|
|
|
| Wheel slip tracking control of vehicle based on adaptive fast terminal sliding mode control method |
Jing LI1( ),Chen WANG1,Jia-xu ZHANG1,2,*() ),Chen WANG1,Jia-xu ZHANG1,2,*() |
1. State Key Laboratory of Automotive Simulation and Control, Jilin University, Changchun 130011, China
2. Intelligent Network R&D Institute, China FAW Group Limited Company, Changchun 130011, China |
|
|
|
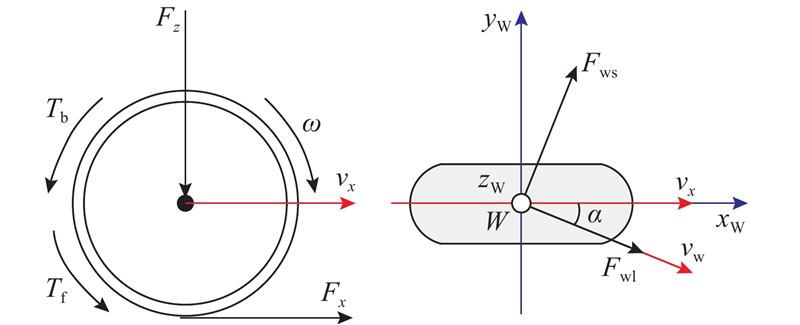
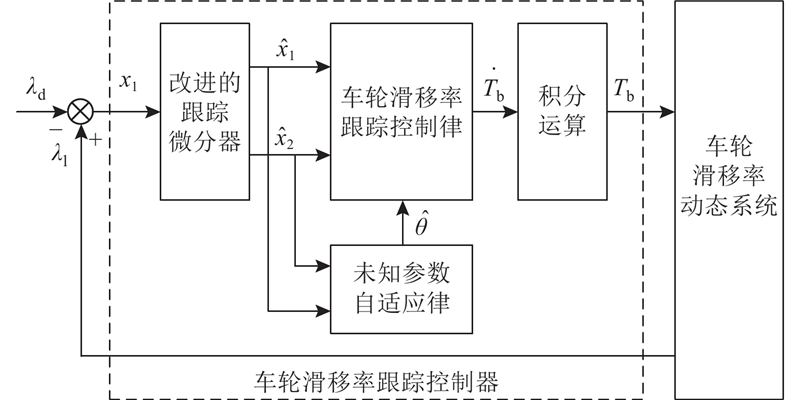
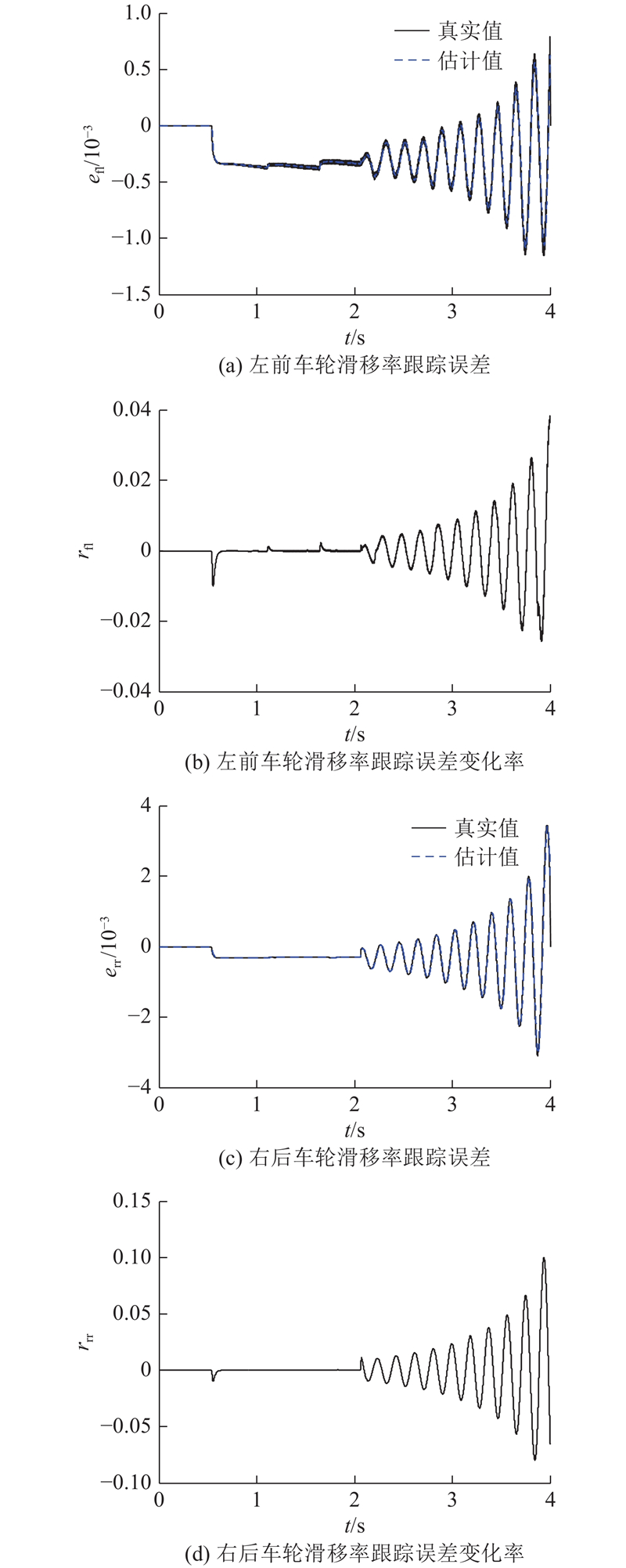
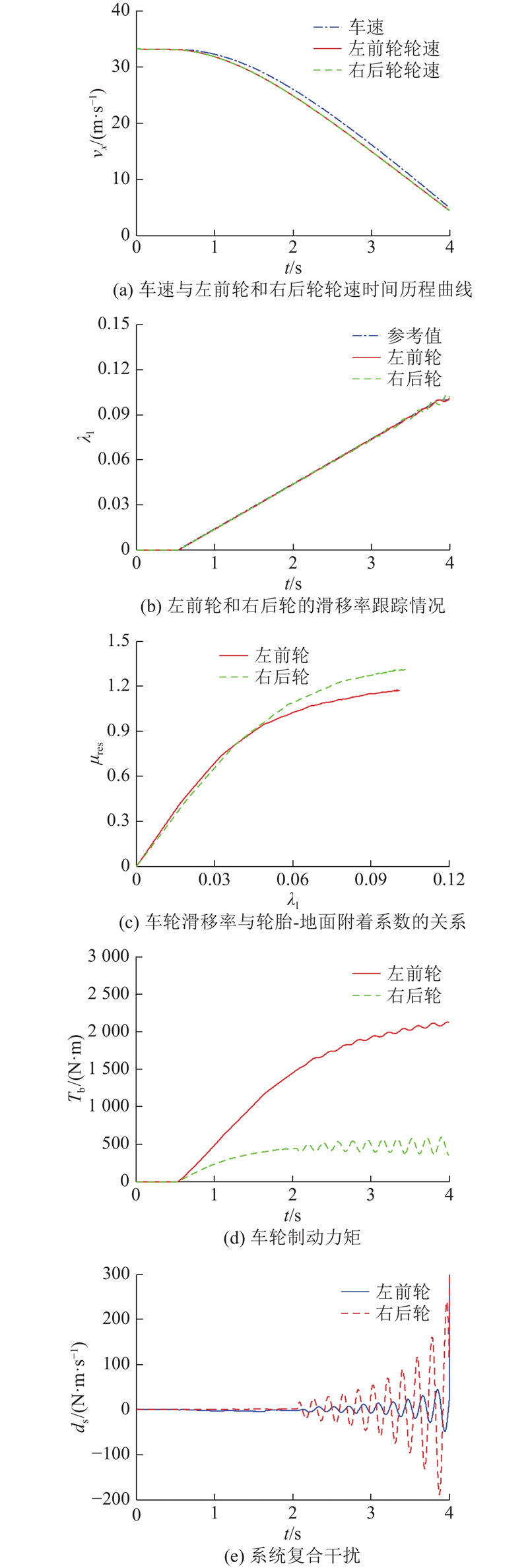
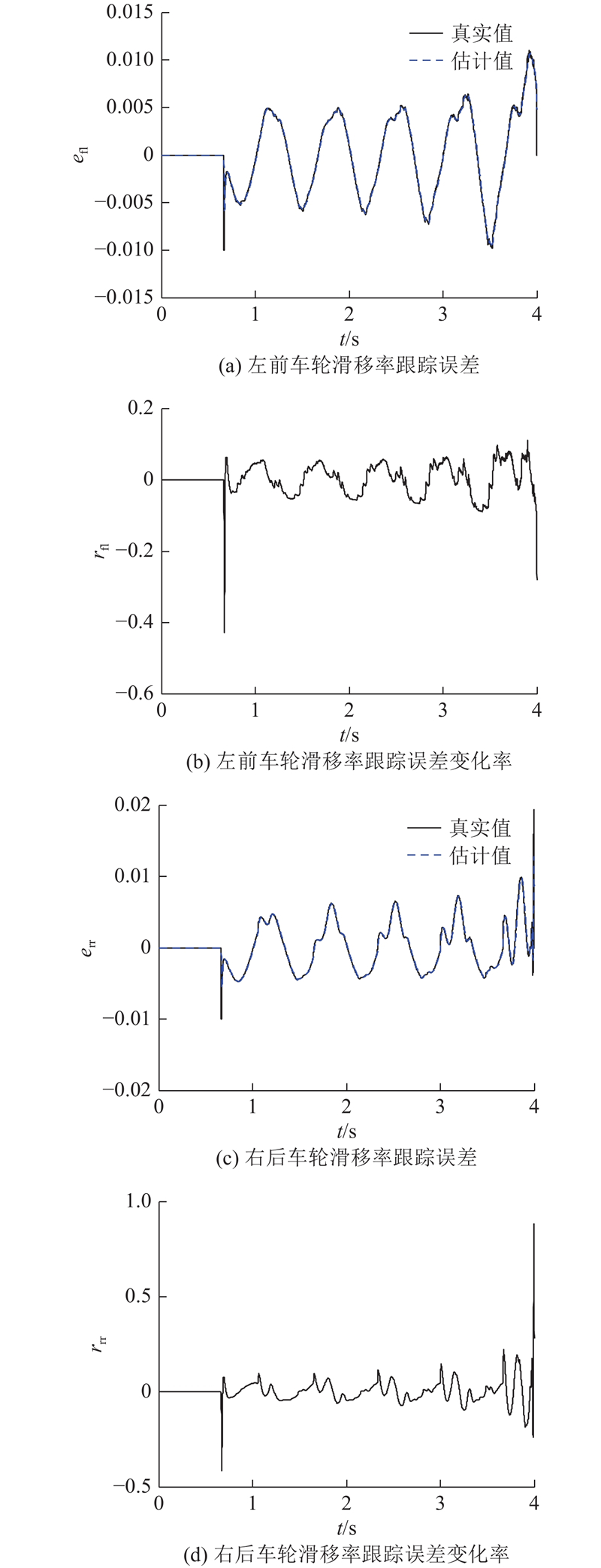
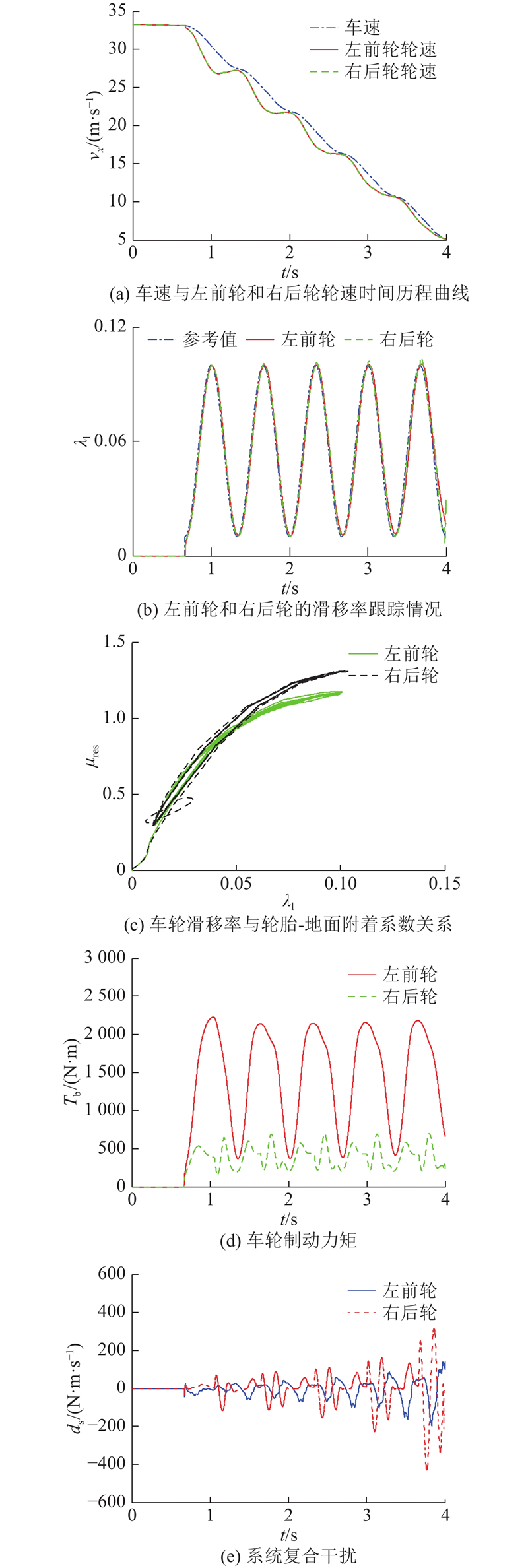
Abstract A novel wheel slip tracking control strategy was proposed based on adaptive fast terminal sliding model control method aiming at the requirement of the vehicle for the continuous, fast and stable wheel slip tracking control. The wheel slip tracking control model was established based on Burckhardt tire model. The uncertainty during the process of model simplification and the influence of the tire lateral force on the tire longitudinal force in the wheel slip tracking control model were considered as the lumped uncertainty and the unknown parameter, respectively. The modified tracking differentiator was deduced based on hyperbolic tangent function and terminal attraction factor in order to smooth the wheel slip tracking error and estimate the derivative of the wheel slip tracking error. The wheel slip rate tracking control law with strong robustness for the system uncertainty was proposed based on the adaptive fast terminal sliding mode control theory according to the wheel slip tracking control model and the outputs of the modified tracking differentiator. The adaptive law was proposed based on projection operator theory to compensate the unknown parameter. The asymptotic stability of the closed-loop system was proved using the LaSalle invariance principle. The feasibility and effectiveness of the proposed wheel slip tracking control strategy was verified based on vehicle dynamics simulation software. Results show that the proposed wheel slip tracking control strategy has high accuracy and strong robustness.
|
|
Received: 24 December 2019
Published: 27 January 2021
|
|
|
|
Corresponding Authors:
Jia-xu ZHANG
E-mail: liye1129@163.com;zhjx_686@163.com
|
基于自适应快速终端滑模的车轮滑移率跟踪控制
针对汽车对连续、快速和稳定的车轮滑移率跟踪控制的需求,提出基于自适应快速终端滑模的车轮滑移率跟踪控制策略. 基于Burckhardt轮胎模型建立车轮滑移率跟踪控制模型,将模型简化过程中的不确定性考虑成复合干扰项,将轮胎侧向力对纵向力的影响考虑成未知参数. 利用双曲正切函数和终端吸引因子设计改进的跟踪微分器,平滑车轮滑移率跟踪误差和估计车轮滑移率跟踪误差的一阶导数. 以车轮滑移率跟踪控制模型和改进的跟踪微分器输出为基础,基于自适应快速终端滑模控制理论,设计对复合干扰项具有强鲁棒性的车轮滑移率跟踪控制律;基于投影算子理论设计自适应律来实时补偿未知参数,利用LaSalle不变性原理证明了闭环系统的渐近稳定性. 利用车辆动力学软件仿真验证提出的控制律的可行性和有效性. 结果表明,提出的车轮滑移率跟踪控制策略具有精度高和鲁棒性强的优点.
关键词:
汽车动力学,
车轮滑移率跟踪控制,
自适应控制,
快速终端滑模控制
|
|
| [1] |
KUO C Y, YEH E C A four-phase control scheme of an anti-skid brake system for all road conditions[J]. Proceeding of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 1992, 206 (44): 275- 283
|
|
|
| [2] |
TANELLI M, OSORIO G, BERNARDO M D, et al Existence, stability and robustness analysis of limit cycles in hybrid anti-lock braking systems[J]. International Journal of Control, 2009, 82 (4): 659- 678
doi: 10.1080/00207170802203598
|
|
|
| [3] |
JING H H, LIU Z Y, CHEN H A switched control strategy for antilock braking system with on/off valves[J]. IEEE Transactions on Vehicular Technology, 2011, 60 (4): 1470- 1484
doi: 10.1109/TVT.2011.2125806
|
|
|
| [4] |
马付雷. 汽车ABS逻辑门限值控制算法研究与实现[D]. 重庆: 重庆邮电大学, 2011.
|
|
|
| [5] |
王伟达, 丁能根, 张为, 等 ABS逻辑门限值自调整控制方法研究与试验验证[J]. 机械工程学报, 2010, 46 (22): 90- 104
WANG Wei-da, DING Neng-gen, ZHANG Wei, et al Research and verification of the logic threshold self-adjusting control method for ABS[J]. Journal of Mechanical Engineering, 2010, 46 (22): 90- 104
doi: 10.3901/JME.2010.22.090
|
|
|
| [6] |
PASILLAS-LEPINE W, LORIA A, GERARD M Design and experimental validation of a nonlinear wheel slip control algorithm[J]. Automatica, 2012, 48: 1852- 1859
doi: 10.1016/j.automatica.2012.05.073
|
|
|
| [7] |
SHIM T, CHANG S, LEE S Investigation of sliding-surface design on the performance of sliding mode controller in antilock braking systems[J]. IEEE Transactions on Vehicular Technology, 2008, 57 (2): 747- 759
doi: 10.1109/TVT.2007.905391
|
|
|
| [8] |
YU H X, QI Z Q, DUAN J M, et al Multiple model adaptive backstepping control for antilock braking system based on LuGre dynamic tyre model[J]. International Journal of Vehicle Design, 2015, 69 (1-4): 168- 184
|
|
|
| [9] |
MIRZAEI M, MIRZAEINEJAD H Optimal design of a non-linear controller for anti-lock braking system[J]. Transportation Research Part C, 2012, 24: 19- 35
doi: 10.1016/j.trc.2012.01.008
|
|
|
| [10] |
AMODEO M, FERRARA A, TERZAGHI R, et al Wheel slip control via second-order sliding-mode generation[J]. IEEE Transactions on Intelligent Transportation Systems, 2010, 11 (1): 122- 131
doi: 10.1109/TITS.2009.2035438
|
|
|
| [11] |
TANELLI M, ASTOLFI A, SAVARESI S M Robust nonlinear output feedback control for brake by wire control systems[J]. Automatica, 2008, 44: 1078- 1083
doi: 10.1016/j.automatica.2007.08.020
|
|
|
| [12] |
JOHANSEN T A, PETERSEN I, KALKKUHL J, et al Gain-scheduled wheel slip control in automotive brake systems[J]. IEEE Transactions on Control Systems Technology, 2003, 11 (6): 799- 811
doi: 10.1109/TCST.2003.815607
|
|
|
| [13] |
ZHANG J X, LI J Adaptive backstepping sliding mode control for wheel slip tracking of vehicle with uncertainty observer[J]. Measurement and Control, 2018, 51 (9/10): 396- 405
|
|
|
| [14] |
ZHANG J X, LI J Robust backstepping sliding mode control with L2-gain performance for reference input wheel slip tracking of vehicle[J]. Information Technology and Control, 2019, 48 (4): 660- 672
|
|
|
| [15] |
HE Y G, LU C D, SHEN J, et al Design and analysis of output feedback constraint control for antilock braking system with time-varying slip ratio[J]. Mathematical Problems in Engineering, 2019, 2019: 1- 11
|
|
|
| [16] |
HE Y G, LU C D, SHEN J, et al Design and analysis of output feedback constraint control for antilock braking system based on Burckhardt's model[J]. Assembly Automation, 2019, 39 (4): 497- 513
doi: 10.1108/AA-08-2018-0119
|
|
|
| [17] |
KIENCKE U, NIELSEN L. Automotive control systems [M]. Berlin: Springer, 2000.
|
|
|
| [18] |
申帅, 张葆, 李贤涛, 等 基于跟踪微分器的加速度反馈控制[J]. 吉林大学学报: 工学版, 2017, 47 (4): 1217- 1224
SHEN Shuai, ZHANG Bao, LI Xian-tao, et al Acceleration feedback control based on tracking differentiator[J]. Journal of Jilin University: Engineering and Technology Edition, 2017, 47 (4): 1217- 1224
|
|
|
| [19] |
谭诗利, 雷虎民, 王鹏飞 应用跟踪微分器的高超声速飞行器的反演控制[J]. 宇航学报, 2019, 40 (6): 673- 683
TAN Shi-li, LEI Hu-min, WANG Peng-fei Backstepping control for hypersonic vehicle with a novel tracking differentiator[J]. Journal of Astronautics, 2019, 40 (6): 673- 683
|
|
|
| [20] |
姜长生, 吴庆宪, 费树岷, 等. 现代非线性系统鲁棒控制基础[M]. 哈尔滨: 哈尔滨工业大学出版社, 2012.
|
|
|
| [21] |
HAN J Q, WANG W Nonlinear tracking differentiator[J]. Journal of Systems Science and Mathematical Sciences, 1994, 14 (2): 177- 183
|
|
|
| [22] |
YANG L, YANG J Y Nonsingular fast terminal sliding-mode control for nonlinear dynamical systems[J]. International Journal of Robust and Nonlinear Control, 2011, 21: 1865- 1879
doi: 10.1002/rnc.1666
|
|
|
| [23] |
ABRAMOWITZ M, STEGUN I A. Handbook of mathematical functions: with formulas, graphs, and mathematical tables [M]. New York: Dover, 1972.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|