|
|
|
| Control design of spacecraft autonomous rendezvous using nonlinear models with uncertainty |
Ke-wen ZHANG1,2( ),Bai-song PAN1,2 ),Bai-song PAN1,2 |
1. College of Mechanical Engineering, Zhejiang University of Technology, Hangzhou 310023, China
2. Key Laboratory of Special Purpose Equipment and Advanced Processing Technology, Ministry of Education, Zhejiang University of Technology, Hangzhou 310023, China |
|
|
|
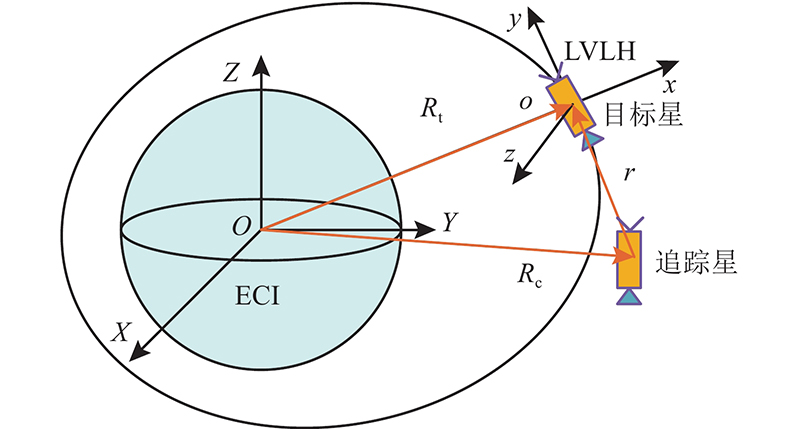
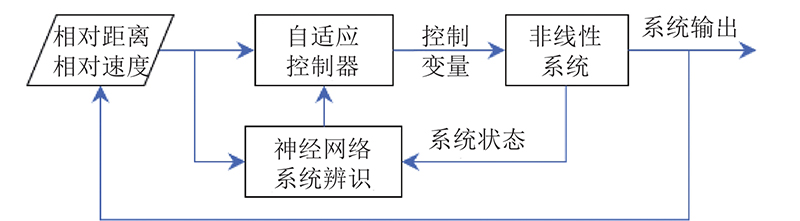
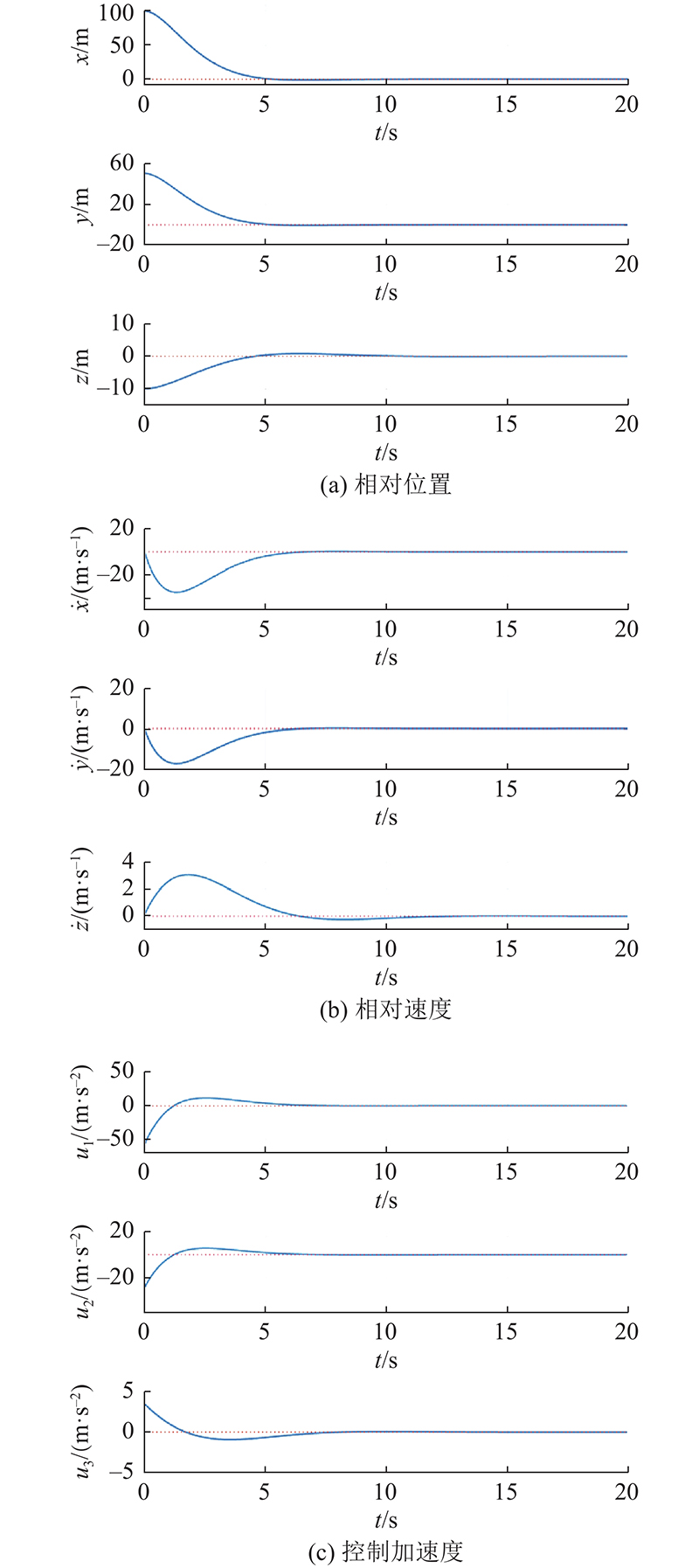
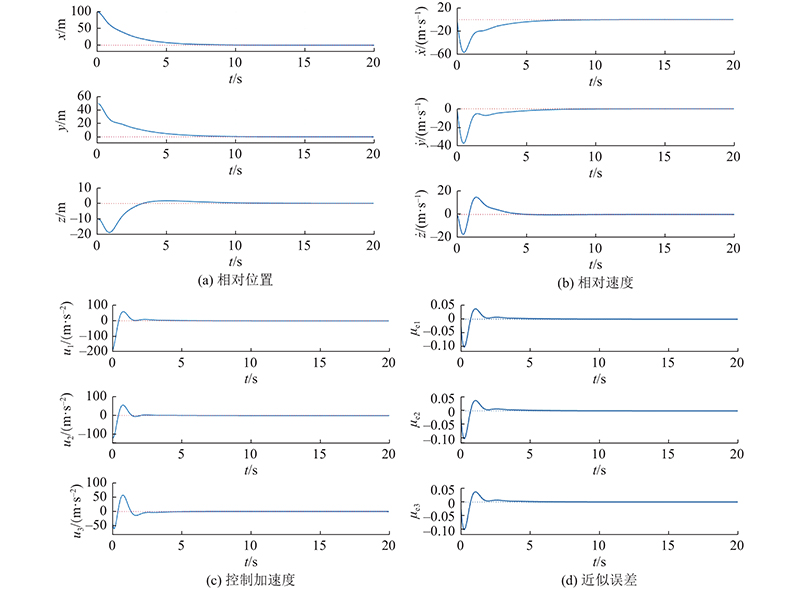
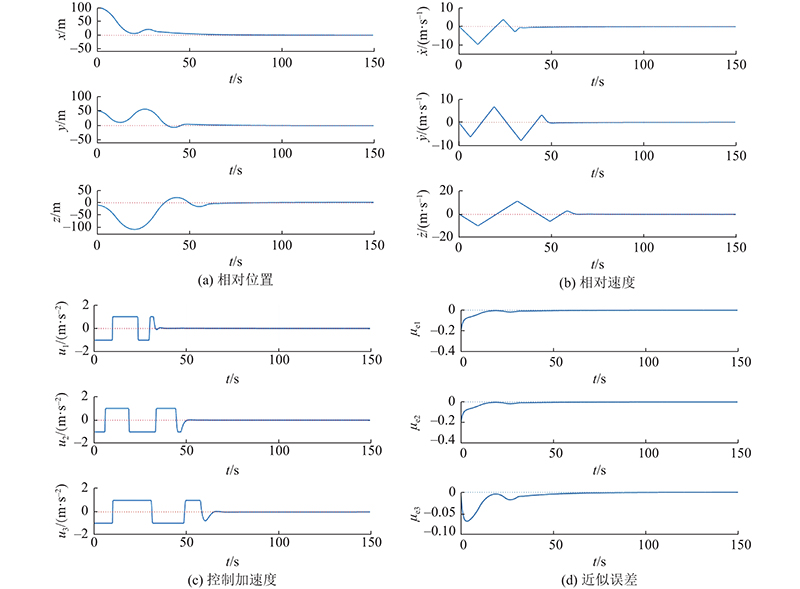
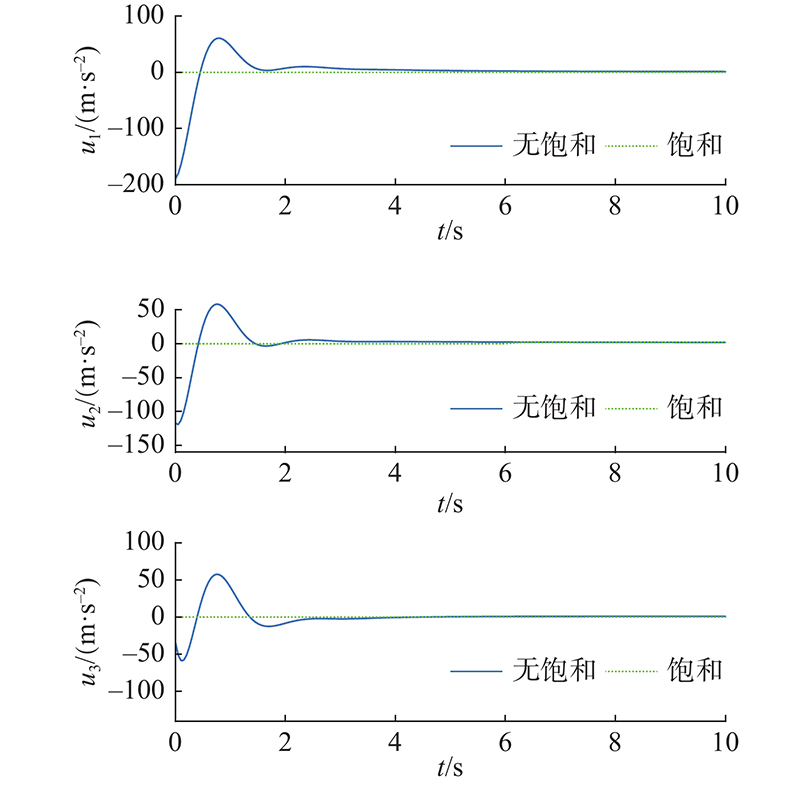
Abstract An adaptive control strategy based on the general nonlinear relative motion equation was proposed by considering the uncertainty of the spacecraft rendezvous model. A parameterization via adaptive neural networks was implemented for the linear and nonlinear uncertainties in the complex nonlinear system caused by the external disturbances and the orbital parameters of the target spacecraft. Both the backstepping technique and the Lyapunov method were utilized to achieve the control targets and guarantee the asymptotic stability of the resulting closed-loop system. An auxiliary control system was proposed to analyze the effect of input constraints in order to explore the adaptive control design of the spacecraft relative motion in the presence of both model uncertainty and input constraints. The adaptive control strategy proposed for relative motion ensured the stability of the closed-loop system, as well as the uniform ultimate boundedness of the adaptive estimation of the unknown parameters. The effectiveness of the proposed method was verified by the numerical results via the analysis and comparison of different cases.
|
|
Received: 08 May 2021
Published: 24 April 2022
|
|
|
| Fund: 浙江省“尖兵” “领雁”研发攻关计划资助项目(2022C01026);浙江工业大学独立研究项目(2018102007429) |
考虑非线性模型不确定性的航天器自主交会控制
考虑航天器交会模型不确定性的问题,提出基于一般非线性相对运动方程的自适应控制策略. 针对复杂非线性系统中由外部扰动及目标星轨道参数引起的线性与非线性不确定性问题,通过自适应神经网络对模型结构进行参数化近似. 结合自适应反推技术和李雅普诺夫稳定方法进行自适应控制器设计,能够实现控制目标,保证所得闭环系统的渐近稳定性. 为了探究同时存在模型不确定性和输入约束的情况下航天器相对运动的自适应控制设计,提出辅助控制系统来分析和解决输入约束的影响. 针对相对运动提出的自适应控制策略保证了闭环系统的稳定性,使得模型未知参数的自适应估计满足最终一致有界性. 对不同案例分析比较的数值仿真结果验证了提出控制方法的有效性.
关键词:
航天器交会,
非线性模型,
不确定性,
神经网络,
自适应控制
|
|
| [1] |
MAZAL L, PEREZ D, BEVILACQUA R, et al Spacecraft rendezvous by differential drag under uncertainties[J]. Journal of Guidance, Control, and Dynamics, 2016, 39 (8): 1721- 1733
|
|
|
| [2] |
HE S, WANG J, LIN D Elliptical orbital spacecraft rendezvous without velocity measurement[J]. Journal of Aerospace Engineering, 2016, 29 (4): 04015084
|
|
|
| [3] |
BRENTARI M, URBINA S, ARZELIER D, et al A hybrid control framework for impulsive control of satellite rendezvous[J]. IEEE Transactions on Control Systems Technology, 2019, 27 (4): 1537- 1551
|
|
|
| [4] |
ZANETTI R Optimal glideslope guidance for spacecraft rendezvous[J]. AIAA Journal of Guidance, Control, and Dynamics, 2011, 34 (5): 1593- 1597
|
|
|
| [5] |
谭天乐. 航天器交会对接的模型预测与反演制导控制[J]. 控制与决策, 2019, 34(4): 793-798.
TAN Tian-le. Model predictive and inversive guidance and control for spacecraft rendezvous and docking [J]. Control and Decision, 2019, 34(4): 793-798.
|
|
|
| [6] |
李蒙, 马晓兵 航天器远程自主交会方法设计与实现[J]. 宇航学报, 2017, 38 (9): 911- 918
LI Meng, MA Xiao-bing Development of long distance autonomous rendezvous for spacecraft[J]. Journal of Astronautics, 2017, 38 (9): 911- 918
doi: 10.3873/j.issn.1000-1328.2017.09.003
|
|
|
| [7] |
胡勇, 徐李佳, 解永春. 针对失控翻滚目标航天器的交会对接控制[J]. 宇航学报, 2015, 36(1): 47-57.
HU Yong, XU Li-jia, XIE Yong-chun. Control for rendezvous and docking with a tumbling target spacecraft [J]. Journal of Astronautics, 2015, 36(1): 47-57.
|
|
|
| [8] |
靳锴, 罗建军, 郑茂章, 等 考虑导航误差和摄动影响的椭圆轨道最优交会制导[J]. 控制理论与应用, 2018, 35 (10): 1484- 1493
JIN Kai, LUO Jian-jun, ZHENG Mao-zhang, et al Guidance design with navigation errors for relative motion in noncircular perturbed orbits[J]. Control Theory and Application, 2018, 35 (10): 1484- 1493
|
|
|
| [9] |
ZHANG K, DEMETRIOU M A. Synthesis of adaptive controllers for spacecraft rendezvous maneuvers using nonlinear models of relative motion [C]// Proceedings of the IEEE Conference on Decision and Control. Las Vegas: IEEE, 2016: 12-14.
|
|
|
| [10] |
ZHANG K, DEMETRIOU M A. Adaptive controllers for spacecraft rendezvous based on nonlinear model with unknown parameters [C]// Proceedings of AIAA Guidance, Navigation, and Control Conference. Grapevine: AIAA, 2017: 9-13.
|
|
|
| [11] |
KALUR A, SHIVAKUMAR K, SCHMID M, et al. Adaptive control for spacecraft formation flying with solar radiation pressure and reduction of secular drift [C]// Proceedings of the American Control Conference. Boston: [s. n. ], 2016: 6-8.
|
|
|
| [12] |
IMANI A, BEIGZADEH B Robust control of spacecraft rendezvous on elliptical orbits: optimal sliding mode and backstepping sliding mode approaches[J]. Proceedings of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering, 2016, 230 (10): 1975- 1989
|
|
|
| [13] |
INNOCENTI M, TARTAGLIA V. Game theoretic strategies for spacecraft rendezvous and motion synchronization [C]//Proceedings of AIAA Guidance, Navigation, and Control Conference. San Diego: AIAA, 2016: 4-8.
|
|
|
| [14] |
ZHANG G, YE D Optimal short-range rendezvous using on–off constant thrust[J]. Aerospace Science and Technology, 2017, 69: 209- 217
|
|
|
| [15] |
FARRELL J A, POLYCARPOU M M. Adaptive approximation based control: unifying neural, fuzzy and traditional adaptive approximation approaches [M]. New York: Wiley, 2006: 46-48.
|
|
|
| [16] |
ROVITHAKIS G A, CHRISTODOULOU M A. Adaptive control with recurrent high-order neural networks: theory and industrial applications [M]. [S. l. ]: Springer, 2012: 9-27.
|
|
|
| [17] |
GE S, HANG C, LEE T, et al. Stable adaptive neural network control [M]. New York: Springer, 2013: 27-46.
|
|
|
| [18] |
SPOONER J, MAGGIORE M, ORDONEZ R, et al. Stable adaptive control and estimation for nonlinear systems: neural and fuzzy approximator techniques [M]. New York: Wiley, 2002: 6-10.
|
|
|
| [19] |
ALFRIEND K, VADALI R, GURFIL P, et al. Spacecraft formation flying: dynamics, control and navigation [M]. Oxford: Butterworth-Heinemann, 2009: 60-64.
|
|
|
| [20] |
CURTIS H D. Orbital mechanics for engineering students [M]. Oxford: Butterworth-Heinemann, 2013: 66-72.
|
|
|
| [21] |
KAPLAN M H. Modern spacecraft dynamics and control [M]. [S. l. ]: Wiley, 1976.
|
|
|
| [22] |
ZHANG T, GE S S, HANG C C Adaptive neural network control for strict-feedback nonlinear systems using backstepping design[J]. Automatica, 2000, 36 (12): 1835- 1846
|
|
|
| [23] |
LEWIS F L, YESILDIREK A, LIU K Multilayer neural-net robot controller with guaranteed tracking performance[J]. IEEE Transactions on Neural Networks, 1996, 7 (2): 388- 399
|
|
|
| [24] |
WANG D, HUANG J Adaptive neural network control for a class of uncertain nonlinear systems in pure-feedback form[J]. Automatica, 2002, 38 (8): 1365- 1372
|
|
|
| [25] |
HORN R A, JOHNSON C R. Matrix analysis [M]. 2nd ed. Cambridge: Cambridge University Press, 2013.
|
|
|
| [26] |
KRSTIC M, KANELLAKOPOULOS I, KOKOTOVIC P V. Nonlinear and adaptive control design [M]. New York: Wiley, 1995: 99-110.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|