|
|
|
| Trajectory tracking and stability control of high-speed autonomous vehicle |
Yu-qiong WANG1( ),Song GAO1,*(),Yu-hai WANG2,3,Yi XU1,Dong GUO1,Ying-chao ZHOU1 ),Song GAO1,*(),Yu-hai WANG2,3,Yi XU1,Dong GUO1,Ying-chao ZHOU1 |
1. School of Transportation and Vehicle Engineering, Shandong University of Technology, Zibo 255000, China
2. State Key Laboratory of Automotive Simulation and Control, Jilin University, Changchun 130025, China
3. Qingdao Automotive Research Institute, Jilin University, Qingdao 266043, China |
|
|
|
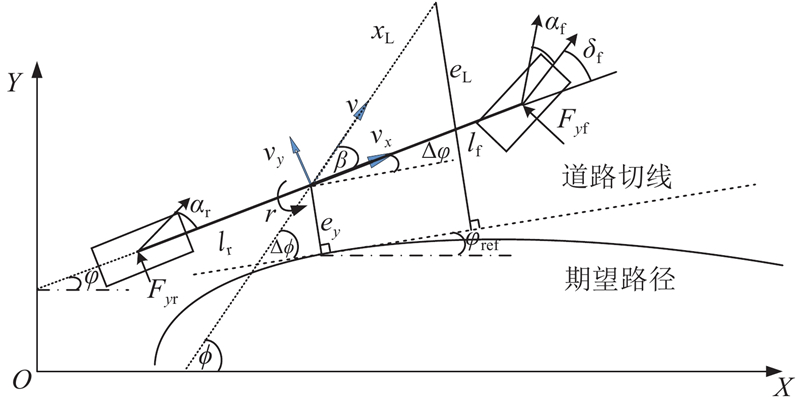
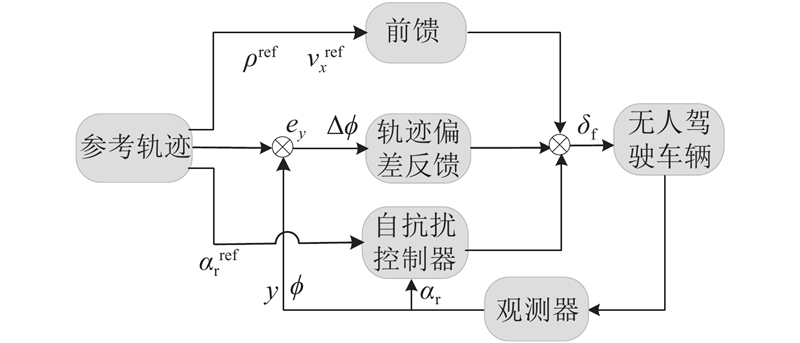
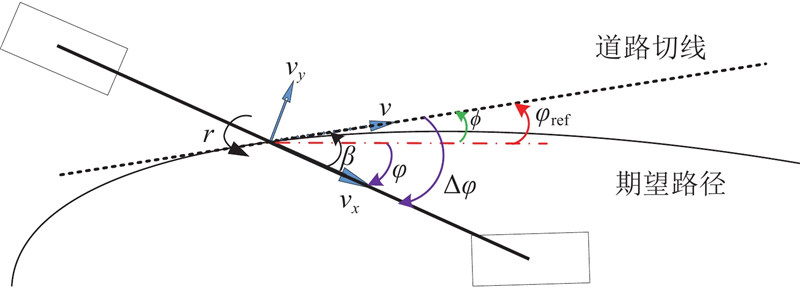
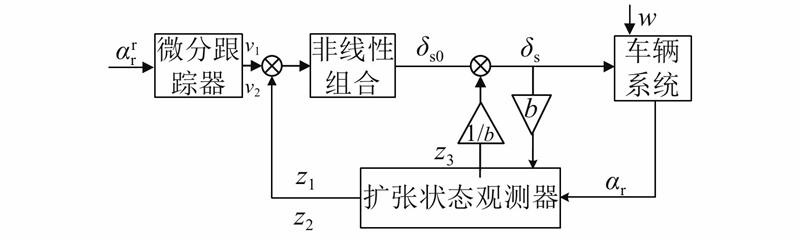
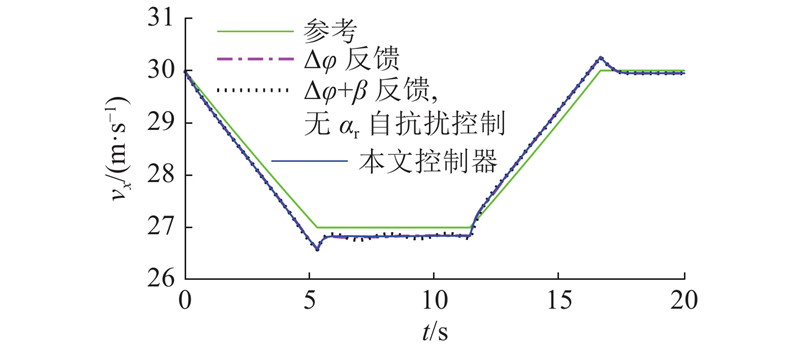
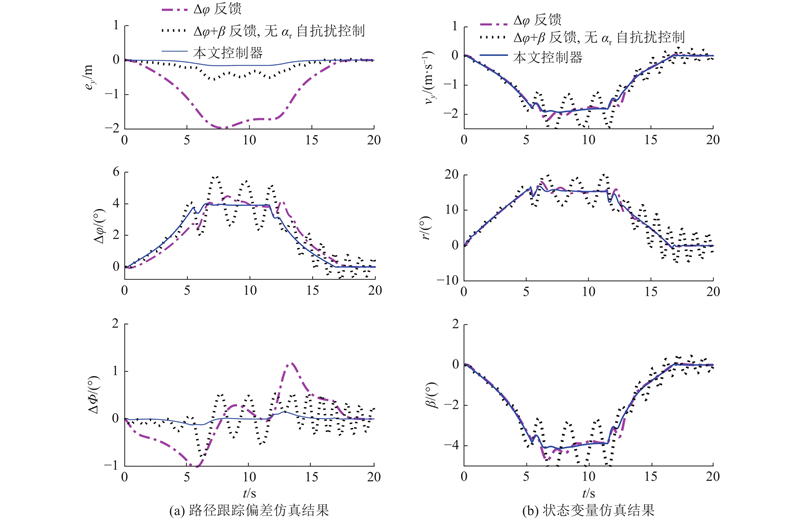
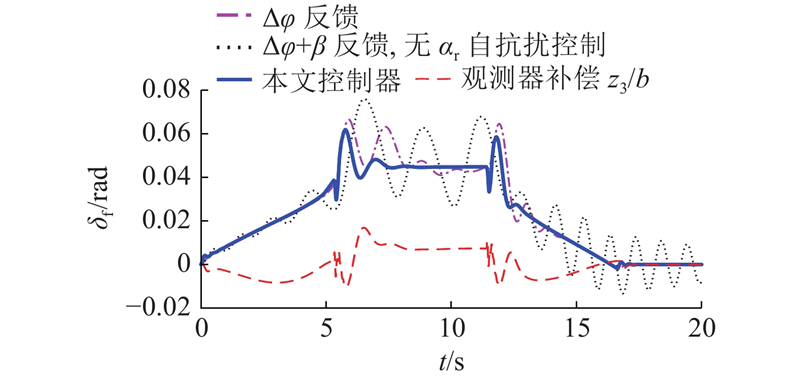
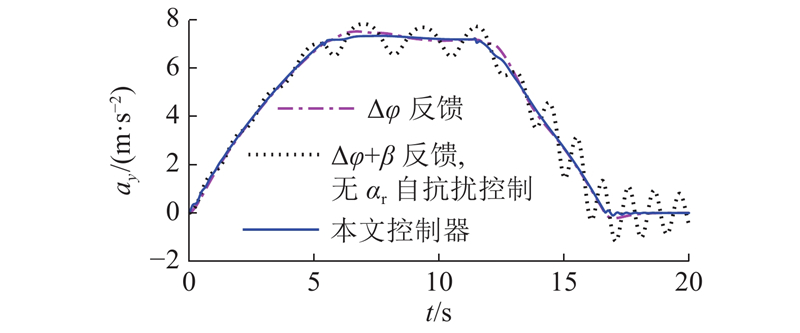
Abstract A lateral control algorithm combining feedforward-feedback control and active disturbance rejection control (ADRC) was proposed aiming at the difficulty in ensuring the trajectory tracking accuracy and stability of high-speed autonomous vehicles. The feedforward steady-state front wheel steering angle was calculated by the vehicle longitudinal velocity and road curvature information, and the vehicle sideslip angle was introduced into the heading angle. Then the vehicle heading angle deviation and lateral deviation were used as the reference values for feedback control. The feedforward-feedback control was employed to improve vehicle transient trajectory tracking performance. Then the ADRC controller was designed, and the un-modeled dynamics along with the internal and external disturbances were estimated by the extended state observer. The sideslip angle of rear wheel was controlled near the reference value to compensate the front wheel steering angle by ADRC, which improved the steering stability of the autonomous vehicle and the robustness of the controller. The simulation results under different working conditions show that the proposed method can ensure the autonomous vehicle to stably track the desired trajectory with lower tracking deviation and has good robustness against parameter uncertainties and external disturbances.
|
|
Received: 24 October 2020
Published: 27 October 2021
|
|
|
| Fund: 国家自然科学基金资助项目(51905320);山东省重大科技创新工程资助项目(2019JZZY010911) |
|
Corresponding Authors:
Song GAO
E-mail: wangyuqiong@sdut.edu.cn;gaosong@sdut.edu.cn
|
高速无人驾驶车辆轨迹跟踪和稳定性控制
针对高速无人驾驶车辆运动控制过程中轨迹跟踪精度和稳定性难以同时保障的问题,提出综合前馈-反馈及自抗扰控制(ADRC)补偿相结合的横向控制算法. 通过车速和道路曲率信息计算前馈稳态前轮转向角,将质心侧偏角引入航向偏差,以车辆航向角偏差和侧向偏差作为参考量进行反馈控制,通过前馈-反馈控制提升瞬态轨迹跟踪性能. 设计自抗扰控制器,通过扩张状态观测器对未建模动态和内外界干扰进行估计,通过将后轮侧偏角控制在参考值附近来补偿前轮转角,提升无人驾驶车辆的转向稳定性和控制器的鲁棒性. 不同工况下的仿真结果表明,利用该方法可以保证高速无人驾驶车辆稳定地跟踪期望路径行驶,轨迹跟踪偏差较小,对车辆参数变化和外界干扰具有较强的鲁棒性.
关键词:
高速无人驾驶车辆,
轨迹跟踪,
转向稳定性,
后轮侧偏角,
扩张状态观测器,
自抗扰控制(ADRC)
|
|
| [1] |
陈虹, 郭露露, 宫洵, 等 智能时代的汽车控制[J]. 自动化学报, 2020, 46 (7): 1313- 1332
CHEN Hong, GUO Lu-lu, GONG Xun, et al Automotive control in intelligent era[J]. Acta Automatica Sinica, 2020, 46 (7): 1313- 1332
|
|
|
| [2] |
熊璐, 杨兴, 卓桂荣, 等 无人驾驶车辆的运动控制发展现状综述[J]. 机械工程学报, 2020, 56 (10): 143- 159
XIONG Lu, YANG Xing, ZHUO Gui-rong, et al Review on motion control of autonomous vehicles[J]. Journal of Mechanical Engineering, 2020, 56 (10): 143- 159
|
|
|
| [3] |
HU C, WANG R, YAN F, et al Should the desired heading in path following of autonomous vehicles be the tangent direction of the desired path?[J]. IEEE Transactions on Intelligent Transportation Systems, 2015, 2015 (6): 1- 11
|
|
|
| [4] |
RAJAMANI R. Vehicle dynamics and control [M]. 2th ed. Berlin: Springer, 2012: 50-60.
|
|
|
| [5] |
KAPANIA N R, GERDES J C Design of a feedback-feedforward steering controller for accurate path tracking and stability at the limits of handling[J]. Vehicle System Dynamics, 2015, 53 (12): 1- 18
|
|
|
| [6] |
任殿波, 崔胜民, 吴杭哲 车道保持预瞄控制及其稳态误差分析[J]. 汽车工程, 2016, 38 (259): 64- 71
REN Dian-bo, CUI Sheng-min, WU Hang-zhe Preview control for lane keeping and its steady-state error analysis[J]. Automotive Engineering, 2016, 38 (259): 64- 71
|
|
|
| [7] |
KRITAYAKIRANA K, GERDES J C Autonomous vehicle control at the limits of handling[J]. International Journal of Vehicle Autonomous Systems, 2012, 10 (4): 271- 296
doi: 10.1504/IJVAS.2012.051270
|
|
|
| [8] |
NI J, ZHOU J, HU J, et al Robust path following control at driving/handling limits of an autonomous electric racecar[J]. IEEE Transactions on Vehicular Technology, 2019, 68 (6): 5518- 5526
doi: 10.1109/TVT.2019.2911862
|
|
|
| [9] |
吴海东, 司振立 基于线性矩阵不等式的智能车轨迹跟踪控制[J]. 浙江大学学报:工学版, 2020, 54 (1): 110- 117
WU Hai-dong, SI Zhen-li Intelligent vehicle trajectory tracking control based on linear matrix inequality[J]. Journal of Zhejiang University: Engineering Science, 2020, 54 (1): 110- 117
|
|
|
| [10] |
刘凯, 陈慧岩, 龚建伟, 等 高速无人驾驶车辆的操控稳定性研究[J]. 汽车工程, 2019, 41 (5): 514- 521
LIU Kai, CHEN Hui-yan, GONG Jian-wei, et al A research on handling stability of high-speed unmanned vehicles[J]. Automotive Engineering, 2019, 41 (5): 514- 521
|
|
|
| [11] |
辛喆, 陈海亮, 林子钰, 等 智能汽车的路面附着极限横向轨迹跟踪控制[J]. 机械工程学报, 2020, 56 (14): 138- 145
XIN Zhe, CHEN Hai-liang, LIN Zi-yu, et al lateral trajectory following for automated vehicles at handling limits[J]. Journal of Mechanical Engineering, 2020, 56 (14): 138- 145
doi: 10.3901/JME.2020.14.138
|
|
|
| [12] |
陈无畏, 刘翔宇, 黄鹤, 等 考虑路面影响的车辆稳定性控制质心侧偏角动态边界控制[J]. 机械工程学报, 2012, 48 (14): 112- 118
CHEN Wu-wei, LIU Xiang-yu, HUANG He, et al Research on side slip angle dynamic boundary control for vehicle stability control considering the impact of road surface[J]. Journal of Mechanical Engineering, 2012, 48 (14): 112- 118
doi: 10.3901/JME.2012.14.112
|
|
|
| [13] |
熊璐, 曲彤, 冯源, 等 极限工况下车辆行驶的稳定性判据[J]. 机械工程学报, 2015, 51 (10): 103- 111
XIONG Lu, QU Tong, FENG Yuan, et al Stability criterion for the vehicle under critical driving situation[J]. Journal of Mechanical Engineering, 2015, 51 (10): 103- 111
doi: 10.3901/JME.2015.10.103
|
|
|
| [14] |
韩京清 从PID技术到"自抗扰控制"技术[J]. 控制工程, 2002, 9 (3): 13- 18
HAN Jing-qing From PID technology to auto disturbance rejection control technology[J]. Control Engineering of China, 2002, 9 (3): 13- 18
doi: 10.3969/j.issn.1671-7848.2002.03.003
|
|
|
| [15] |
高志强 自抗扰控制思想探究[J]. 控制理论与应用, 2013, 30 (12): 1498- 1510
GAO Zhi-qiang On the foundation of active disturbance rejection control[J]. Control Theory and Applications, 2013, 30 (12): 1498- 1510
doi: 10.7641/CTA.2013.31087
|
|
|
| [16] |
安部正人. 车辆操纵动力学理论与应用M]. 喻凡, 译. 2版. 北京: 机械工业出版社, 2016: 47-48.
|
|
|
| [17] |
BAKKER E, NYBORG L, PACEJKA H B. Tyre modeling for use in vehicle dynamics studies [C]// SAE Paper. Detroit: SAE, 1987.
|
|
|
| [18] |
LIU Q F, CHEN H, HU Y F, et al Modeling and control of the fuel injection system for rail pressure regulation in GDI engine[J]. IEEE/ ASME Transactions on Mechatronics, 2014, 19 (5): 1501- 1513
doi: 10.1109/TMECH.2013.2285716
|
|
|
| [19] |
LI Liang, JIA Gang, RAN Xu, et al A variable structure extended Kalman filter for vehicle sideslip angle estimation on a low friction road[J]. Vehicle System Dynamics, 2014, 52 (2): 280- 308
doi: 10.1080/00423114.2013.877148
|
|
|
| [20] |
施树明, LUPKER H, BREMMER P, 等 基于模糊逻辑的车辆侧偏角估计方法[J]. 汽车工程, 2005, (4): 426- 430
SHI Shu-ming, LUPKER H, BREMMER P, et al Estimation of vehicle side slip angle based on fuzzy logic[J]. Automotive Engineering, 2005, (4): 426- 430
doi: 10.3321/j.issn:1000-680X.2005.04.010
|
|
|
| [21] |
CHENG S, LI L, YAN B, et al Simultaneous estimation of tire side-slip angle and lateral tire force for vehicle lateral stability control[J]. Mechanical Systems and Signal Processing, 2019, 132: 168- 182
doi: 10.1016/j.ymssp.2019.06.022
|
|
|
| [22] |
WU Y, WANG L, ZHANG J, et al Robust vehicle yaw stability control by active front steering with active disturbance rejection controller[J]. Proceedings of the Institution of Mechanical Engineers, Part I: Journal of Systems and Control Engineering, 2019, 233 (9): 1127- 1135
doi: 10.1177/0959651818813515
|
|
|
| [23] |
向辉, 施树明. 车辆运行自组织仿真平台开发[EB/OL]. (2005-04-11). http://www.paper.edu.cn.
XIANG Hui, SHI Shu-ming. The developing of vehicle operation self-organization simulation platform [EB/OL]. (2005-04-11). http://www.paper.edu.cn.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|