|
|
|
| Coordinated control of hybrid electric vehicle based on extended state observer estimation |
Jia-jia WANG( ),Ying-feng CAI*(),Long CHEN,Shao-hua WANG,De-hua SHI ),Ying-feng CAI*(),Long CHEN,Shao-hua WANG,De-hua SHI |
| Automotive Engineering Research Institute, Jiangsu University, Zhenjiang 212013, China |
|
|
|
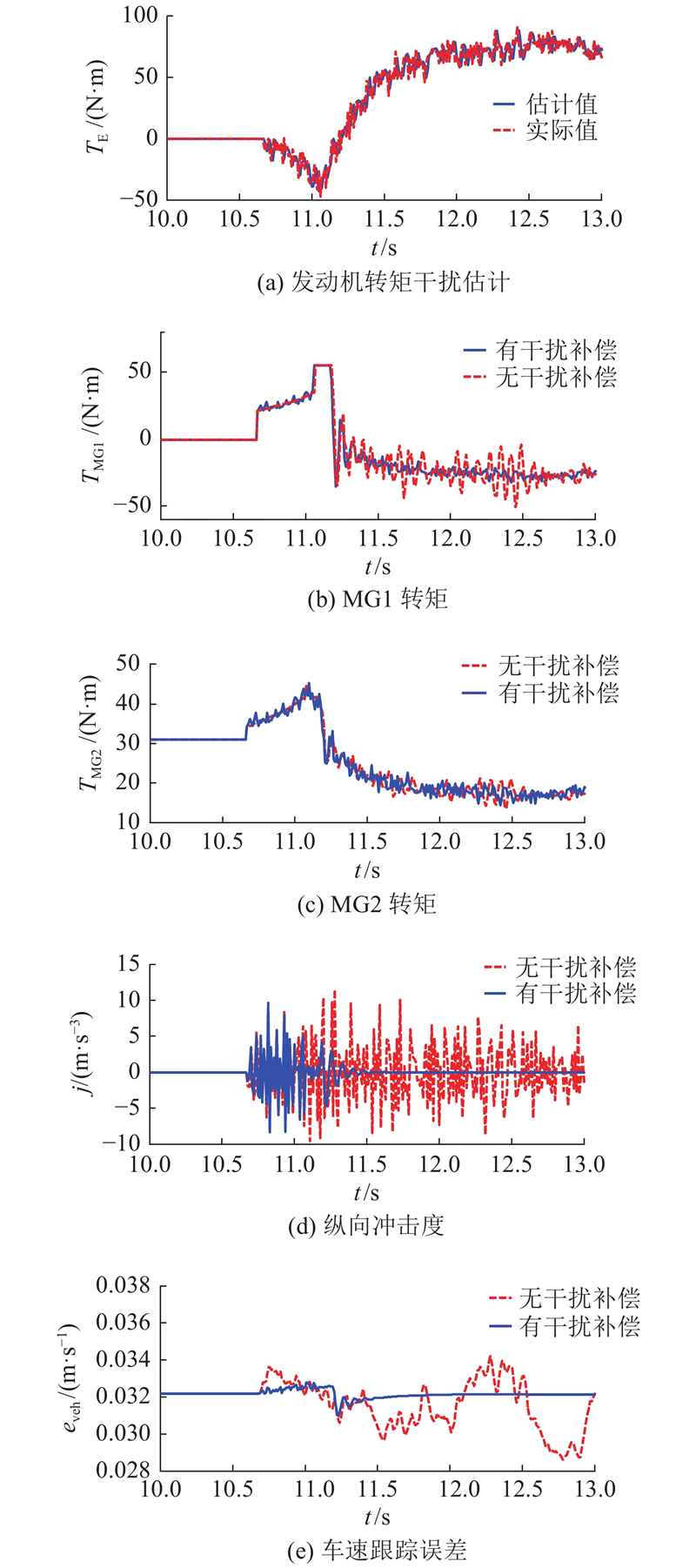
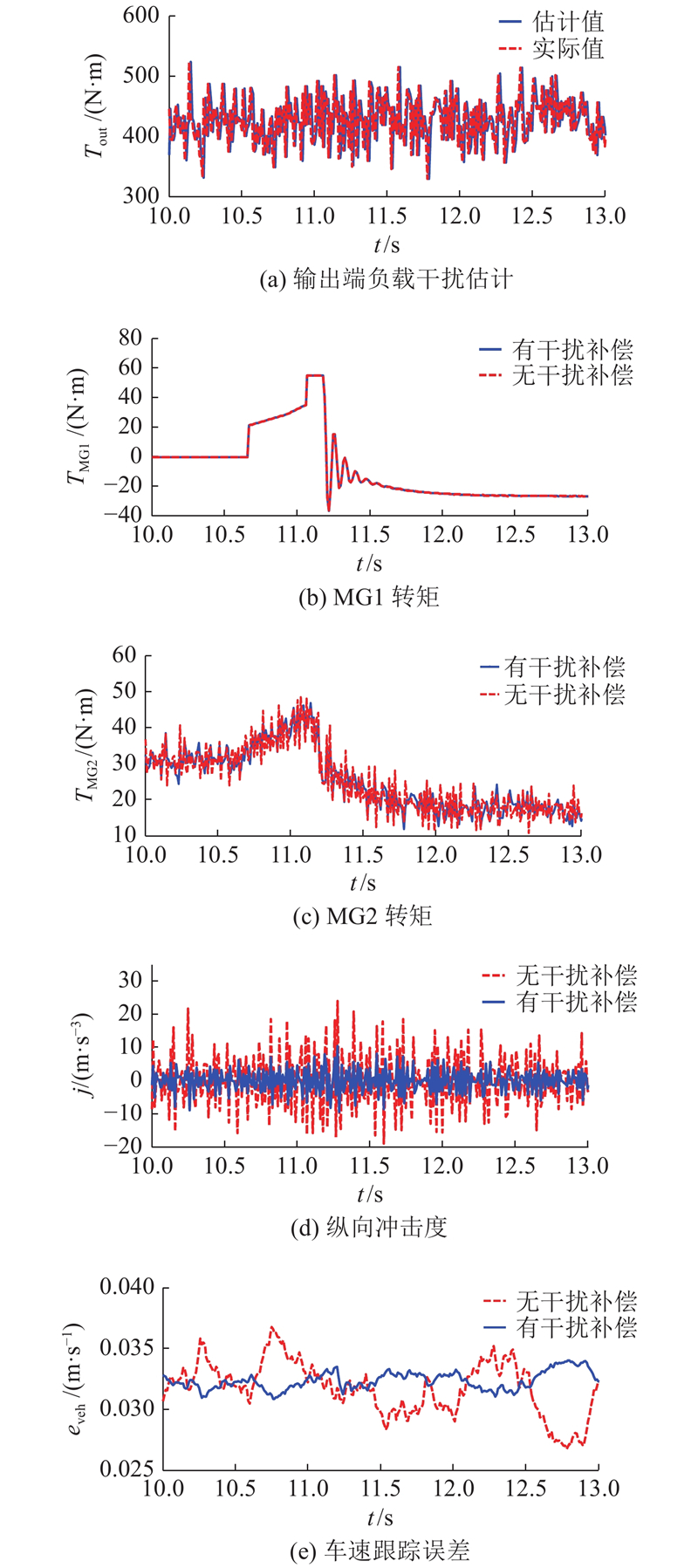
Abstract A torque coordinated control strategy based on disturbances compensation was proposed in order to improve the mode switching stability of power-split hybrid electric vehicles. A multi-variable linear extended state observer was designed aiming at the problem of engine dynamic response oscillation and vehicle driving condition variation. Then its estimation accuracy of the above disturbances was verified from the frequency domain perspective. The influence law of different disturbances on the stability of basic motor compensation control was analyzed. The load disturbance has a greater influence on the vehicle mode switching response, and the peak value of the switching jerk can reach 24.5 m/s3. The coordinated control strategy of power sources torque redistribution algorithm based on disturbances compensation was proposed and verified by simulation. Results show that the control strategy can guarantee the system stability and smoothness of mode switching under the obvious interference.
|
|
Received: 08 June 2020
Published: 05 July 2021
|
|
|
| Fund: 国家自然科学基金资助项目(U1764257,51905219);江苏省重点研发计划资助项目(BE2016149);江苏省自然科学基金青年基金资助项目(BK20190844);江苏省高等学校自然科学研究资助项目(19KJB580001) |
|
Corresponding Authors:
Ying-feng CAI
E-mail: wjj751772554@163.com;caicaixiao0304@126.com
|
基于扩张状态观测器估计的混合动力汽车协调控制
为了提高功率分流式混合动力汽车模式切换的稳定性,提出干扰补偿的转矩协调控制策略. 针对发动机动态响应振荡及车辆行驶工况多变的问题,设计多变量线性扩张状态观测器,从频域角度验证了观测器对于上述2种干扰的估计精确性. 研究不同干扰对基础电机补偿控制稳定性的影响,指出负载干扰对车辆模式切换响应的影响最大,引起的切换冲击最大可至24.5 m/s3. 提出基于干扰补偿的动力源转矩再分配算法,开展仿真验证. 结果表明,该协调控制策略在受到明显的外界干扰时能够保证系统的稳定性及模式切换的平顺性.
关键词:
混合动力汽车(HEV),
模式切换,
扩张状态观测器,
外界干扰,
稳定性
|
|
| [1] |
施德华, 蔡英凤, 汪少华, 等 系统效率最优的功率分流式混合动力汽车非线性预测控制[J]. 浙江大学学报: 工学版, 2019, 53 (12): 2271- 2279
SHI De-hua, CAI Ying-feng, WANG Shao-hua, et al Nonlinear predictive control of power split hybrid electric vehicle with optimal system efficiency[J]. Journal of Zhejiang University: Engineering Science, 2019, 53 (12): 2271- 2279
|
|
|
| [2] |
GEETHA A, SUBRAMANI C A comprehensive review on energy management strategies of hybrid energy storage system for electric vehicles[J]. International Journal of Energy Research, 2017, 41 (4): 1817- 1834
|
|
|
| [3] |
KOPRUBASI K, WESTERVELT E R, RIZZONI G. Toward the systematic design of controllers for smooth hybrid electric vehicle mode changes[C]// Proceedings of 2007 America Control Conference. New York: IEEE, 2007: 2985-2990.
|
|
|
| [4] |
温博轩, 王伟达, 项昌乐, 等 混联式混合动力系统动态响应协调控制[J]. 哈尔滨工业大学学报, 2016, 48 (1): 72- 79
WEN Bo-xuan, WANG Wei-da, XIANG Chang-le, et al Torque coordinated control for the multi-power in parallel-series HEV[J]. Journal of Harbin Institute of Technology, 2016, 48 (1): 72- 79
doi: 10.11918/j.issn.0367-6234.2016.01.011
|
|
|
| [5] |
童毅. 并联式混合动力系统动态协调控制问题的研究[D]. 北京: 清华大学, 2004.
TONG Yi. Study on the coordinated control issue in parallel hybrid electric system[D]. Beijing: Tsinghua University, 2004.
|
|
|
| [6] |
YOSHIOK A. Noise and vibration reduction technology in hybrid vehicle development[C]// SAE Paper. Traverse City: SAE, 2001: 2001-01-1415.
|
|
|
| [7] |
HUANG K, XIANG C, MA Y, et al Mode shift control for a hybrid heavy-duty vehicle with power-split transmission[J]. Energies, 2017, 10 (2): 177
doi: 10.3390/en10020177
|
|
|
| [8] |
ZHU F, CHEN L, YIN C, et al Dynamic modelling and systematic control during the mode transition for a multi-mode hybrid electric vehicle[J]. Proceedings of the Institution of Mechanical Engineers Part D Journal of Automobile Engineering, 2013, 227 (7): 1007- 1023
doi: 10.1177/0954407013477027
|
|
|
| [9] |
MA Y, HUANG K, XIANG C, et al. A control strategy to reduce torque variation for dual-mode power-split hybrid electric vehile during mode shift[C]// International Conference on Modeling, Identification and Control. Sousse: IEEE, 2016: 1-8.
|
|
|
| [10] |
LIN Y, QIN D, LIU Y, et al Control strategy for all the mode-switches of hybrid electric vehicle[J]. Advances in Mechanical Engineering, 2016, 8 (11): 1- 17
|
|
|
| [11] |
SUN J, XING G, LIU X, et al A novel torque coordination control strategy of a single-shaft parallel hybrid electric vehicle based on model predictive control[J]. Mathematical Problems in Engineering, 2015, (1): 1- 12
|
|
|
| [12] |
CHIANG C J, CHEN Y C, LIN C Y. Fuzzy sliding mode control for smooth mode changes of a parallel hybrid electric vehicle[C]// IEEE International Conference on Control and Automation. Taichung: IEEE, 2014: 1072-1077.
|
|
|
| [13] |
SU Y, HU M, SU L, et al Dynamic coordinated control during mode transition process for a compound power-split hybrid electric vehicle[J]. Mechanical Systems and Signal Processing, 2018, 107: 221- 240
doi: 10.1016/j.ymssp.2018.01.023
|
|
|
| [14] |
杜波, 秦大同, 段志辉 HEV多领域物理建模与模式切换控制仿真[J]. 系统仿真学报, 2013, 25 (7): 1668- 1674
DU Bo, QIN Da-tong, DUAN Zhi-hui Multi-domain physical modeling and mode switching control simulation of HEV[J]. Journal of System Simulation, 2013, 25 (7): 1668- 1674
|
|
|
| [15] |
DU B, YIN X F, YANG Y Robust control of mode transition for a single-motor full hybrid electric vehicle[J]. Advances in Mechanical Engineering, 2017, 9 (9): 1- 16
|
|
|
| [16] |
温博轩, 王伟达, 项昌乐, 等 机电复合传动系统基于μ-综合方法的鲁棒协调控制[J]. 机械工程学报, 2017, 53 (14): 88- 97
WEN Bo-xuan, WANG Wei-da, XIANG Chang-le, et al Coordination control based on μ-synthesize for electro-mechanical transmission[J]. Journal of Mechanical Engineering, 2017, 53 (14): 88- 97
doi: 10.3901/JME.2017.14.088
|
|
|
| [17] |
LIVSHIZ M, KAO M, WILL A. Engine torque control variation and analysis[EB/OL]. (2008-04-14). https://doi.org/10.4271/2008-01-1016.
|
|
|
| [18] |
CHEN L, XI G, SUN J Torque coordination control during mode transition for a series–parallel hybrid electric vehicle[J]. IEEE Transactions on Vehicular Technology, 2012, 61 (7): 2936- 2949
doi: 10.1109/TVT.2012.2200305
|
|
|
| [19] |
李天云, 朱建华, 刘智铭, 等 基于李雅普诺夫函数法的扩张状态观测器参数优化[J]. 哈尔滨理工大学学报, 2012, 17 (1): 50- 53
LI Tian-yun, ZHU Jian-hua, LIU Zhi-ming, et al Parameter optimization of extended state observer based on Lyapunov function method[J]. Journal of Harbin University of Science and Technology, 2012, 17 (1): 50- 53
doi: 10.3969/j.issn.1007-2683.2012.01.011
|
|
|
| [20] |
韩京清. 自抗扰控制技术: 估计补偿不确定因素的控制技术[M]. 北京: 国防工业出版社, 2008.
|
|
|
| [21] |
李宗俐. 基于干扰观测器的模型预测控制器设计与实现[D]. 长春: 吉林大学, 2018.
LI Zong-li. The design and realization of the model predictive controller based on disturbance observer[D]. Changchun: Jilin University, 2018.
|
|
|
| [22] |
赵治国, 蒋蓝星, 李蒙娜, 等 基于参考模型的复合功率分流系统模式切换中的转矩协调控制[J]. 汽车工程, 2018, 40 (10): 1132- 1138
ZHAO Zhi-guo, JIANG Lan-xing, LI Meng-na, et al Torque coordinated control during mode switching of a compound power-split hybrid system based on reference model[J]. Automotive Engineering, 2018, 40 (10): 1132- 1138
|
|
|
| [23] |
李海晓. 基于鲁棒控制理论的HEV模式切换协调控制策略[D]. 洛阳: 河南科技大学, 2018.
LI Hai-xiao. Mode switching coordinated control strategy of HEV based on robust control theory[D]. Luoyang: Henan University of Science and Technology, 2018.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|