|
|
|
| Predefined time adaptive sliding mode control for flexible space robot |
Yicheng LIU( ),Jialing YANG,Rui TANG,Jing CHENG ),Jialing YANG,Rui TANG,Jing CHENG |
| College of Electrical Engineering, Sichuan University, Chengdu 610065, China |
|
|
|
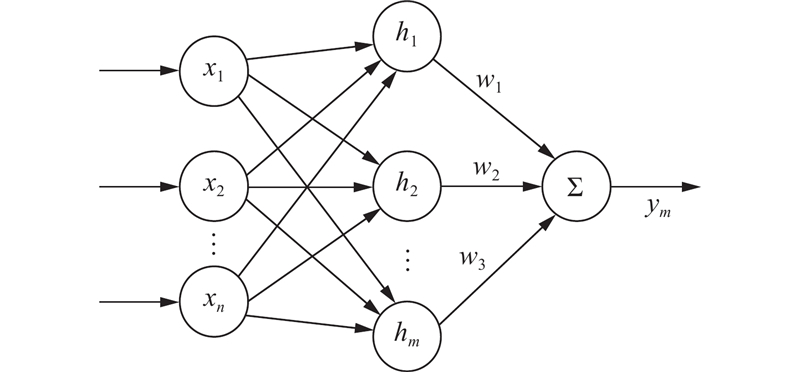
Abstract An adaptive sliding mode control method based on predefined time was proposed for the trajectory tracking control problem of a flexible space robot with typical nonlinear characteristics. The dynamic model of the multi-stage cable-driven flexible space robot was established by using the constant curvature method and Lagrangian formulation. A sliding mode controller based on predefined time theory was designed. A radial basis function (RBF) neural network was employed to compensate for modeling errors and external disturbances in the multi-stage cable-driven flexible space robot system. The convergence of trajectory tracking error within predefined time was proven using Lyapunov theory. The effectiveness of the model and controller was verified through numerical simulations. Comparative analysis against fixed-time controllers and uncompensated controllers showed that the proposed controller facilitated faster convergence of system trajectory error.
|
|
Received: 26 December 2023
Published: 11 February 2025
|
|
|
| Fund: 清华大学横向协作项目(HG2020153). |
柔性空间机器人预定义时间自适应滑模控制
针对具有典型非线性特性的多段线驱动柔性空间机器人的轨迹跟踪控制问题,提出基于预定义时间的自适应滑模控制方法. 基于常曲率方法和拉格朗日法,建立多段线驱动柔性空间机器人的动力学模型. 设计基于预定义时间理论的滑模控制器,利用径向基函数(RBF)神经网络补偿多段线驱动柔性空间机器人系统的建模误差和外界干扰. 利用Lyapunov理论,证明轨迹跟踪误差可以在预定义时间内收敛. 通过数值仿真验证了模型和控制器的有效性,与固定时间控制器和无补偿的控制器相比,所提出的控制器使系统轨迹误差具有更快的收敛速度.
关键词:
柔性空间机器人,
预定义时间稳定性,
径向基函数神经网络,
轨迹跟踪,
滑模控制
|
|
| [1] |
BASMADJI F L, SEWERYN K, SASIADEK J Z Space robot motion planning in the presence of nonconserved linear and angular momenta[J]. Multibody System Dynamics, 2020, 50 (1): 71- 96
doi: 10.1007/s11044-020-09753-x
|
|
|
| [2] |
GIORDANO A M, OTT C, ALBU-SCHÄFFER A, et al Coordinated control of spacecraft's attitude and end-effector for space robots[J]. IEEE Robotics and Automation Letters, 2019, 4 (2): 2108- 2115
doi: 10.1109/LRA.2019.2899433
|
|
|
| [3] |
WU Y H, YU Z C, LI C Y, et al Reinforcement learning in dual-arm trajectory planning for a free-floating space robot[J]. Aerospace Science and Technology, 2020, 98: 105657
doi: 10.1016/j.ast.2019.105657
|
|
|
| [4] |
ZHANG Y C, LI P C, QUAN J L, et al Progress, challenges, and prospects of soft robotics for space applications[J]. Advanced Intelligent Systems, 2023, 5 (3): 2200071
doi: 10.1002/aisy.202200071
|
|
|
| [5] |
DIAN S Y, ZHU Y Q, XIANG G F, et al A novel disturbance-rejection control framework for cable-driven continuum robots with improved state parameterizations[J]. IEEE Access, 2022, 10: 91545- 91556
doi: 10.1109/ACCESS.2022.3202934
|
|
|
| [6] |
AYALA-CARRILLO J E, PARRA-VEGA V, OLGUíN-DíAZ E, et al Cascade control for robust tracking of continuum soft robots with finite-time convergence of pneumatic system[J]. IEEE Control Systems Letters, 2022, 7: 577- 582
|
|
|
| [7] |
JIN R Y, ROCCO P, GENG Y H Observer-based fixed-time tracking control for space robots in task space[J]. Acta Astronautica, 2021, 184: 35- 45
doi: 10.1016/j.actaastro.2021.04.002
|
|
|
| [8] |
SÁNCHEZ-TORRES J D, GÓMEZ-GUTIÉRREZ D, LÓPEZ E, et al A class of predefined-time stable dynamical systems[J]. IMA Journal of Mathematical Control and Information, 2018, 35 (Suppl.1): i1- i29
|
|
|
| [9] |
YE D, ZOU A M, SUN Z W Predefined-time predefined-bounded attitude tracking control for rigid spacecraft[J]. IEEE Transactions on Aerospace and Electronic Systems, 2021, 58 (1): 464- 472
|
|
|
| [10] |
JIN R Y, GENG Y H, CHEN X Q Predefined-time control for free-floating space robots in task space[J]. Journal of the Franklin Institute, 2021, 358 (18): 9542- 9560
doi: 10.1016/j.jfranklin.2021.09.030
|
|
|
| [11] |
LIU Y C, YAN W, ZHANG T, et al Trajectory tracking for a dual-arm free-floating space robot with a class of general nonsingular predefined-time terminal sliding mode[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2021, 52 (5): 3273- 3286
|
|
|
| [12] |
KIM S J, JIN M, SUH J H A study on the design of error-based adaptive robust RBF neural network back-stepping controller for 2-DOF snake robot’s head[J]. IEEE Access, 2023, 11: 23146- 23156
doi: 10.1109/ACCESS.2023.3249346
|
|
|
| [13] |
ZHANG Y, WANG F, ZHANG J Adaptive finite-time tracking control for output-constrained nonlinear systems with non-strict-feedback structure[J]. International Journal of Adaptive Control and Signal Processing, 2020, 34 (4): 560- 574
doi: 10.1002/acs.3099
|
|
|
| [14] |
HE C, WU J, DAI J Y, et al Fixed-time adaptive neural tracking control for a class of uncertain nonlinear pure-feedback systems[J]. IEEE Access, 2020, 8: 28867- 28879
doi: 10.1109/ACCESS.2020.2972353
|
|
|
| [15] |
胡忠华, 徐文福, 杨太玮, 等 刚柔混合双臂空间机器人抓持-操作协同规划[J]. 宇航学报, 2022, 43 (10): 1311
HU Zhonghua, XU Wenfu, YANG Taiwei, et al Coordinated grasp and operation planning for hybrid rigid flexible dual arm space robot[J]. Journal of Astronautics, 2022, 43 (10): 1311
|
|
|
| [16] |
RONE W S, BEN-TZVI P Continuum robot dynamics utilizing the principle of virtual power[J]. IEEE Transactions on Robotics, 2013, 30 (1): 275- 287
|
|
|
| [17] |
胡海燕, 王鹏飞, 孙立宁, 等 线驱动连续型机器人的运动学分析与仿真[J]. 机械工程学报, 2010, 46 (19): 1- 8
HU Haiyan, WANG Pengfei, SUN Lining, et al Kinematic analysis and simulation for cable-driven continuum robot[J]. Journal of Mechanical Engineering, 2010, 46 (19): 1- 8
doi: 10.3901/JME.2010.19.001
|
|
|
| [18] |
丁萌, 顾秀涛, 郑先杰, 等 基于模糊补偿的连续型空间机械臂预定时间控制[J]. 浙江大学学报: 工学版, 2022, 56 (6): 1175- 1180
DING Meng, GU Xiutao, ZHENG Xianjie, et al Predefined-time control of continuum space manipulator based on fuzzy compensation[J]. Journal of Zhejiang University: Engineering Science, 2022, 56 (6): 1175- 1180
|
|
|
| [19] |
LIU Y, LI H Y, LU R Q, et al An overview of finite/fixed-time control and its application in engineering systems[J]. IEEE/CAA Journal of Automatica Sinica, 2022, 9 (12): 2106- 2120
doi: 10.1109/JAS.2022.105413
|
|
|
| [20] |
ASSALI E A Predefined-time synchronization of chaotic systems with different dimensions and applications[J]. Chaos, Solitons and Fractals, 2021, 147: 110988
doi: 10.1016/j.chaos.2021.110988
|
|
|
| [21] |
WU C H, YAN J G, SHEN J H, et al Predefined-time attitude stabilization of receiver aircraft in aerial refueling[J]. IEEE Transactions on Circuits and Systems II: Express Briefs, 2021, 68 (10): 3321- 3325
|
|
|
| [22] |
LI H J, CAI Y L On SFTSM control with fixed‐time convergence[J]. IET Control Theory and Applications, 2017, 11 (6): 766- 773
doi: 10.1049/iet-cta.2016.1457
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|