|
|
|
| High precision control of electromechanical system based on observer friction compensation |
Xi LI( ),Jian HU*(),Jian-yong YAO,Ke-peng WEI,Peng-fei WANG,Hao-chen XING ),Jian HU*(),Jian-yong YAO,Ke-peng WEI,Peng-fei WANG,Hao-chen XING |
| School of Mechanical Engineering, Nanjing University of Science and Technology, Nanjing 210094, China |
|
|
|
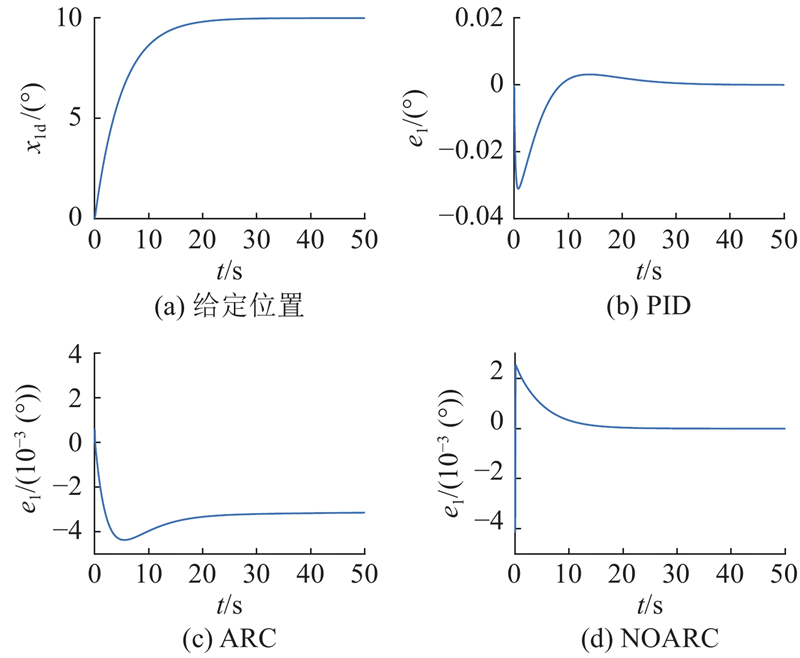
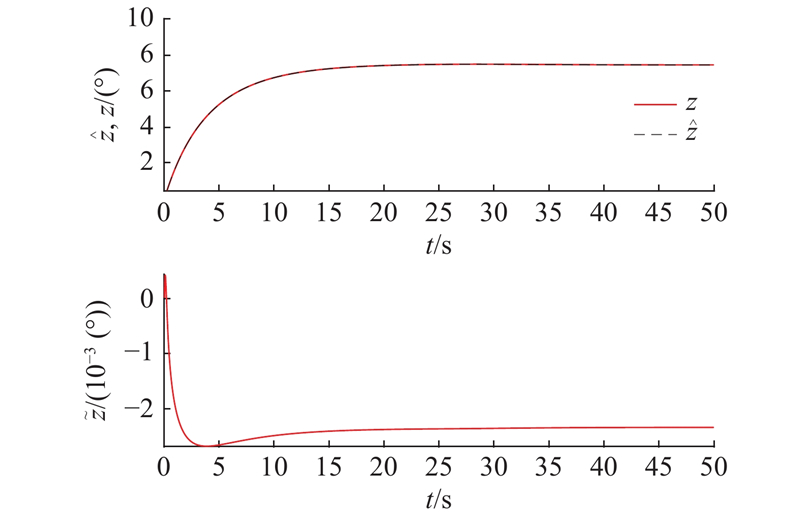
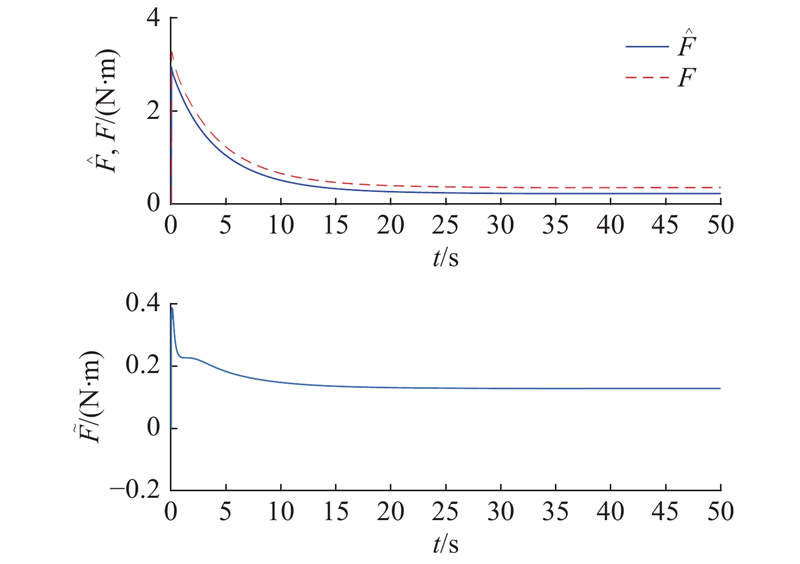
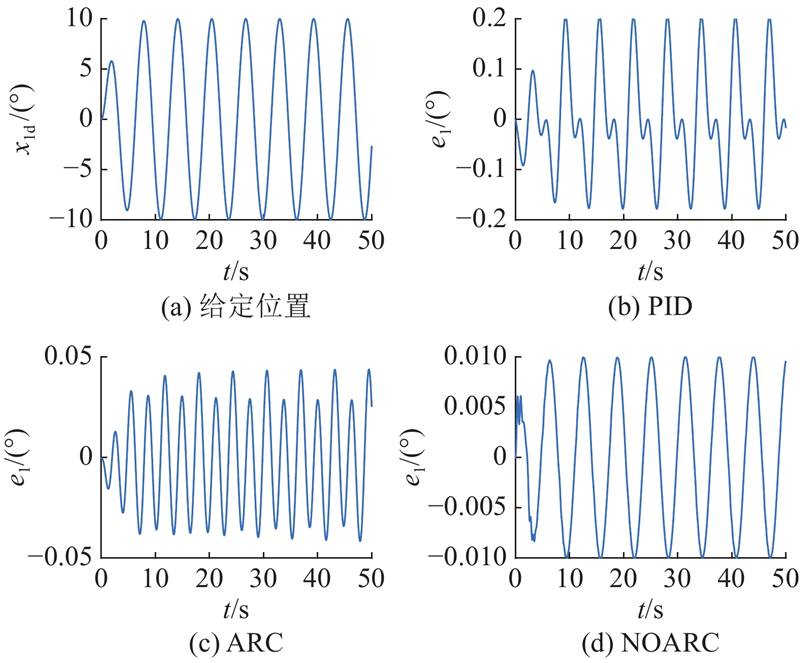
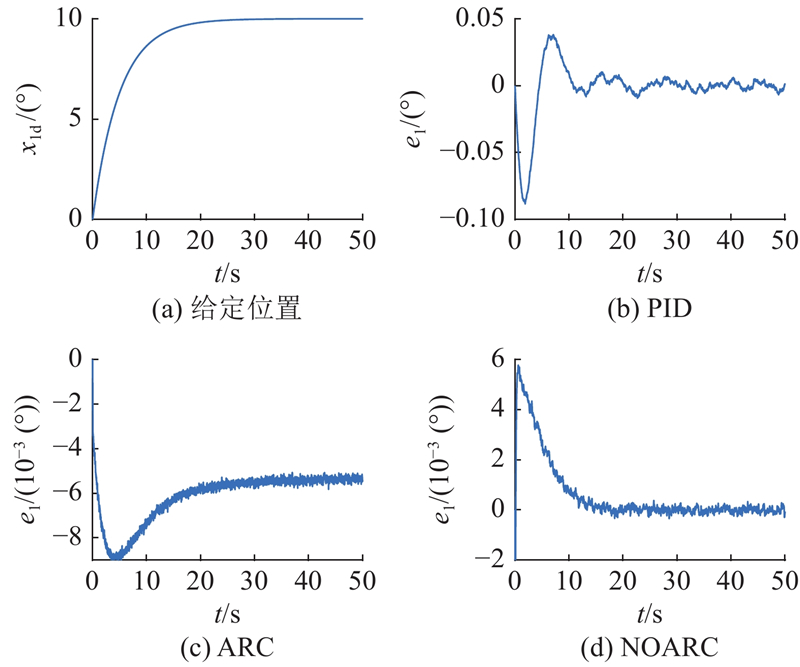
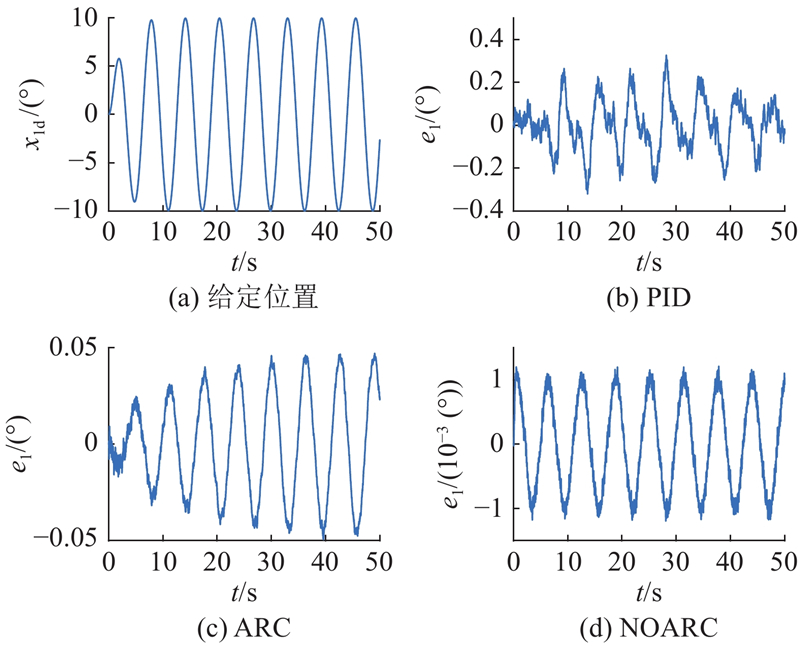
Abstract An adaptive robust controller based on nonlinear observer friction compensation was designed aiming at the problem of obvious friction nonlinearity and other interferences in the electromechanical actuation system at low speed, which may easily lead to the decrease of system tracking accuracy and stability. The LuGre friction model was used to describe the friction phenomenon of the system for the nonlinearity of friction, and a nonlinear observer was proposed to observe the internal friction state of the model. The parameter adaptive law was designed for uncertain parameters such as system friction coefficient and rotational inertia. The friction nonlinearity and parameter uncertainty were compensated by feed-forward compensation, and robust terms were designed to overcome other disturbances in the system. Lyapunov stability theory was used to prove that the proposed controller can achieve the bounded stability of the system in the presence of disturbances. The experimental results show that the proposed controller has higher control accuracy and stronger robustness, which is an order of magnitude higher than the tracking accuracy of traditional PID controller.
|
|
Received: 05 July 2020
Published: 30 July 2021
|
|
|
| Fund: 国家自然科学基金资助项目(51975294);高性能复杂制造国家重点实验室开放课题基金资助项目(Kfkt2019–11);中央高校基本科研业务费专项资金资助项目(30920010009) |
|
Corresponding Authors:
Jian HU
E-mail: lixi_l@126.com;hujiannjust@163.com
|
基于观测器摩擦补偿的机电系统高精度控制
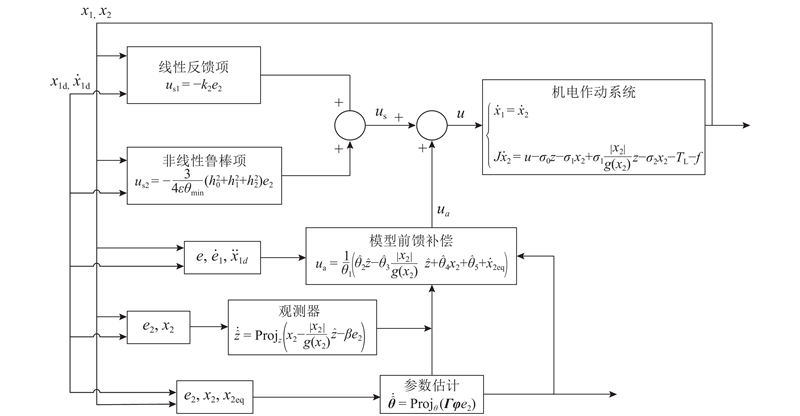
针对机电作动系统在低速阶段摩擦非线性明显且同时存在其他干扰,易导致系统跟踪精度、稳定性下降这一问题,设计基于非线性观测器摩擦补偿的自适应鲁棒控制器. 针对摩擦非线性,利用LuGre摩擦模型描述系统的摩擦现象,提出非线性观测器对模型的内部摩擦状态进行观测. 针对系统摩擦系数、转动惯量及其他不确定性参数,设计参数自适应律进行估计. 利用前馈补偿的方法,对摩擦非线性和参数不确定性进行补偿,设计鲁棒项克服系统的其他扰动. 利用Lyapunov稳定性定理证明了提出的控制器在存在扰动的情况下可以实现系统的有界稳定性. 实验结果表明,提出的控制器具有较高的控制精度与较强的鲁棒性,跟踪精度较传统的PID控制器提高了一个数量级.
关键词:
机电作动系统,
LuGre摩擦模型,
非线性观测器,
自适应鲁棒控制,
有界稳定性
|
|
| [1] |
QI W, GENG L, YONG Z, et al Numerical and experimental investigation on electromechanical aileron actuation system with joint clearance[J]. Journal of Mechanical Science and Technology, 2019, 33 (2): 525- 535
doi: 10.1007/s12206-019-0105-8
|
|
|
| [2] |
XI X, SI X, XIA W, et al Research on improved control method of electromechanical actuation[J]. The Journal of Engineering, 2018, 2018 (13): 631- 635
doi: 10.1049/joe.2018.0045
|
|
|
| [3] |
申健, 刘从灵, 冮庆庸 小型飞机起落架收放机电作动器研究与开发[J]. 科技风, 2018, (24): 89
SHEN Jian, LIU Cong-ling, YOU Qing-yong Research and development of electromechanical actuators for retracting and landing small aircraft landing gears[J]. Sci-Tech Wind, 2018, (24): 89
|
|
|
| [4] |
YERLIKAYA Ü, BALKAN T. Increasing the bandwidth frequency by Coulomb friction compensation method in electromechanical control actuation systems[C]// IEEE/ASME Advanced Intelligent Mechatronics. [S. l.]: IEEE, 2019.
|
|
|
| [5] |
HUANG Jian, ZHANG Xin-hua, WANG Guan, et al. Adaptive friction compensation of electromechanical servo system based on LuGre model[C]// IEEE Conference on Industrial Electronics and Applications. [S. l.]: IEEE, 2018: 2596-2600.
|
|
|
| [6] |
曹文祺, 李少远 具有可参数化不确定性系统的对偶自适应模型预测控制[J]. 控制理论与应用, 2019, 36 (8): 1197- 1206
CAO Wen-qi, LI Shao-yuan Dual adaptive model predictive control with parametric uncertainty system[J]. Control Theory and Applications, 2019, 36 (8): 1197- 1206
doi: 10.7641/CTA.2018.80324
|
|
|
| [7] |
钟震宇, 谢远龙, 周广兵, 等 伺服驱动系统无模型自适应控制[J]. 湖南科技大学学报: 自然科学版, 2019, 34 (1): 85- 93
ZHONG Zhen-yu, XIE Yuan-long, ZHOU Guang-bing, et al Model-free adaptive control of servo drive system[J]. Journal of Hunan University of Science and Technology: Natural Science Edition, 2019, 34 (1): 85- 93
|
|
|
| [8] |
TAHEREH B, MAHSA K, ALI R T Robust control approach for handling matched and/or unmatched uncertainties in port-controlled Hamiltonian systems[J]. IET Cyber-systems and Robotics, 2019, 1 (3): 73- 80
doi: 10.1049/iet-csr.2019.0019
|
|
|
| [9] |
YAO J, JIAO Z, MA D Adaptive robust control of DC motors with extended state observer[J]. IEEE Transactions on Industrial Electronics, 2014, 61 (7): 3630- 3637
doi: 10.1109/TIE.2013.2281165
|
|
|
| [10] |
JIAN H, YANG Q, LONG L High-order sliding-mode observer based output feedback adaptive robust control of a launching platform with backstepping[J]. International Journal of Control, 2016, 89 (10): 2029- 2039
doi: 10.1080/00207179.2016.1147604
|
|
|
| [11] |
YAO J, DENG W, JIAO Z Adaptive control of hydraulic actuators with LuGre model-based friction compensation[J]. Transactions on Industrial Electronics, 2015, 62 (10): 6469- 6477
doi: 10.1109/TIE.2015.2423660
|
|
|
| [12] |
邓文翔, 马吴宁, 姚建勇 机电伺服系统鲁棒自适应重复控制[J]. 上海交通大学学报, 2016, 50 (9): 1486- 1492
DENG Wen-xiang, MA Wu-ning, YAO Jian-yong Robust adaptive repetitive control of electromechanical servo systems[J]. Journal of Shanghai Jiaotong University, 2016, 50 (9): 1486- 1492
|
|
|
| [13] |
王元刚. 发射装置伺服系统的摩擦补偿及高精度控制策略研究[D]. 南京: 南京理工大学, 2018.
WANG Yuan-gang. Research on friction compensation and high-precision control strategy of launcher servo system[D]. Nanjing: Nanjing University of Science and Technology, 2018.
|
|
|
| [14] |
BISOFFI A, BEERENS R, HEEMELS W, et al To stick or to slip: a reset PID control perspective on positioning systems with friction[J]. Annual Reviews in Control, 2020, 20 (49): 37- 63
|
|
|
| [15] |
王慧, 姜守岭 数字液压缸反馈螺杆库伦摩擦仿真研究[J]. 控制工程, 2020, 27 (4): 662- 668
WANG Hui, JIANG Shou-ling Coulomb friction simulation study on feedback screw of digital hydraulic cylinder[J]. Control Engineering, 2020, 27 (4): 662- 668
|
|
|
| [16] |
FELLIPE G M, CLAUDIO G Stribeck parameters estimation of a diaphragm valve using quasi Newton method[J]. IFAC Papers on Line, 2019, 52 (1): 225- 230
doi: 10.1016/j.ifacol.2019.06.066
|
|
|
| [17] |
FENG H, QIAO W, YIN C, et al Identification and compensation of non-linear friction for a electro-hydraulic system[J]. Mechanism and Machine Theory, 2019, 19 (141): 1- 13
|
|
|
| [18] |
TOBIAS P T, IGNATIUS P N, INDRAWANTO I, et al Stable PID control strategy to remove limit cycle due to Stribeck friction on DC servo motor[J]. International Review of Automatic Control, 2018, 11 (4): 208
doi: 10.15866/ireaco.v11i4.14883
|
|
|
| [19] |
武柏安, 回学文, 龙海洋, 等 磁流变阻尼器Dahl模型的参数化建模[J]. 内燃机与配件, 2020, 306 (6): 104- 105
WU Bai-an, HUI Xue-wen, LONG Hai-yang, et al Parametric modeling of the Dahl model of magnetorheological dampers[J]. Internal Combustion Engine and Parts, 2020, 306 (6): 104- 105
doi: 10.3969/j.issn.1674-957X.2020.06.051
|
|
|
| [20] |
FAY A I, VICTOR M O, GISELA P Minor loops of the Dahl and LuGre models[J]. Applied Mathematical Modeling, 2020, (77): 1679- 1690
|
|
|
| [21] |
SIMONI L, BESCHI M, VISIOLI A, et al Inclusion of the dwell time effect in the LuGre friction model[J]. Mechatronics, 2019, 66 (2): 1016- 1023
|
|
|
| [22] |
殷婷婷, 贾方秀, 于纪言, 等 基于改进LuGre摩擦模型的双旋弹丸固定舵翼滚转位置鲁棒自适应控制算法[J]. 兵工学报, 2019, 40 (12): 2425- 2432
YIN Ting-ting, JIA Fang-xiu, YU Ji-yan, et al Robust adaptive control algorithm for rolling position of fixed rudder wing of double-rotating projectile based on improved LuGre friction model[J]. Journal of Ordnance Engineering, 2019, 40 (12): 2425- 2432
doi: 10.3969/j.issn.1000-1093.2019.12.005
|
|
|
| [23] |
HU J, WANG Y, LIU L, et al High-accuracy robust adaptive motion control of a torque-controlled motor servo system with friction compensation based on neural network[J]. Proceedings of the Institution of Mechanical Engineers, 2018, 233 (7): 203- 210
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|