|
|
|
| Hierarchical closed-loop optimization strategy for cumulative error of robot machining system |
Yan HAO( ),Ya-bin DING*(),Jin-sheng FU ),Ya-bin DING*(),Jin-sheng FU |
| Key Laboratory of Mechanism Theory and Equipment Design of Ministry of Education, Tianjin University, Tianjin 300354, China |
|
|
|
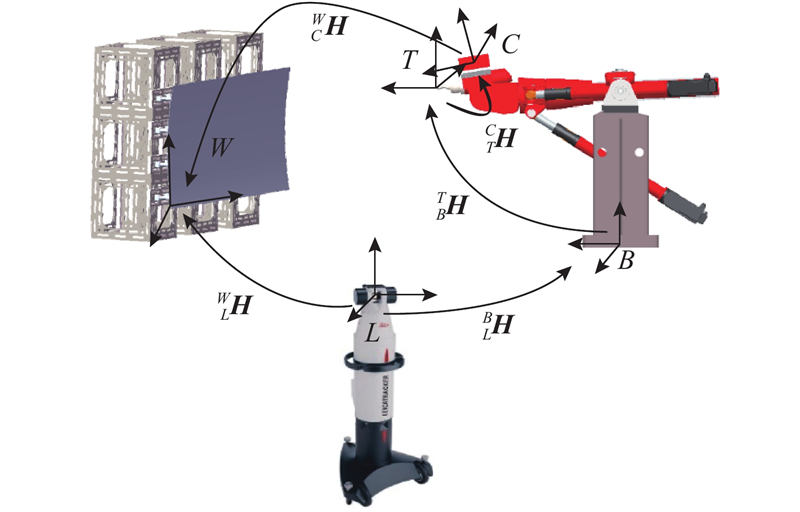
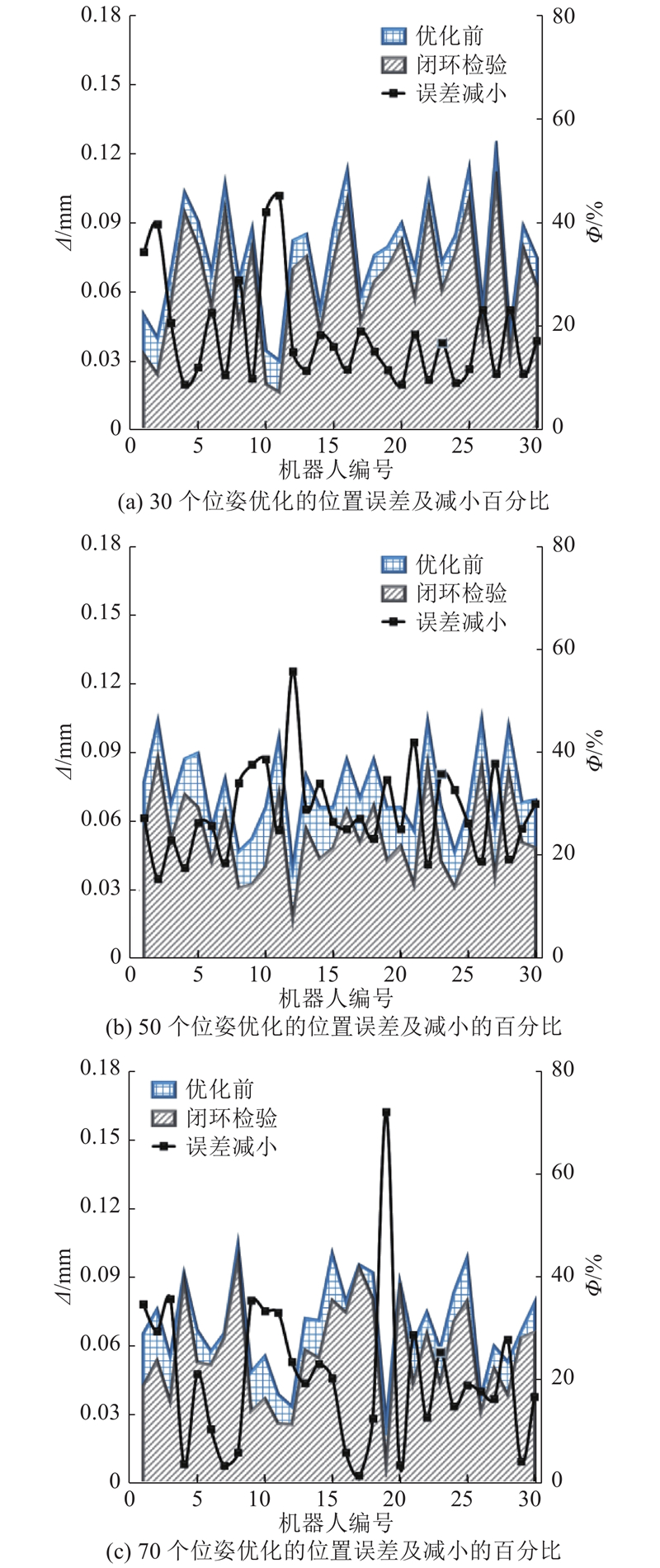
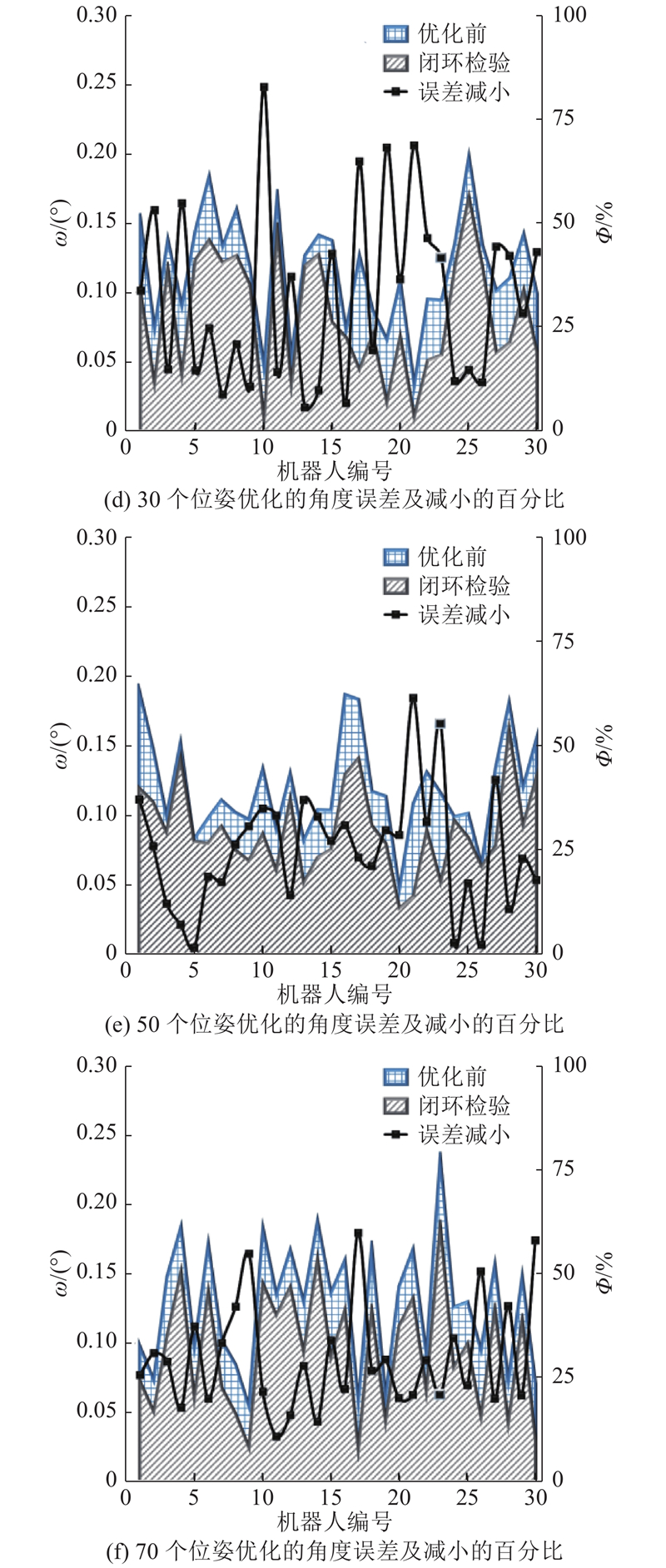
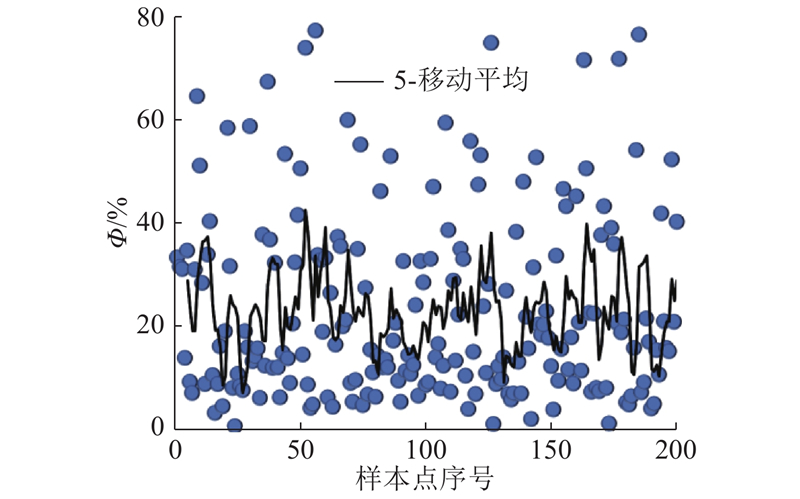
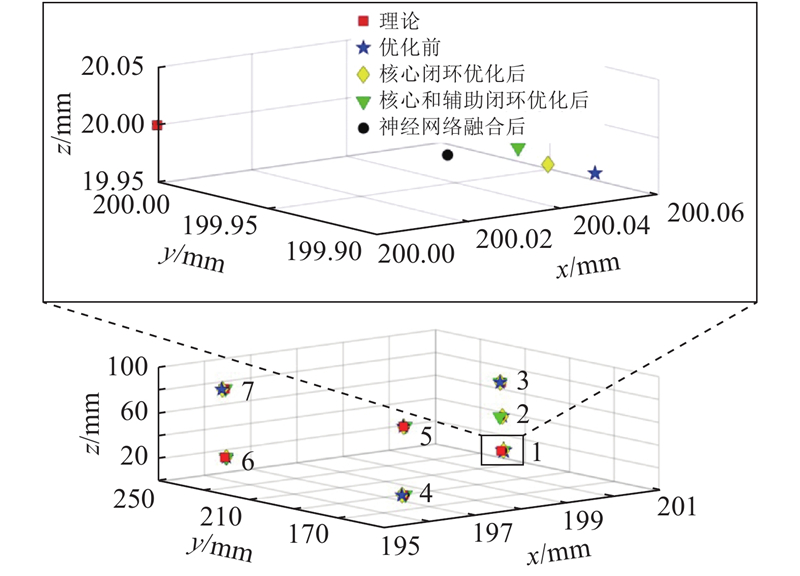
Abstract A hierarchical closed-loop optimization strategy was proposed to solve the problem of cumulative error in robot machining system. A core closed-loop composed of the laser tracker frame, robot base frame and the end tool frame was constructed. An auxiliary closed-loop composed of the laser tracker frame, end tool frame, visual measurement frame and the workpiece was constructed. A correlational closed-loop composed of the laser tracker frame, visual measurement frame and the end tool frame was constructed. Then a neural network model was constructed based on the independent optimization of three closed-loops, and the results of the closed-loops optimization were fused by using a data-driven approach in order to improve the closed-loop optimization stability of the system. Simulation experimental results show that the method can effectively reduce the cumulative error of robot machining system and improve the positioning accuracy of the robot end tool, which is conducive to guide the subsequent prototype experiment and machining application.
|
|
Received: 03 July 2020
Published: 30 July 2021
|
|
|
| Fund: 国家自然科学基金资助项目(51775376) |
|
Corresponding Authors:
Ya-bin DING
E-mail: hyhaoyan@tju.edu.cn;ybding@tju.edu.cn
|
机器人加工系统累积误差逐级闭环优化策略
针对机器人加工系统的误差累积问题,提出逐级闭环优化策略. 构建以激光跟踪仪、机器人基坐标系和末端工具坐标系组成的核心闭环,以激光跟踪仪、末端工具坐标系、视觉测量坐标系和工件组成的辅助闭环,以激光跟踪仪、视觉测量坐标系和末端工具坐标系组成的相关性闭环. 基于3个闭环独立优化,构建神经网络模型,以数据驱动的方式融合闭环优化结果,提高系统闭环优化的稳定性. 仿真实验结果表明,利用该方法有效地减小系统累积误差,提高机器人末端工具的定位精度,有助于指导后续的样机实验和加工应用.
关键词:
机器人加工,
定位精度,
累积误差,
闭环优化,
神经网络,
视觉测量
|
|
| [1] |
CHOI D G, KWAK C H, LEE S Y, et al Structural design and analyses of a fabric-covered wind turbine blade[J]. Advanced Composite Materials, 2019, 28 (6): 607- 623
doi: 10.1080/09243046.2019.1626187
|
|
|
| [2] |
DHARMAWARDHANA M, OANCEA G, RATNAWEERA A. A review of STEP-NC compliant CNC systems and possibilities of closed loop manufacturing[C]// 3rd China-Romania Science and Technology Seminar. Brasov: IOP, 2018: 012014.
|
|
|
| [3] |
TAO B, ZHAO X W, DING H Mobile-robotic machining for large complex components: a review study[J]. Science China Technological Sciences, 2019, 62 (8): 1388- 1400
doi: 10.1007/s11431-019-9510-1
|
|
|
| [4] |
HUANG T, DONG C L, LIU H T, et al. Five-degree-of-freedom hybrid robot with rotational supports: US 9, 943, 967 B2 [P]. 2018-04-17.
|
|
|
| [5] |
ZHANG Z Y, DING Y B, HUANG T, et al. A mobile robotic system for large scale manufacturing[C]// 18th International Conference in Manufacturing Research. Belfast: IOS, 2019: 67-74.
|
|
|
| [6] |
DETESAN O A, CRISAN A V A theoretical approach on determining the geometrical errors in case of articulated robot structures[J]. Applied Mathematics, Mechanics, and Engineering, 2019, 62 (1): 63- 70
|
|
|
| [7] |
HUANG C J, FAROOQ U, LIU H Y, et al A PSO-tuned fuzzy logic system for position tracking of mobile robot[J]. International Journal of Robotics and Automation, 2019, 34 (1): 84- 94
|
|
|
| [8] |
QIN Y, PENG C S, KUN Y X, et al A novel loop closure detection approach using simplified structure for low-cost LiDAR[J]. Sensors, 2020, 20 (8): 2299
doi: 10.3390/s20082299
|
|
|
| [9] |
LIANG Y Y, WU Z Z, HU J Road side unit location optimization for optimum link flow determination[J]. Compute-Aided Civil and Infrastructure Engineering, 2020, 35 (1): 61- 79
doi: 10.1111/mice.12490
|
|
|
| [10] |
JIANG P Y, JIA F, WANG Y Real-time quality monitoring and predicting model based on error propagation networks for multistage machining processes[J]. Journal of Intelligent Manufacturing, 2014, 25 (3): 521- 538
doi: 10.1007/s10845-012-0703-0
|
|
|
| [11] |
VASIN V V Modified steepest descent method for nonlinear irregular operator equations[J]. Doklady Mathematics, 2015, 91 (3): 300- 303
doi: 10.1134/S1064562415030187
|
|
|
| [12] |
GONCALVES M L N, MENEZES T C Gauss-Newton methods with approximate projections for solving constrained nonlinear least squares problems[J]. Journal of Complexity, 2020, 58: 101459
doi: 10.1016/j.jco.2020.101459
|
|
|
| [13] |
XIA K, GAO H, DING L, et al Trajectory tracking control of wheeled mobile manipulator based on fuzzy neural network and extended Kalman filtering[J]. Neural Computing and Applications, 2018, 30 (2): 447- 462
|
|
|
| [14] |
CHANG L, NIU X J, LIU T Y, et al GNSS/INS/LiDAR-SLAM integrated navigation system based on graph optimization[J]. Remote Sensing, 2019, 11 (9): 1009
doi: 10.3390/rs11091009
|
|
|
| [15] |
SCHMIDHUBER J Deep learning in neural networks: an overview[J]. Neural Networks, 2015, 61: 85- 117
doi: 10.1016/j.neunet.2014.09.003
|
|
|
| [16] |
JOUBAIR A, NUBIOLA A, BONEV I Calibration efficiency analysis based on five observability indices and two calibration models for a six-axis industrial robot[J]. SAE International Journal of Aerospace, 2013, 6 (1): 161- 168
doi: 10.4271/2013-01-2117
|
|
|
| [17] |
NGUYEN H N, LE P N, KANG H J A new calibration method for enhancing robot position accuracy by combining a robot model-based identification approach and an artificial neural network-based error compensation technique[J]. Advances in Mechanical Engineering, 2019, 11 (1): 1687814018822935
|
|
|
| [18] |
NORMAN A R, SCHÖNBERG A, GORLACH I A, et al Validation of iGPS as an external measurement system for cooperative robot positioning[J]. International Journal of Advanced Manufacturing Technology, 2013, 64 (1-4): 427- 446
doi: 10.1007/s00170-012-4004-8
|
|
|
| [19] |
RAO G, WANG G L, YANG X D, et al Normal direction measurement and optimization with a dense 3D point cloud in robotic drilling[J]. IEEE/ASME Transactions on Mechatronics, 2017, 23 (3): 986- 996
|
|
|
| [20] |
CAO C T, DO V P, LEE B R A novel indirect calibration approach for robot positioning error compensation based on neural network and hand-eye vision[J]. Applied Sciences-Basel, 2019, 9 (9): 1940
doi: 10.3390/app9091940
|
|
|
| [21] |
GALETTO M, MASTROGIACOMO L, MAISANO D, et al Cooperative fusion of distributed multi-sensor LVM (large volume metrology) systems[J]. CIRP Annals-Manufacturing Technology, 2015, 64 (1): 483- 486
doi: 10.1016/j.cirp.2015.04.003
|
|
|
| [22] |
李瑛, 成芳, 赵志林 采用结构光的大跨度销孔加工精度在线测量[J]. 浙江大学学报: 工学版, 2020, 54 (3): 557- 565
LI Ying, CHENG Fang, ZHAO Zhi-lin Machining precision online measurement of large span pin hole using structured light[J]. Journal of Zhejiang University: Engineering Science, 2020, 54 (3): 557- 565
|
|
|
| [23] |
毕运波, 徐超, 樊新田, 等 基于视觉测量的沉头孔垂直度检测方法[J]. 浙江大学学报: 工学版, 2017, 51 (2): 312- 318
BI Yun-bo, XU Chao, FAN Xin-tian, et al Method of countersink perpendicularity detection using vision measurement[J]. Journal of Zhejiang University: Engineering Science, 2017, 51 (2): 312- 318
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|