑行走,内腿前移。步态6:内腿反向落腿完成,外腿抬腿开始,内腿上的电永磁轮瞬间充磁,外腿上的电永磁轮瞬间退磁。步态1至步态6构成了机器人步态的一个周期。在整个实验过程中,没有出现机器人从壁面脱离的情况,也没有出现机器人在抬腿和前移的过程中出现卡顿的情况,机器人内、外腿能够协同动作,实现了稳定吸附和灵活运动。机器人的步距是管间距的整数倍,能够始终保证机器人落腿后行走在2根水冷壁管之上,实现了图6所示的行走方案。实验完成后,对电永磁轮退磁,可以很方便地将机器人从壁面分离。另外,由于机器人内框架的限制,机器人内腿的行程比外腿行程短。
图22
7 结 论
1)作者完成了新型水冷壁机器人工作方案的设计,对机器人本体结构进行了描述,并对机器人的电永磁轮进行了结构设计。电永磁轮结构简单,体积小,质量小,可提供150 N的吸力,完全可以满足水冷壁机器人所需吸附力的要求。
2)采用Maxwell软件对电永磁轮充/退磁进行了仿真,并结合实验得到了电永磁轮充/退磁电流和充/退磁后的轮子吸力。设计了电永磁轮充/退磁电路,分析了储能电容给励磁线圈放电的电流激励。
3)设计了机器人本体的控制系统,进行了机器人横向行走实验,验证了内、外腿交替支撑和前移的协同性和稳定性,实现了机器人抬腿时无吸力、落腿时具有可靠的吸力。机器人的横向行走兼具吸附稳定性和运动灵活性,在其完成作业后可对电永磁轮退磁,方便工作人员将机器人从壁面分离。
参考文献
循环流化床锅炉水冷壁的磨损形式和寿命评估
[J].
Wearing mode and lifespan evaluation of water wall of circulating fluidized bed boiler
[J].
机器人技术在燃煤电站系统中的应用探索
[J].
Application of robot technology in coal-fired power station system
[J].
锅炉水冷壁检测机器人系统设计和控制策略研究
[D].
Design and control strategy of boiler water wall detection robot system
[D].
锅炉水冷壁爬壁机器人运动机构及吸附方法研究
[D].
Research on motion mechanism and adsorption method of wall climbing robot for boiler water wall
[D].
一种具有检测端可调节的磁吸附水冷壁检测机器人
A magnetic adsorption water-cooled wall detection robot with adjustable detection end
罐体作业爬壁机器人的控制关键技术研究
[D].
Research on key control technology of wall-climbing robot for tank operation
[D].
爬壁机器人结构优化及控制系统研究
[D].
Research on structure optimization and control system of wall climbing robot
[D].
电控永磁吸盘控制器的研究
[D].
Research on controller of electronically controlled permanent magnet sucker
[D].
强电流脉冲控制的现代永磁起重吸盘的研究与设计
[D].
Research and design of modern permanent magnet lifting sucker controlled by strong current pulse
[D].
脉冲电永磁铁成套系统的设计与实现
[D].
Design and implementation of a complete system of pulsed electropermanent magnet
[D].
铜板电控永磁压边拉深成形工艺研究
[D].
Study on deep drawing process of copper plate with electric control permanent magnet blank holder
[D].
电控永磁吸盘电磁场分析及应用于拉深工艺的初步研究
[D].
Electromagnetic field analysis of electronically controlled permanent magnet sucker and its application in deep drawing process
[D].
轮式悬磁吸附爬壁机器人研究
[D].
Research on wheeled wall-climbing robot with suspended magnetic adsorption
[D].
关于在铝镍钴永磁合金测试中材料矫顽力与磁化场关系的实验报告
[J].
Experimental report on the relationship between coercivity and magnetization field in the test of Al-Ni-Co permanent magnet alloy
[J].
基于电控永磁技术的变力夹紧系统研究
[D].
Research on variable force clamping system based on electronically controlled permanent magnet technology
[D].
锅炉水冷壁面检测机器人本体设计与实验研究
[D].
Ontology design and experimental study of boiler water wall inspection robot
[D].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}