|
|
|
| Nonsingular fast terminal sliding model fuzzy control of robotic manipulators |
Ai-guo WU( ),Shao-hua WU,Na DONG ),Shao-hua WU,Na DONG |
| School of Electrical and Information Engineering, Tianjin University, Tianjin 300072, China |
|
|
|
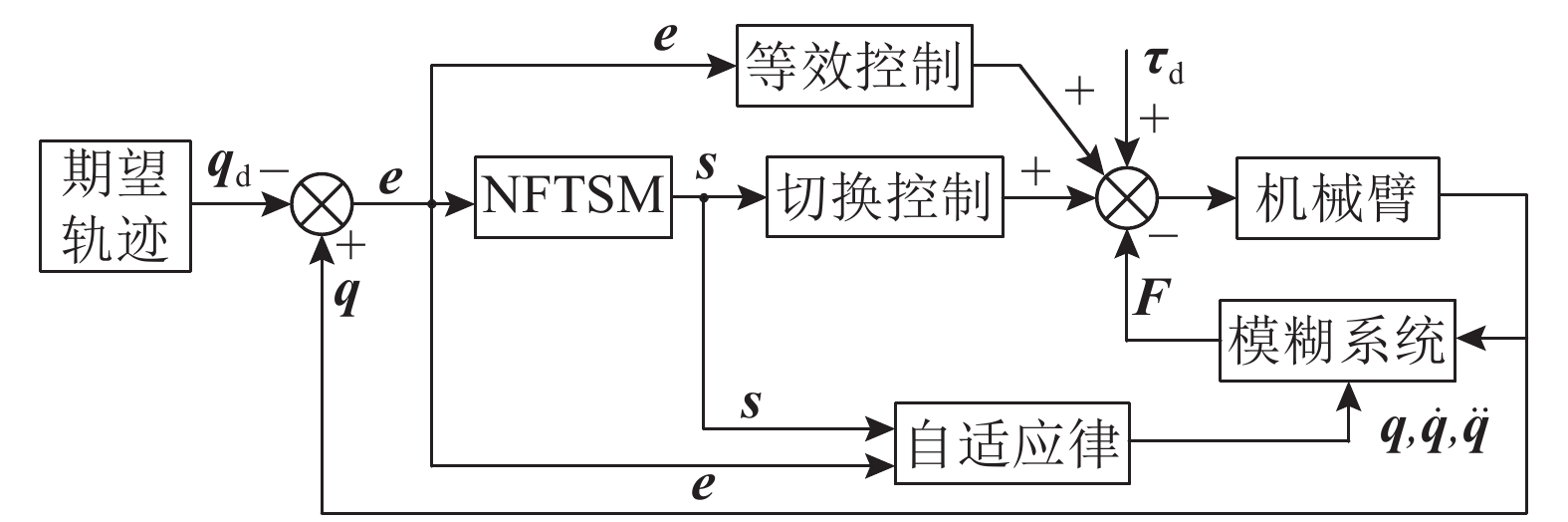
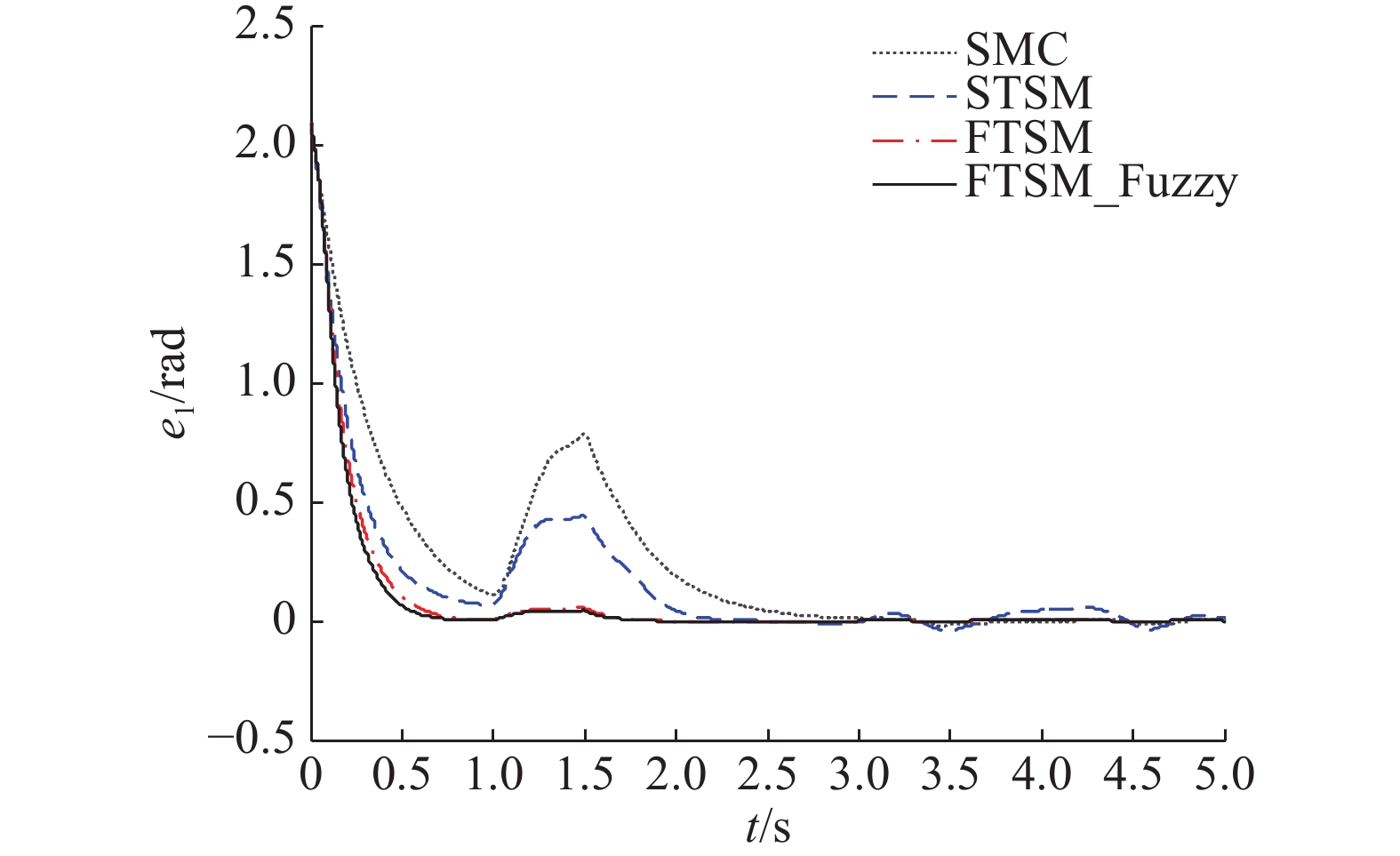
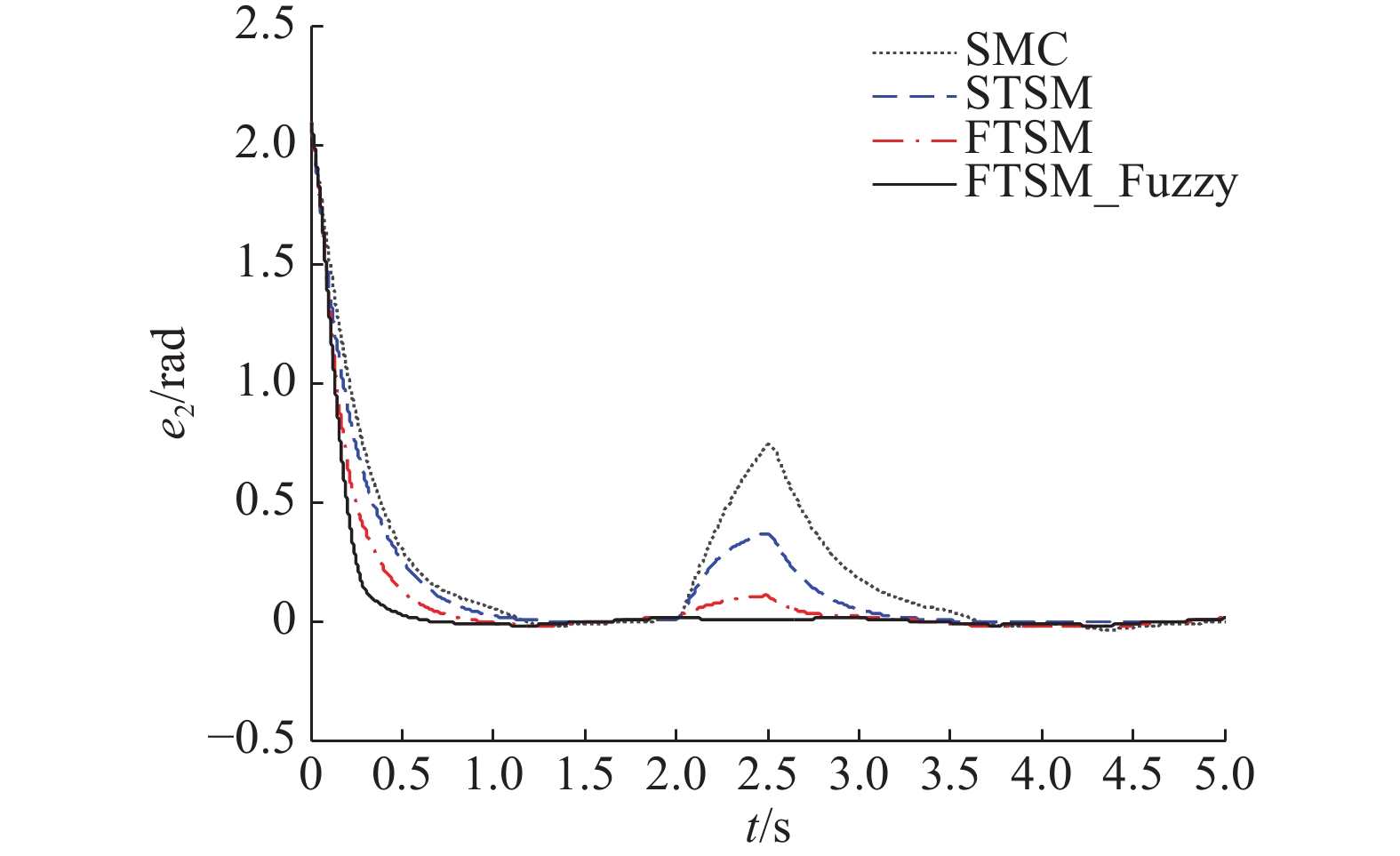
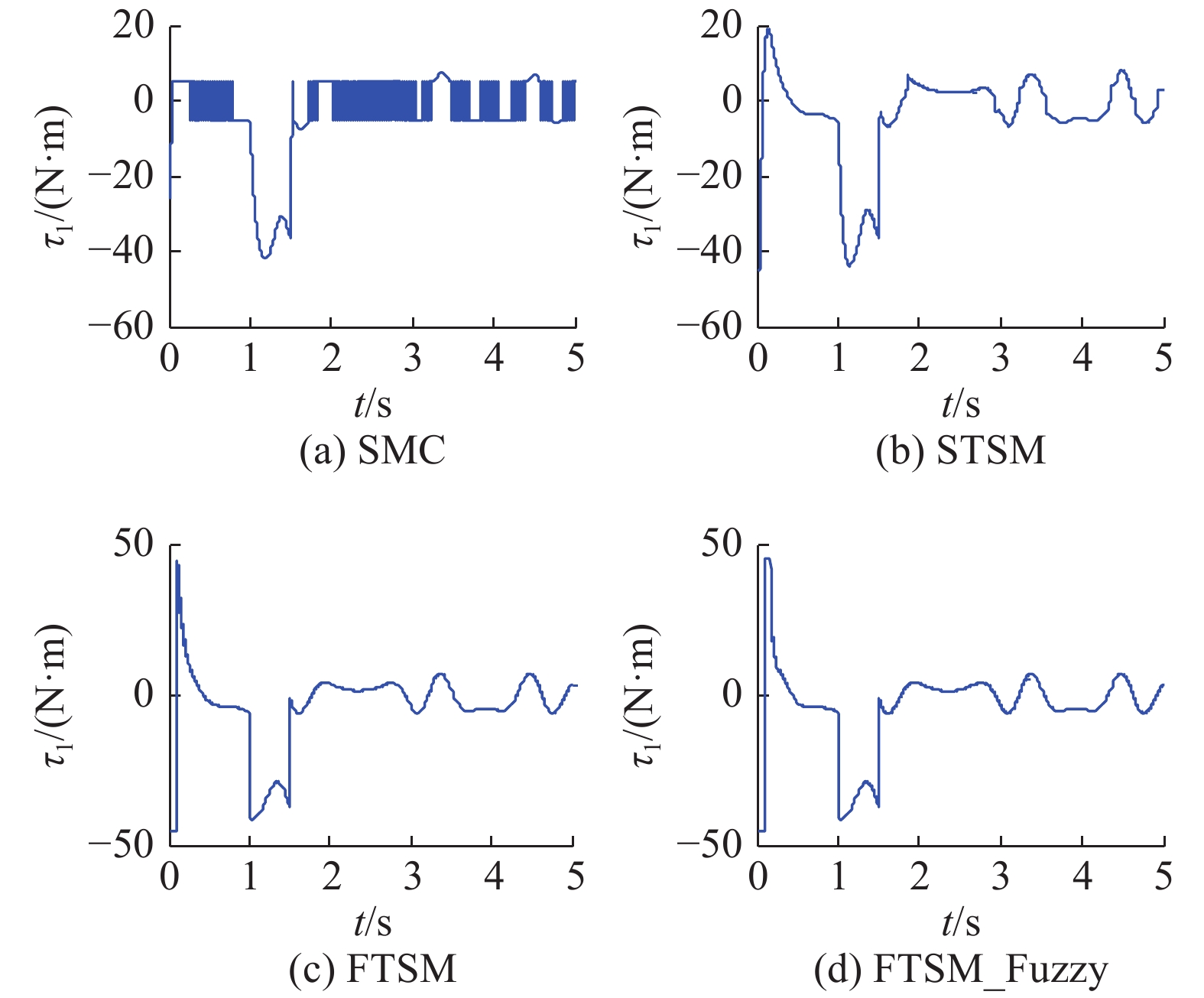
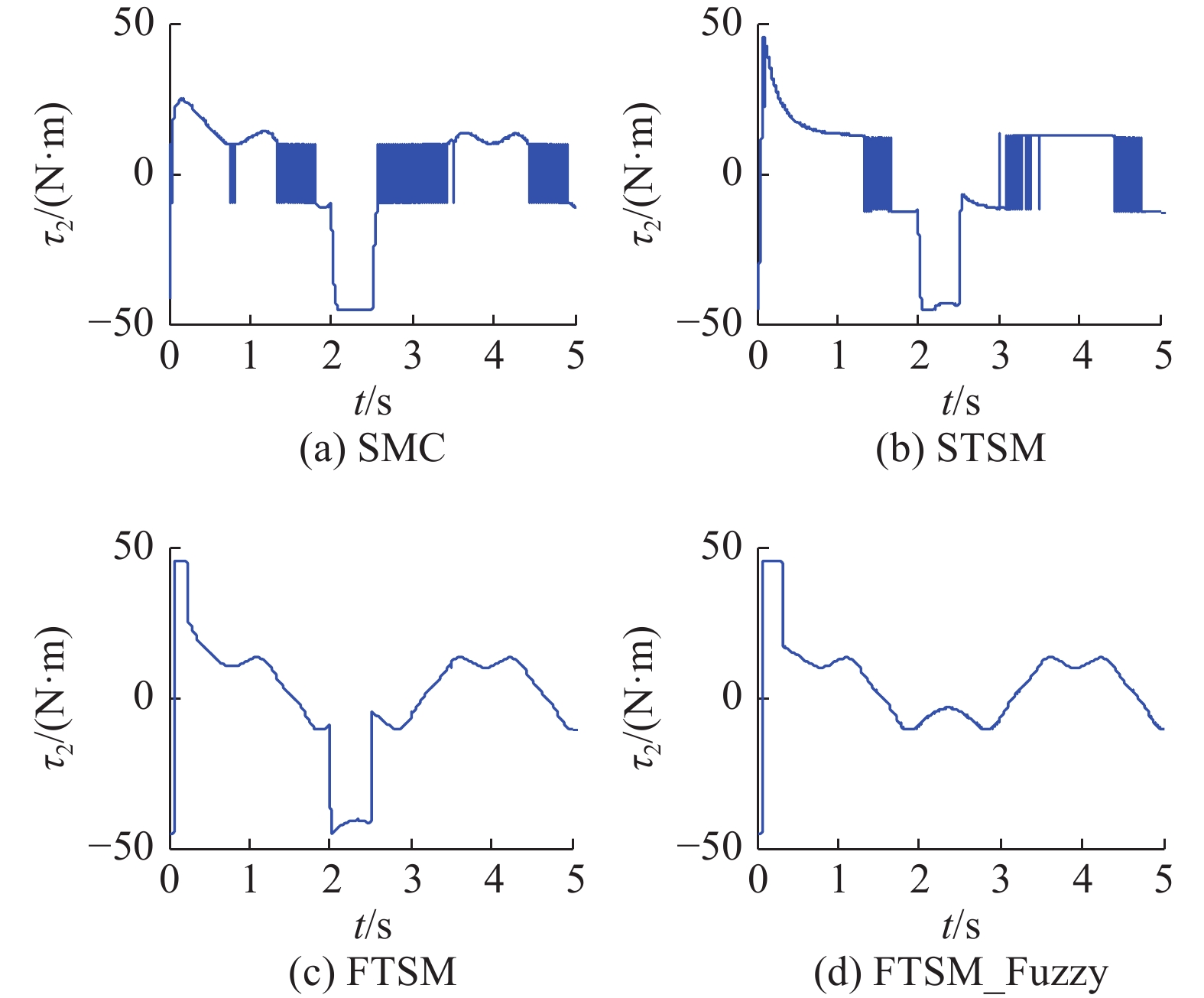
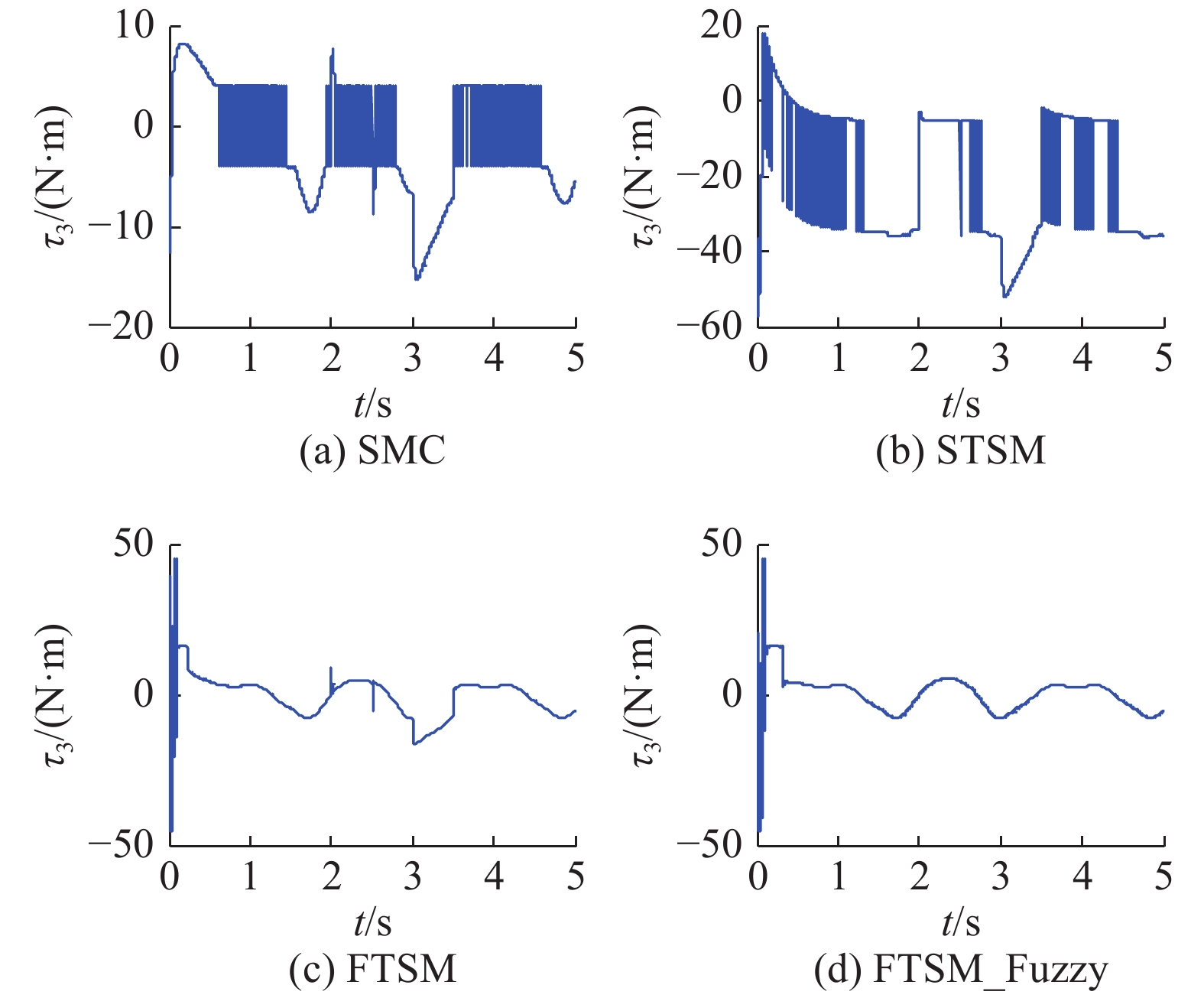
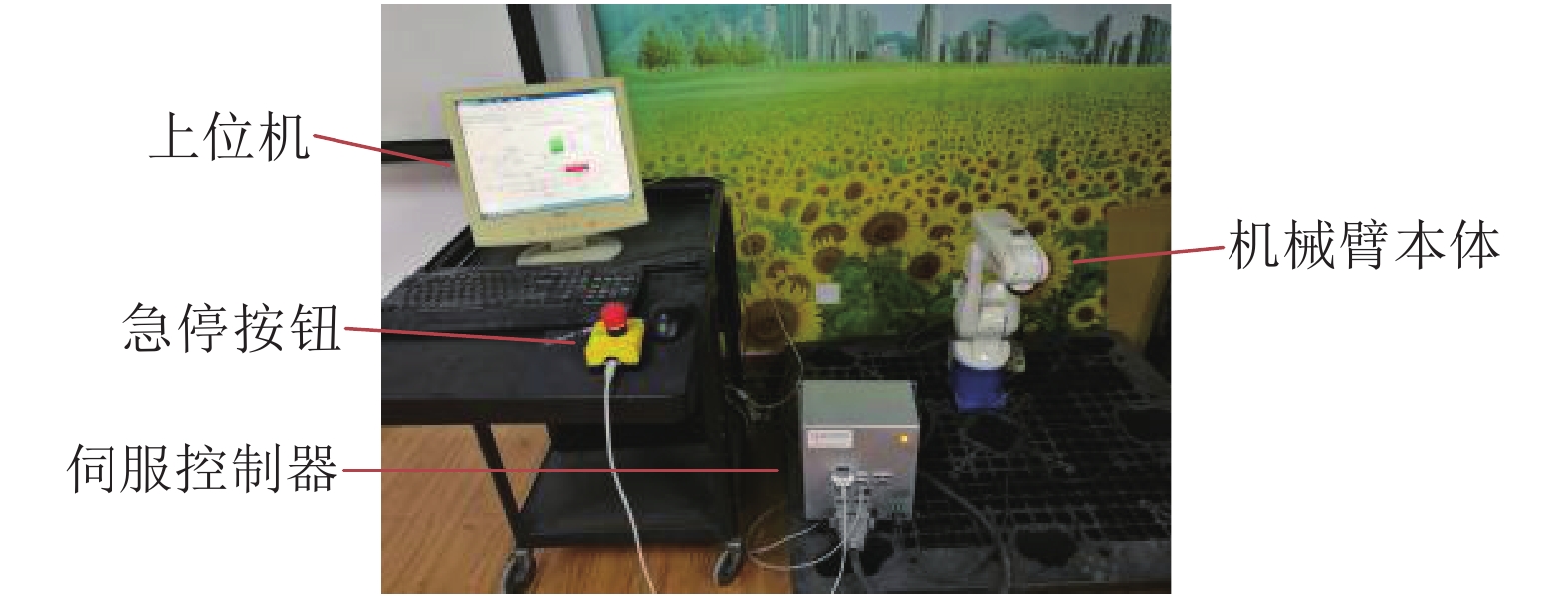
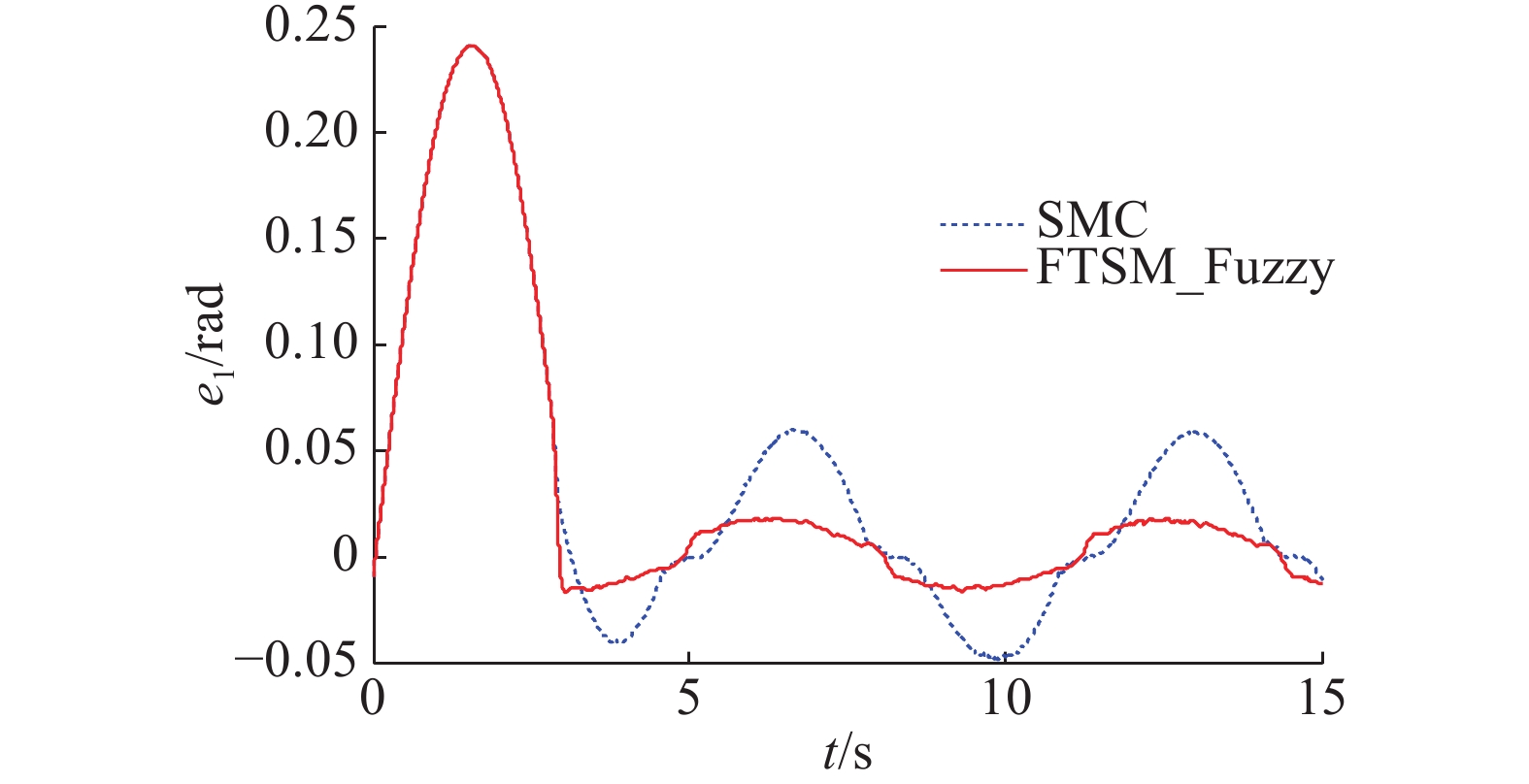
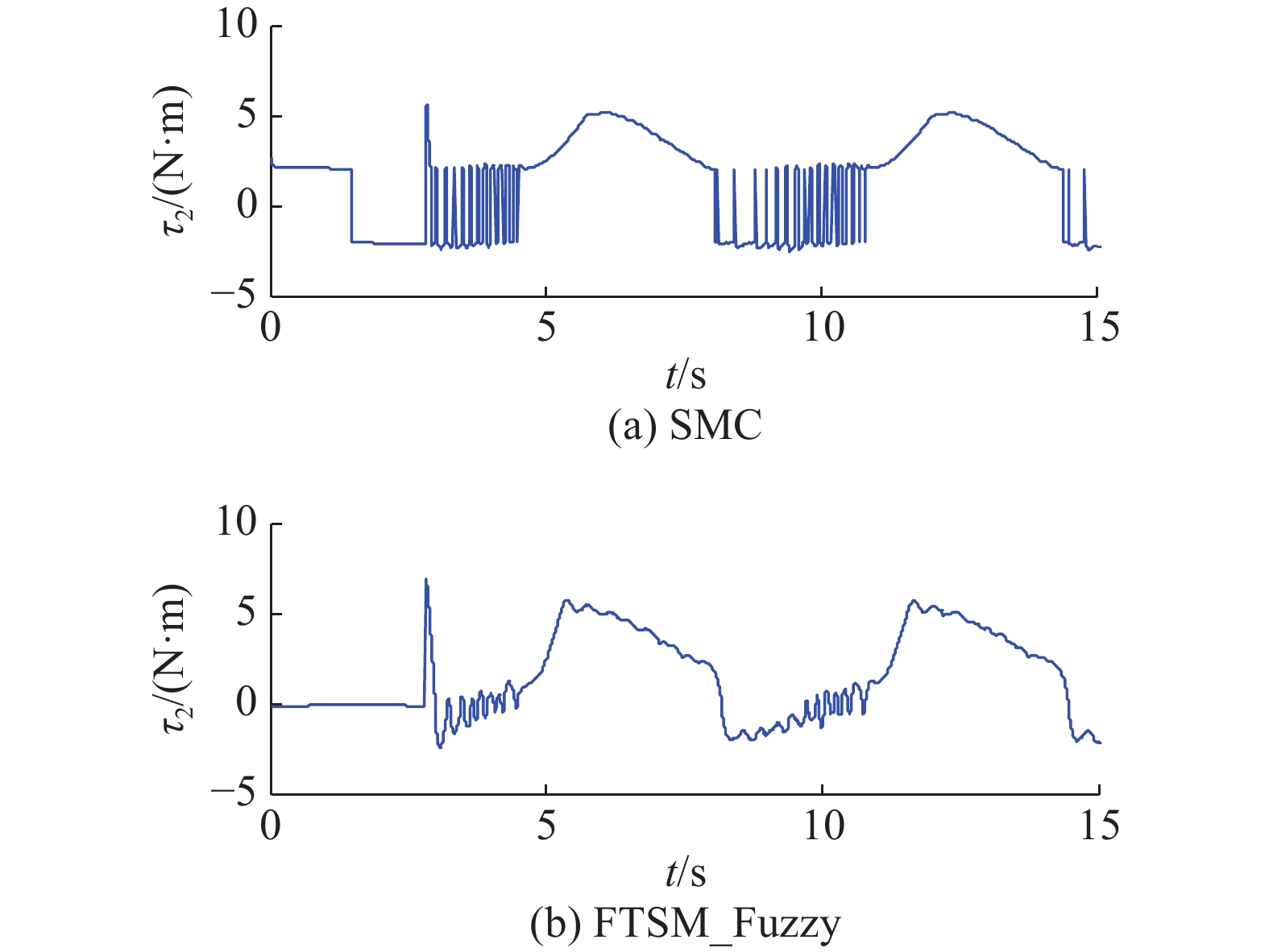
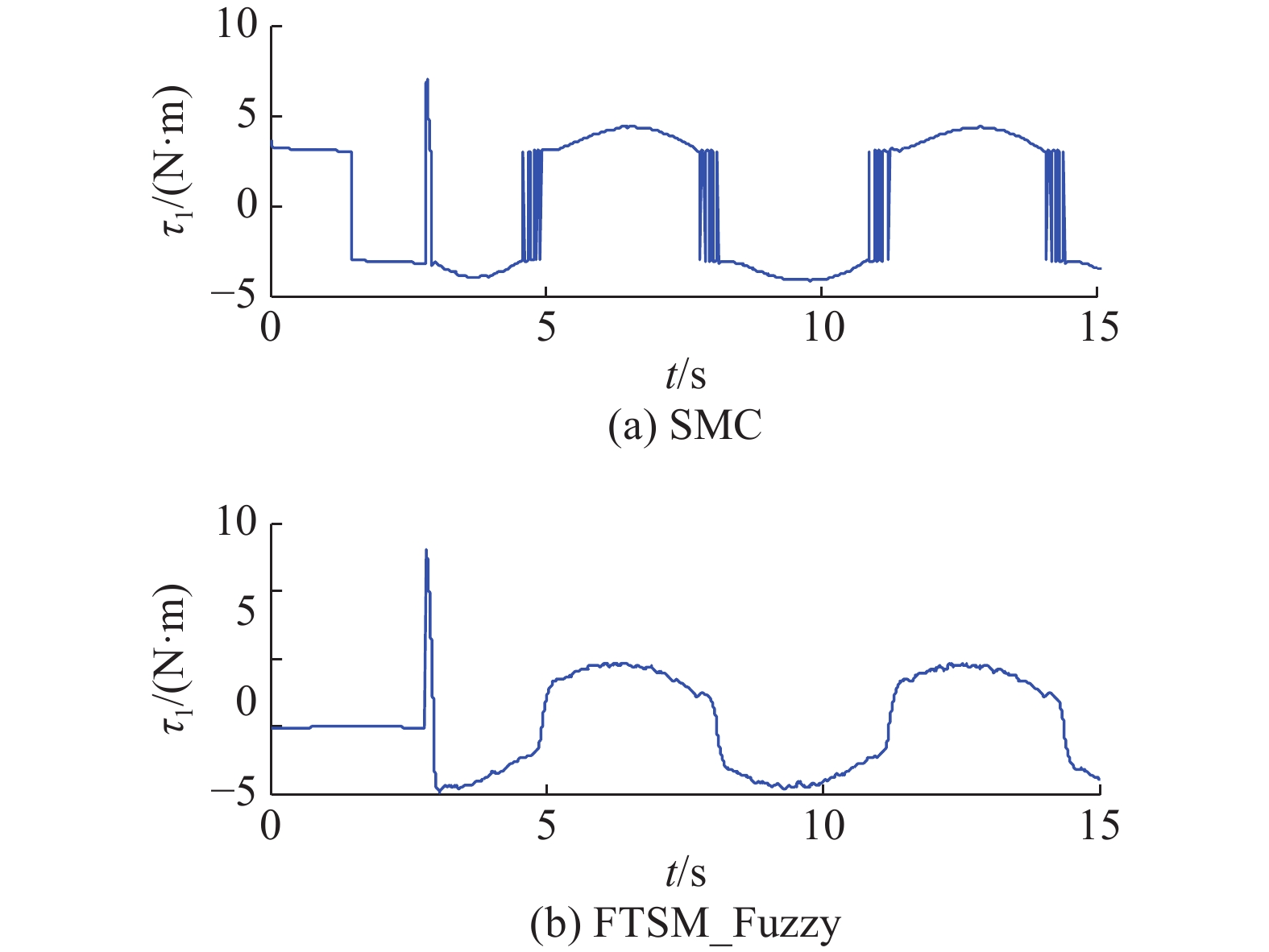
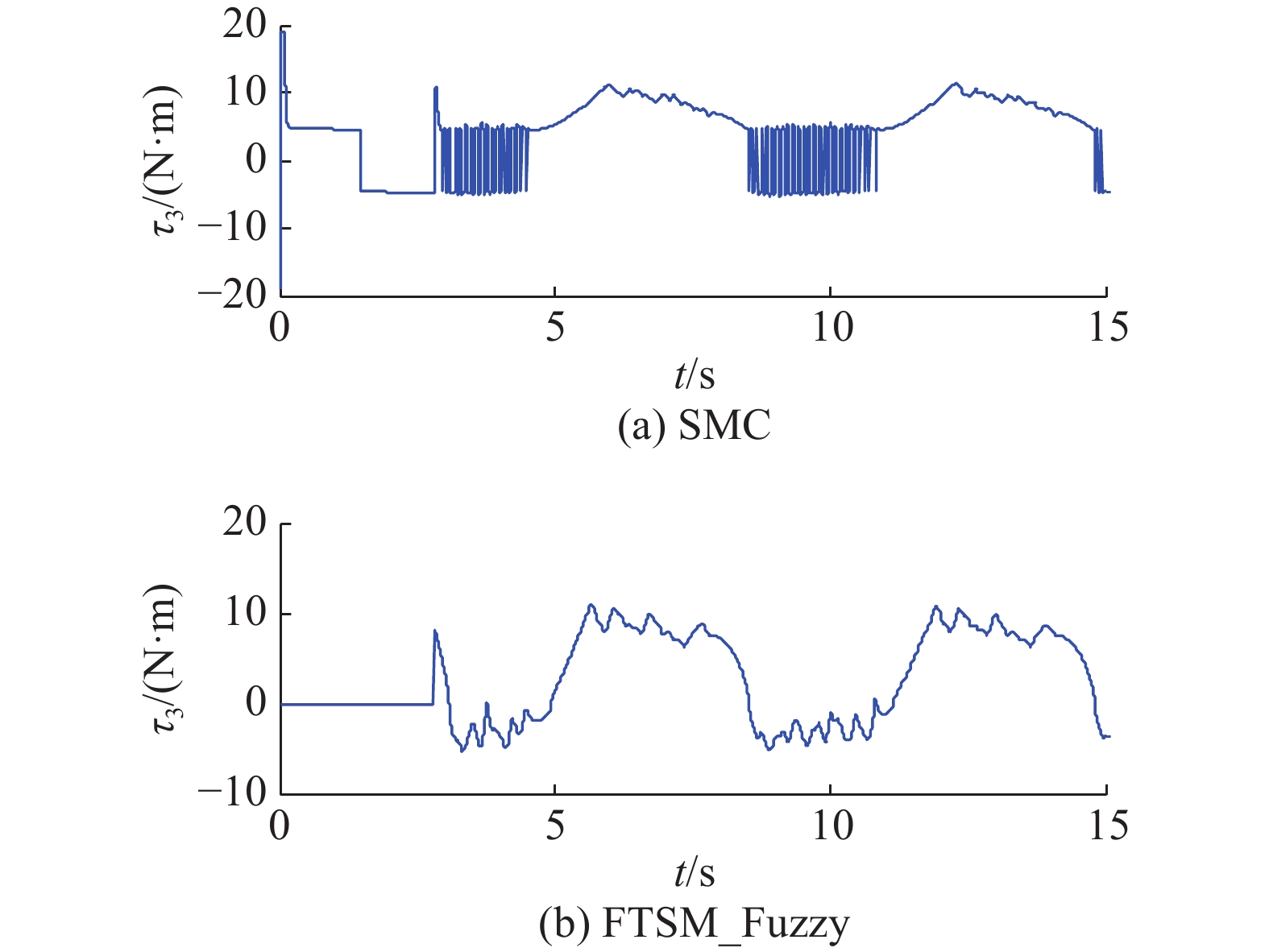
Abstract A terminal sliding mode control method with adaptive fuzzy system was proposed for the robotic manipulator trajectory tracking control problem with a large amount of uncertain information such as modeling errors and external disturbances. The nonsingular terminal sliding surface was adopted to ensure global fast convergence of state variables during sliding stage in this method. An improved double exponential reaching law with variable coefficients was used to improve the convergence rates of state variables and suppress the chattering of controller output during the approaching stage. An adaptive fuzzy multiple-input multiple-output (MIMO) system was utilized to approximate the system model and external disturbance, in order to get rid of the dependence on model information and improve trajectory tracking accuracy as well as anti-disturbance performance. The closed-loop stability and finite-time convergence of the system were proved by constructing Lyapunov functions. The Denso VP6242G serial manipulator was taken as the controlled object for comparative simulation and experiment. Results showed that the designed controller can effectively improve the trajectory tracking accuracy and anti-disturbance ability, and alleviate the chattering phenomenon in the controller output as well.
|
|
Received: 14 May 2018
Published: 17 May 2019
|
|
|
机械臂非奇异快速终端滑模模糊控制
针对存在建模误差和外部干扰等大量不确定信息的机械臂轨迹追踪控制问题,提出带有自适应模糊系统的终端滑模控制方法. 该方法采用非奇异快速终端滑模面,使状态变量在滑动阶段具有全局快速收敛性;选取带有变系数的改进型双幂次趋近律,提高状态变量在趋近运动阶段的收敛速度,削弱控制器输出抖振;利用自适应多输入多输出(MIMO)模糊系统对系统模型以及外部干扰进行逼近,摆脱对具体模型信息的依赖,提高轨迹追踪精度和抗干扰能力. 通过构建Lyapunov函数证明系统的闭环稳定性和有限时间收敛性. 以Denso VP6242G串联机械臂为被控对象进行对比仿真和实验,结果表明所设计的控制器能有效提高轨迹追踪精度和抗扰动能力,并缓解控制器输出中的抖振现象.
关键词:
机械臂,
轨迹追踪,
终端滑模控制,
双幂次趋近律,
模糊系统
|
|
| [1] |
ZHAO J B, WANG X, ZHANG G, et al Design and implementation of membrane controllers for trajectory tracking of nonholonomic wheeled mobile robots[J]. Integrated Computer Aided Engineering, 2015, 23 (1): 15- 30
doi: 10.3233/ICA-150503
|
|
|
| [2] |
CUONG P V, WANG Y N Adaptive trajectory tracking neural network control with robust compensator for robot manipulators[J]. Neural Computing and Applications, 2016, 27 (2): 525- 536
doi: 10.1007/s00521-015-1873-4
|
|
|
| [3] |
HUANG D, ZHAI J, AI W, et al Disturbance observer-based robust control for trajectory tracking of wheeled mobile robots[J]. Neurocomputing, 2016, 198 (C): 74- 79
|
|
|
| [4] |
高为炳. 变结构控制的理论及设计方法[M]. 北京: 科学出版社, 1995: 211–225.
|
|
|
| [5] |
姜立标, 吴中伟 基于趋近律滑模控制的智能车辆轨迹跟踪研究[J]. 农业机械学报, 2018, 49 (3): 381- 386
JIANG Li-biao, WU Zhong-wei Sliding mode control for intelligent vehicle trajectory tracking based on reaching law[J]. Transactions of the Chinese Society of Agricultural Machinery, 2018, 49 (3): 381- 386
|
|
|
| [6] |
李慧洁, 蔡远利 基于双幂次趋近律的滑模控制方法[J]. 控制与决策, 2016, 31 (3): 498- 502
LI Hui-jie, CAI Yuan-li Sliding mode control with double power reaching law[J]. Control and Decision, 2016, 31 (3): 498- 502
|
|
|
| [7] |
MAN Z H, PAPLINSKI A P, WU H R A robust adaptive terminal sliding mode control for rigid robotic manipulators[J]. IEEE Transactions on Automatic Control, 1999, 24 (1): 23- 41
|
|
|
| [8] |
FENG Y, YU X H, MAN Z H Non-singular terminal sliding mode control of rigid manipulators[J]. Automatica, 2002, 38 (12): 2159- 2167
doi: 10.1016/S0005-1098(02)00147-4
|
|
|
| [9] |
袁雷, 肖飞, 沈建清, 等 基于扰动观测器的不确定非线性系统非奇异终端滑模控制[J]. 控制与决策, 2014, 29 (2): 353- 357
YUAN Lei, XIAO Fei, SHEN Jian-qing, et al Nonsingular terminal sliding mode control with disturbance observer for uncertain nonlinear systems[J]. Control and Decision, 2014, 29 (2): 353- 357
|
|
|
| [10] |
李升波, 李克强, 王建强, 等 非奇异快速的终端滑模控制方法[J]. 信息与控制, 2009, 38 (1): 1- 8
LI Sheng-bo, LI Ke-qiang, WANG Jian-qiang, et al Nonsingular and fast terminal sliding mode control method[J]. Information and Control, 2009, 38 (1): 1- 8
doi: 10.3969/j.issn.1002-0411.2009.01.001
|
|
|
| [11] |
李升波, 李克强, 王建强, 等 非奇异快速的终端滑模控制方法及其跟车控制应用[J]. 控制理论与应用, 2010, 27 (5): 543- 550
LI Sheng-bo, LI Ke-qiang, WANG Jian-qiang, et al Nonsingular and fast terminal sliding mode control method[J]. Control Theory and Applications, 2010, 27 (5): 543- 550
|
|
|
| [12] |
LI T H S, HUANG Y C MIMO adaptive fuzzy terminal sliding-mode controller for robotic manipulators[J]. Information Sciences, 2010, 180 (23): 4641- 4660
doi: 10.1016/j.ins.2010.08.009
|
|
|
| [13] |
AMER A F, SALLAM E A, ELAWADY W M Adaptive fuzzy sliding mode control using supervisory fuzzy control for 3 DOF planar robot manipulators[J]. Applied Soft Computing Journal, 2011, 11 (8): 4943- 4953
doi: 10.1016/j.asoc.2011.06.005
|
|
|
| [14] |
SOLTANPOUR M R, KHOOBAN M H A particle swarm optimization approach for fuzzy sliding mode control for tracking the robot manipulator[J]. Nonlinear Dynamics, 2013, 74 (1/2): 467- 478
|
|
|
| [15] |
YOO B K, HAM W C Adaptive control of robot manipulator using fuzzy compensator[J]. IEEE Transactions on Fuzzy Systems, 2000, 8 (2): 186- 199
doi: 10.1109/91.842152
|
|
|
| [16] |
TRAN M D, KANG H J A novel adaptive finite-time tracking control for robotic manipulators using nonsingular terminal sliding mode and RBF neural networks[J]. International Journal of Precision Engineering and Manufacturing, 2016, 17 (7): 863- 870
doi: 10.1007/s12541-016-0105-x
|
|
|
| [17] |
WANG L X. Fuzzy systems are universal approximators [C]// IEEE International Conference on Fuzzy Systems. California: IEEE, 1992: 1163–1170.
|
|
|
| [18] |
MARKS G, SHTESSEL Y, GRATT H, et al. Effects of high order sliding mode guidance and observers on hit-to-kill interceptions [C]// AIAA Guidance, Navigation, and Control Conference and Exhibit. California: AIAA, 2006: 2005–5967.
|
|
|
| [19] |
丁力, 马瑞, 单文桃, 等 小型无人直升机航向线性自抗扰控制[J]. 农业机械学报, 2017, 48 (5): 22- 27
DING Li, MA Rui, SHAN Wen-tao, et al Linear active disturbance rejection control for yaw channel of small-scale unmanned helicopter[J]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48 (5): 22- 27
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|