新型水冷壁机器人设计及其电永磁轮研究
Design of new water-cooled wall robot and research of its electro permanent magnet wheel
新型水冷壁机器人设计及其电永磁轮研究 |
| 张博洋,冯永利,黄金凤,黄宝旺 |
|
Design of new water-cooled wall robot and research of its electro permanent magnet wheel |
| Boyang ZHANG,Yongli FENG,Jinfeng HUANG,Baowang HUANG |
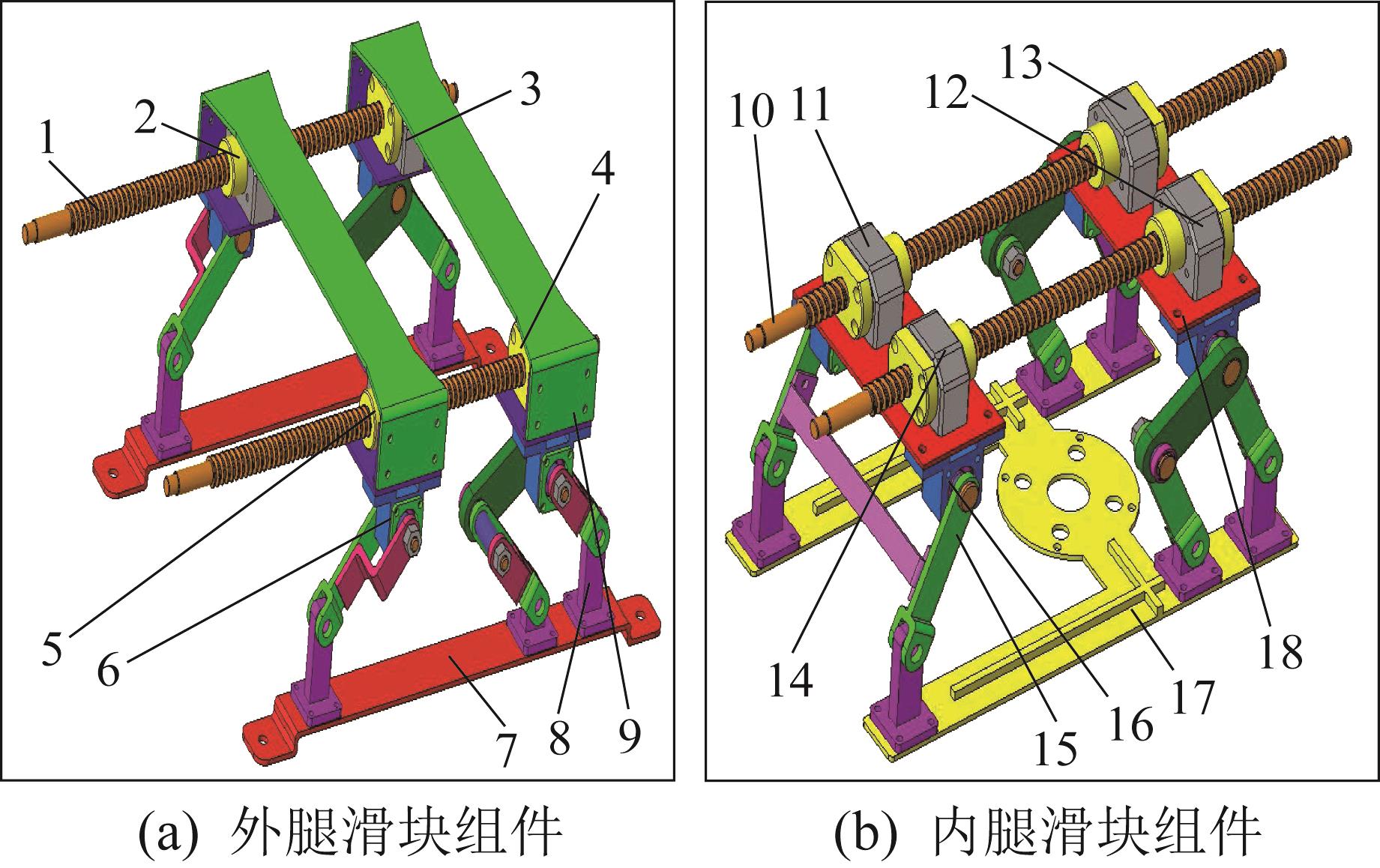
| 图4 机器人外腿和内腿组件1—丝杠;2—后滑块(有丝杠螺母);3—前滑块(无丝杠螺母);4—前滑块(有丝杠螺母);5—后滑块(无丝杠螺母);6—轴承座;7—外足;8—拉杆;9—滑块连接板;10—丝杠;11—后滑块(有丝杠螺母);12—前滑块(有丝杠螺母);13—前滑块(无丝杠螺母);14—后滑块(无丝杠螺母);15—拉杆;16—轴承座;17—内足;18—滑块连接板。 |
| Fig.4 Assembly of outer leg and inter leg of robot |
|
|