| Mechanical Engineering |
|


|
|
|
| Emergency braking control strategy for high speed electric drive tracked vehicle |
Zhao-meng CHEN( ),Xiao-jun ZHOU*(),Chen-long YANG,Hao-liang LV,Jie-chao WEI ),Xiao-jun ZHOU*(),Chen-long YANG,Hao-liang LV,Jie-chao WEI |
| School of Mechanical Engineering, Zhejiang University, Hangzhou 310027, China |
|
|
|
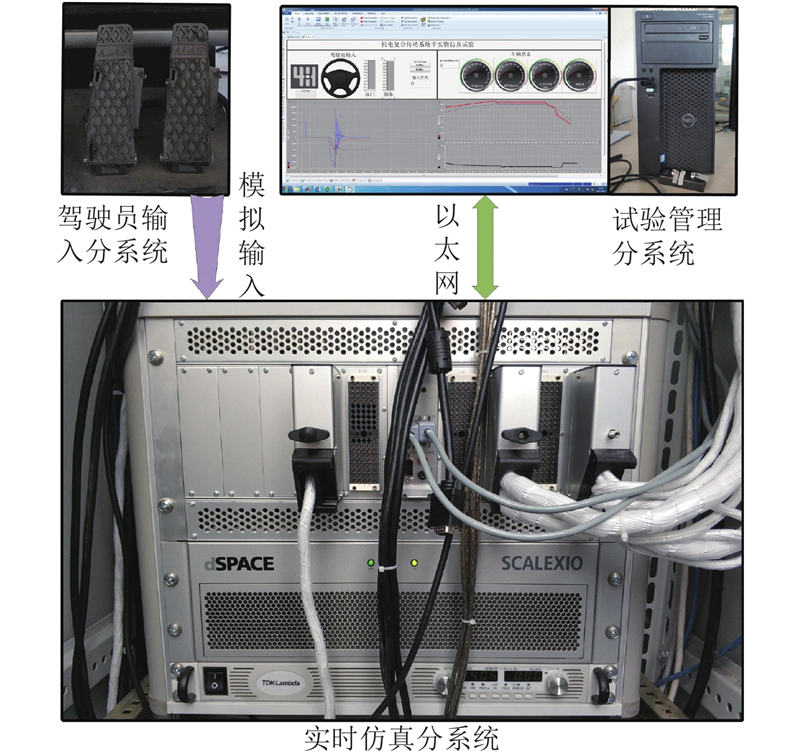
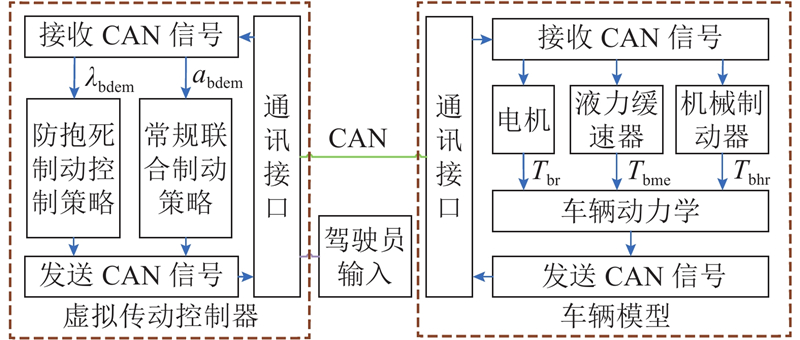
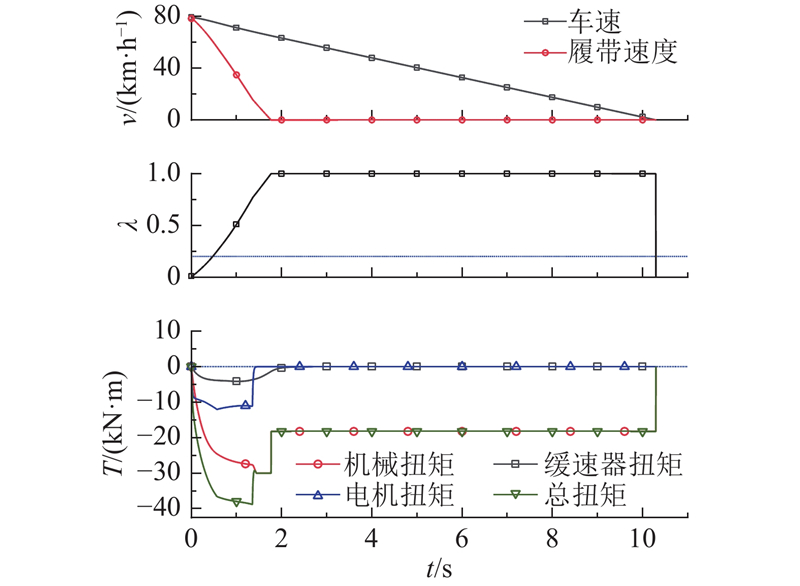
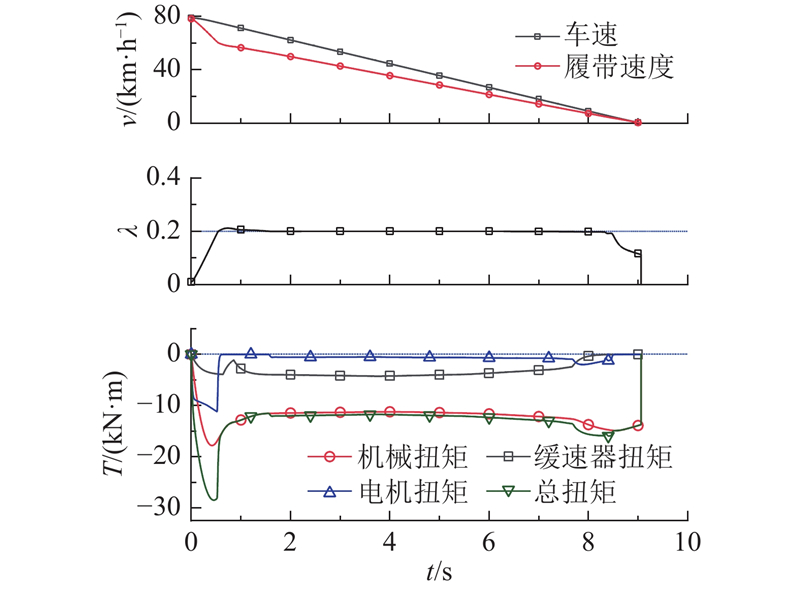
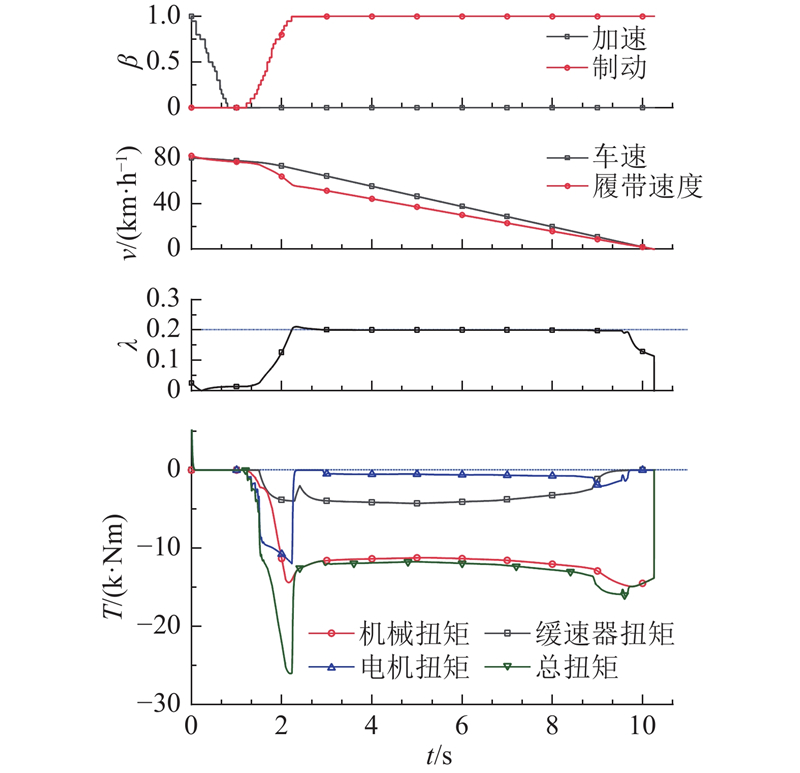
Abstract A comprehensive combined anti-lock braking strategy was proposed, in order to improve the braking performance of high speed electric drive tracked vehicles and reduce the stopping distance when braking on low adhesion grounds. This strategy consisted of a slip ratio controller which was based on robust sliding mode control, a rule-based braking torque pre-allocating method and a feedforward compensating algorithm. The strategy was designed according to modelling and analysis of the dynamics of high speed electric drive tracked vehicles, track-ground conditions as well as their braking actuators which were the mechanical brakes, permanent magnet synchronous motors and the hydraulic retarders. A semi-physical-in-loop (SPIL) test system, which consisted of a driver input subsystem, a test managing subsystem and a real-time simulating subsystem, was established based on a dSPACE SCALEXIO real-time host machine equipped with DS2680 IO board and DS2671 Bus board. Several real-time simulations and HIL tests, which included real driver inputs in the loop, were conducted under the situation of braking on snow from an initial velocity of 80 km/h. The simulation and test results show that, compared with traditional methods, this strategy can make better use of ground adhesion, keep the slip ratio stays in desired region more efficiently and reduce the stopping distance.
|
|
Received: 23 October 2019
Published: 05 March 2020
|
|
|
|
Corresponding Authors:
Xiao-jun ZHOU
E-mail: chernzm@zju.edu.cn;cmeesky@163.com
|
高速电驱动履带车辆紧急制动控制策略
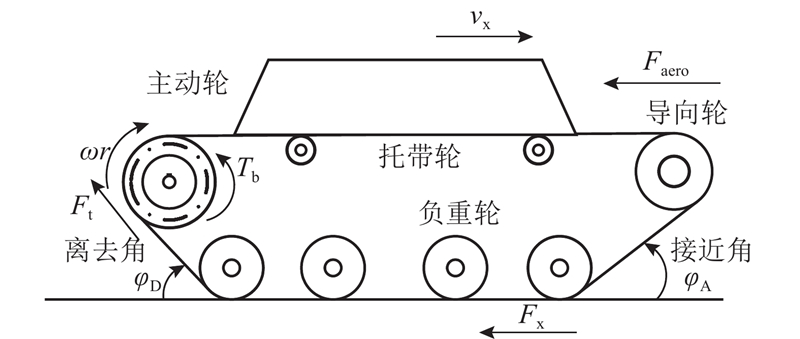
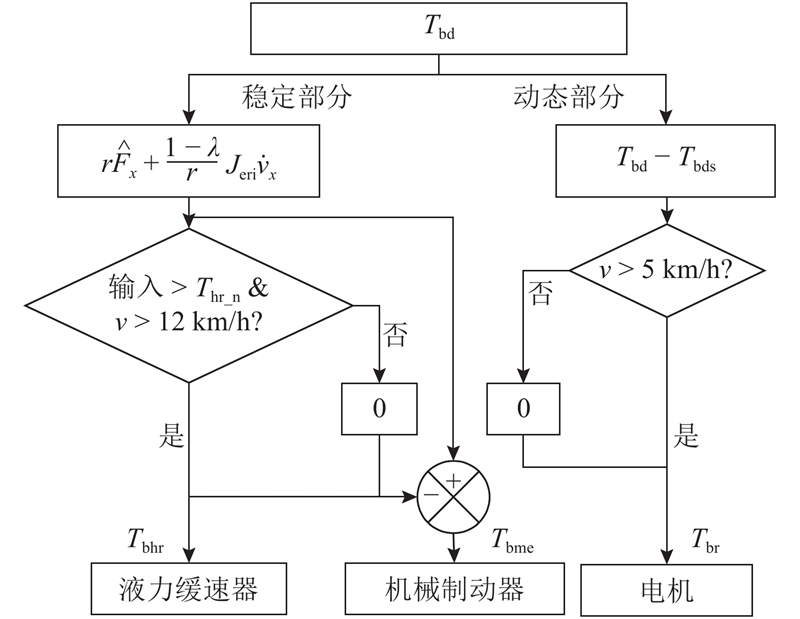
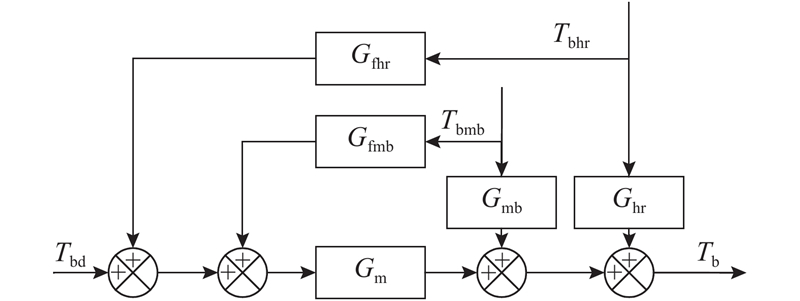
为了改善高速双侧电机驱动履带车辆在履带-地面接触条件较差时紧急制动的操控性能并减少制动距离,通过对履带车辆直线行驶动力学和其机械制动器、永磁同步电机及液力缓速器等制动执行机构进行动力学建模分析,提出基于滑模鲁棒控制、制动扭矩预分配规则和前馈补偿控制的机电液联合紧急制动防抱死控制策略. 以配备有DS2680 IO板卡和DS2671总线板卡的dSPACE SCALEXIO实时主机为核心搭建驾驶员输入在环的半实物在环,并针对高速双侧电机驱动履带车辆在雪地上以初速度为80 km/h进行紧急制动的工况,进行实时仿真和驾驶员在环试验. 仿真和试验结果表明:相对于常规履带车辆紧急制动控制方法,提出的策略能够更有效地将车辆滑移率保持在合理范围内,更好地利用地面附着力,并缩短了制动距离.
关键词:
电驱动,
履带车辆,
紧急制动,
滑模控制,
半实物在环试验
|
|
| [1] |
邹渊, 孙逢春, 张承宁 电传动履带车辆双侧驱动快速控制原型开发[J]. 北京理工大学学报, 2007, 27 (1): 29- 33
ZOU Yuan, SUN Feng-chun, ZHANG Cheng-ning Rapid control prototype development of dual-motor drive electric tracked vehicle[J]. Transaction of Beijing Institute of Technology, 2007, 27 (1): 29- 33
doi: 10.3969/j.issn.1001-0645.2007.01.008
|
|
|
| [2] |
邹渊, 孙逢春, 张承宁, 等 履带车辆双侧电机驱动系统匹配设计[J]. 北京理工大学学报, 2008, 28 (1): 41- 44
ZOU Yuan, SUN Feng-chun, ZHANG Cheng-ning, et al Matching design of the drive system in a dual-motor drive tracked vehicle[J]. Transaction of Beijing Institute of Technology, 2008, 28 (1): 41- 44
|
|
|
| [3] |
ZHAO G, LV J. Fuzzy PID control on combined braking system of tracked vehicle with braking energy recovery system[C] // 2010 International Conference on Computer, Mechatronics, Control and Electronic Engineering. Changchun: IEEE, 2010: 515-518.
|
|
|
| [4] |
马田, 盖江涛, 马晓枫 履带车辆电传动系统两段式机电联合制动策略研究[J]. 车辆与动力技术, 2010, (3): 33- 37
MA Tian, GAI Jiang-tao, MA Xiao-feng Study on two-segment electric-mechanical composite braking strategy of tracked vehicle hybrid transmission system[J]. Vehicle and Power Technology, 2010, (3): 33- 37
doi: 10.3969/j.issn.1009-4687.2010.03.008
|
|
|
| [5] |
生辉, 盖江涛, 李春明, 等 高速电驱动履带车辆联合制动转矩动态协调控制研究[J]. 兵工学报, 2017, 38 (5): 1027- 1034
SHENG Hui, GAI Jiang-tao, LI Chun-ming, et al Coordinated control of high speed electric drive tracked vehicle[J]. Acta Armamentarii, 2017, 38 (5): 1027- 1034
doi: 10.3969/j.issn.1000-1093.2017.05.024
|
|
|
| [6] |
生辉, 盖江涛, 杜明刚, 等 高速电驱动履带车辆联合制动实时仿真研究[J]. 太原理工大学学报, 2017, 48 (1): 79- 85
SHENG Hui, GAI Jiang-tao, DU Ming-gang, et al Research on real time simulation of composite braking for high speed electric drive tracked vehicle[J]. Journal of Taiyuan University of Technology, 2017, 48 (1): 79- 85
|
|
|
| [7] |
汪明德, 赵毓芹, 祝嘉光. 坦克行驶原理[M]. 北京: 国防工业出版社, 1983.
|
|
|
| [8] |
ZHOU L, LUO Y G, YANG D G, et al. A novel brake control strategy for electric vehicles based on slip trial method [C] // 2007 IEEE International Conference on Vehicular Electronics and Safety (ICVES 2008). Beijing: IEEE, 2007: 225-230.
|
|
|
| [9] |
ZHANG J, LV C, YUE X, et al. Development of the electrically-controlled regenerative braking system for electrified passenger vehicle [R]. SAE Technical Paper, 2013.
|
|
|
| [10] |
LIANG L, LI X J, WANG X Y, et al Transient switching control strategy from regenerative braking to anti-lock braking with a semi-brake-by-wire system[J]. Vehicle System Dynamics, 2016, 54 (2): 231- 257
doi: 10.1080/00423114.2015.1129059
|
|
|
| [11] |
PATRA N, DATTA K. Sliding mode controller for wheel-slip control of anti-lock braking system [C] // 2012 IEEE International Conference on Advanced Communication Control and Computing Technologies (ICACCCT). Ramanathapuram: IEEE, 2012: 385-391.
|
|
|
| [12] |
HAMZAH N, ARIPIN M K, SAM Y M, et al. Second order sliding mode controller for longitudinal wheel slip control[C] // 2012 IEEE 8th International Colloquium on Signal Processing and its Applications(CSPA). Malacca: IEEE, 2012: 138-143.
|
|
|
| [13] |
MILLER J I, CEBON D A high performance pneumatic braking system for heavy vehicles[J]. Vehicle System Dynamics, 2010, 48 (Suppl.1): 373- 392
|
|
|
| [14] |
BERA T K, BHATTACHARYA K, SAMANTARY A K Bond graph model-based evaluation of a sliding mode controller for a combined regenerative and antilock braking system[J]. Proceedings of the Institution of Mechanical Engineers, Part I: Journal of Systems and Control Engineering, 2011, 225 (7): 918- 934
doi: 10.1177/2041304110394558
|
|
|
| [15] |
NADEAU J, BOISVERT M, MICHEAU P. Implementation of a cooperative strategy between a vehicle's mechanical and regenerative brake system [C] // 2014 IEEE Vehicle Power and Propulsion Conference (VPPC). Coimbra: IEEE, 2014: 1-6.
|
|
|
| [16] |
FAN Z, KOREN Y, WEHE D. A simple traction control for tracked vehicles [C] // Proceedings of 1995 American Control Conference(ACC'95). Seattle: IEEE, 1995: 1176-1177.
|
|
|
| [17] |
杨家军, 周晓军 履带车辆台架试验台负载模拟方法研究[J]. 振动与冲击, 2013, 32 (9): 68- 72
YANG Jia-jun, ZHOU Xiao-jun Load emulation of track vehicle on test bed[J]. Journal of Vibration and Shock, 2013, 32 (9): 68- 72
doi: 10.3969/j.issn.1000-3835.2013.09.013
|
|
|
| [18] |
WANG Z, LV H, ZHOU X, et al Design and modeling of a test bench for dual-motor electric drive tracked vehicles based on a dynamic load emulation method[J]. Sensors, 2018, 18 (7): 1993
doi: 10.3390/s18071993
|
|
|
| [19] |
PACEJKA H B, BESSELINK I J M Magic formula tyre model with transient properties[J]. Vehicle System Dynamics, 1997, 27 (Suppl.1): 234- 249
|
|
|
| [20] |
CANUDAS-DE-WIT C, TSIOTRAS P, VELENIS E Dynamic friction models for longitudinal road/tire interaction: theoretical advances[J]. Vehicle System Dynamics, 2003, 39 (3): 189- 226
doi: 10.1076/vesd.39.3.189.14152
|
|
|
| [21] |
BEKKER M G. Introduction to terrain-vehicle systems [M]. Michigan: The University of Michigan Press, 1969: 415-424.
|
|
|
| [22] |
WONG J Y. Theory of ground vehicles [M]. 4th ed. Hoboken: Wiley, 2008: 89-135.
|
|
|
| [23] |
张舒阳, 张豫南, 宁克焱, 等 高速履带车辆制动能量与制动力分布规律预测方法研究[J]. 兵工学报, 2019, 40 (5): 904- 914
ZHANG Shu-yang, ZHANG Yu-nan, Ning Ke-yan, et al Research on forecasting methods of braking energy /force distribution for high speed tracked vehicles[J]. ACTA ARMAMENTARII, 2019, 40 (5): 904- 914
doi: 10.3969/j.issn.1000-1093.2019.05.002
|
|
|
| [24] |
李同飞, 王红岩, 芮强, 等 履带车辆水泥路面的牵引力-滑转率关系的计算与试验[J]. 装甲兵工程学院学报, 2014, 28 (6): 38- 43
LI Tong-fei, WANG Hong-yan, RUI Qiang, et al Calculation and test of relationship between traction force and slip ratio for tracked vehicles on concrete ground[J]. Journal of Academy of Armored Force Engineering, 2014, 28 (6): 38- 43
|
|
|
| [25] |
栗浩展, 王红岩, 芮强, 等 履带车辆地面牵引力的计算与试验验证[J]. 装甲兵工程学院学报, 2015, (01): 40- 44+109
LI Hao-zhan, WANG Hong-yan, RUI Qiang, et al Calculation and testing verification of ground traction of tracked vehicles[J]. Journal of Academy of Armored Force Engineering, 2015, (01): 40- 44+109
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|