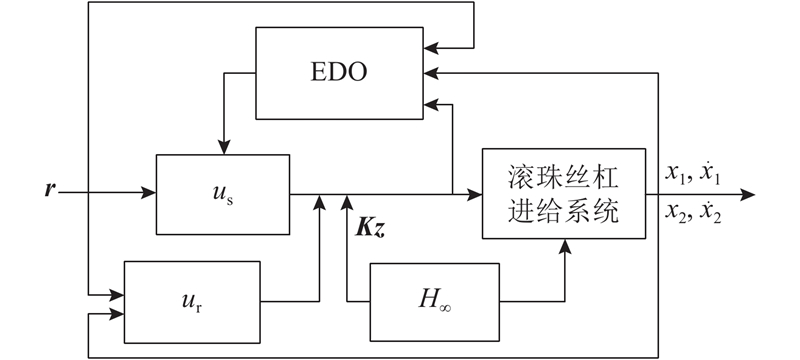
A mathematical model with uncertain parameters was established considering the dynamic characteristics of ball screw drives. A sliding mode controller with H∞ performance was designed to eliminate the influence of uncertainties. An exponential disturbance observer was designed to compensate the unknown disturbances of the system. The analyses prove that the control method has L2 gain performance. The trajectory tracking experiments were carried out on the experiment platform of ball screw drives. Results show that the maximum tracking error is 16.85 μm by using H∞ sliding mode controller and 10.18 μm by using H∞ sliding mode controller with the designed observer. After adding a 25 kg mass block on the table, the maximum tracking error is 15.61 μm by using the proposed controller with the designed observer. Results prove that the controller has good performance. The designed observer can improve the control performance. The proposed control method has good performance by comparison with a traditional proportion-proportion integral controller.
Jian LI,Wen-cheng TANG. Sliding mode control for ball screw drives based on H∞ theory. Journal of ZheJiang University (Engineering Science), 2020, 54(8): 1497-1504.
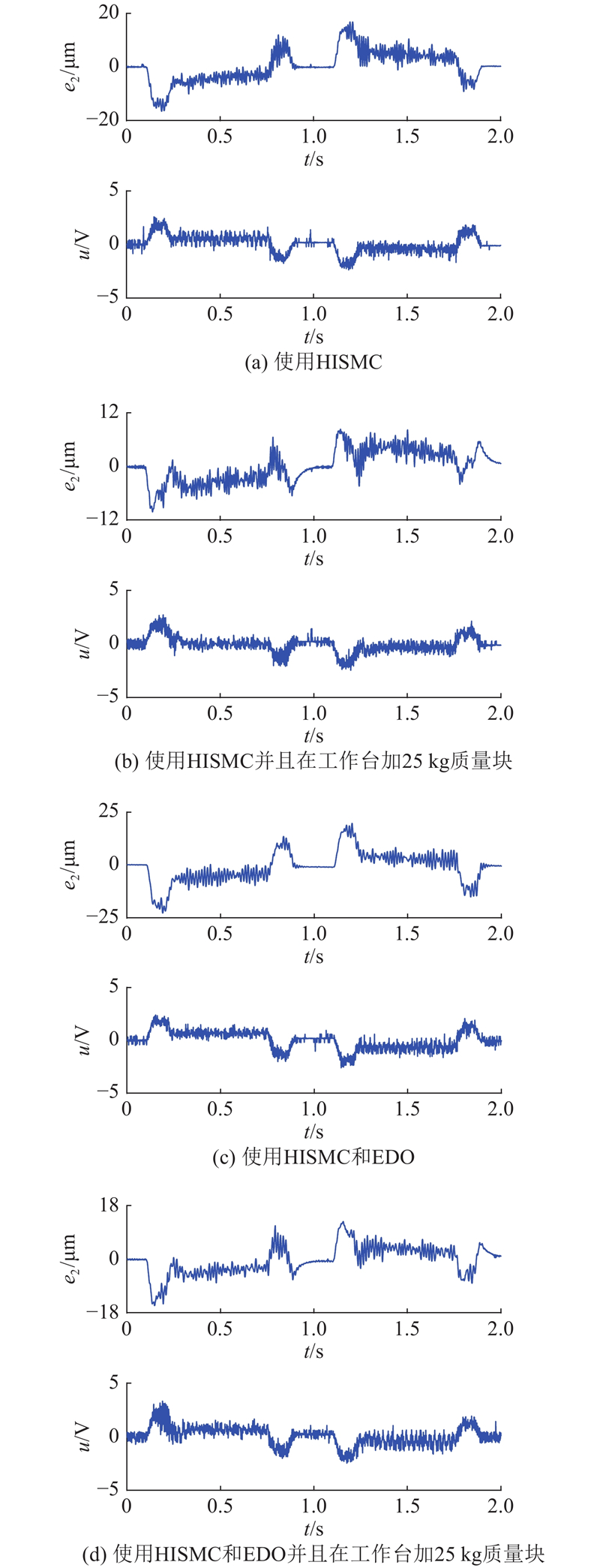
Fig.7HISMC and EDO trajectory tracking experiment results
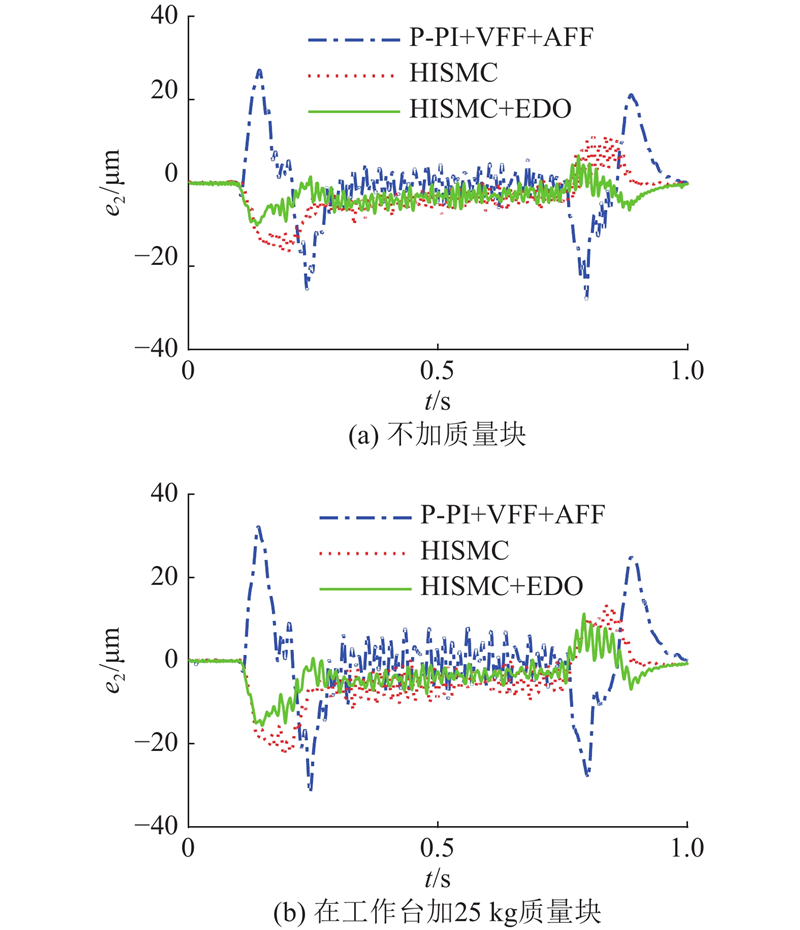
Fig.8Comparison of trajectory tracking experiment results between P-PI+VFF+AFF, HISMC and HISMC+EDO
[1]
赵万华, 张俊, 刘辉, 等 数控机床精度评价新方法[J]. 中国工程科学, 2013, 15 (1): 93- 98 ZHAO Wan-hua, ZHANG Jun, LIU Hui, et al New evaluation method on the precision of NC machine tools[J]. Engineering Sciences, 2013, 15 (1): 93- 98
doi: 10.3969/j.issn.1009-1742.2013.01.018
[2]
卢秉恒, 赵万华, 张俊, 等 高速高加速下的进给系统机电耦合[J]. 机械工程学报, 2013, 49 (6): 2- 11 LU Bing-heng, ZHAO Wan-hua, ZHANG Jun, et al Electromechanical coupling in the feed system with high speed and high acceleration[J]. Journal of Mechanical Engineering, 2013, 49 (6): 2- 11
doi: 10.3901/JME.2013.06.002
[3]
ERKORKMAZ K, KAMALZADEH A High bandwidth control of ball screw drives[J]. CIRP Annals-Manufacturing Technology, 2006, 55 (1): 393- 398
doi: 10.1016/S0007-8506(07)60443-0
[4]
SUN Z, PRITSCHOW G, LECHLER A Enhancement of feed drive dynamics using additional table speed feedback[J]. CIRP Annals-Manufacturing Technology, 2016, 65 (1): 357- 360
doi: 10.1016/j.cirp.2016.04.099
[5]
SUN Z, ZAHN P, VERL A, et al A new control principle to increase the bandwidth of feed drives with large inertia ratio[J]. International Journal of Advanced Manufacturing Technology, 2017, 91 (5?8): 1747- 1752
doi: 10.1007/s00170-016-9895-3
[6]
GORDON D J, ERKORKMAZ K Accurate control of ball screw drives using poleplacement vibration damping and a novel trajectory prefilter[J]. Precision Engineering, 2013, 37 (2): 308- 322
doi: 10.1016/j.precisioneng.2012.09.009
[7]
QIAN R R, LUO M Z, ZHAO J H, et al. Novel sliding mode control for ball screw servo system [C]// International Conference on Mechanical, Industrial, and Manufacturing Technologies. Cape Town: MATEC Web of Conferences, 2016, 54: 03007.
[8]
DONG L, TANG W C Adaptive backstepping sliding mode control of flexible ball screw drives with time-varying parametric uncertainties and disturbances[J]. ISA Transactions, 2014, 53 (1): 110- 116
doi: 10.1016/j.isatra.2013.08.009
[9]
UTKIN V, SHI J X. Integral sliding mode in systems operating under uncertainty conditions [C]// Proceedings of the 35th IEEE Conference on Decision and Control. Lobe: IEEE, 1996: 4591-4596.
[10]
BAO D F, TANG W C, DONG L Integral sliding mode control for flexible ball screw drives with matched and mismatched uncertainties and disturbances[J]. Journal of Central South University, 2017, 24 (9): 1992- 2000
doi: 10.1007/s11771-017-3608-4
[11]
王坤, 王建美, 王芳, 等 非匹配不确定系统的滑模控制及在电机控制中的应用[J]. 控制理论及应用, 2019, 36 (1): 143- 150 WANG Kun, WANG Jian-mei, WANG Fang, et al Sliding mode control for nonlinear system with mismatched uncertainties and application in motor control[J]. Control Theory and Applications, 2019, 36 (1): 143- 150
[12]
WANG N, LIN W Y Robust tracking control of AC servo system including a ball screw[J]. Neurocomputing, 2016, 179: 110- 117
doi: 10.1016/j.neucom.2015.11.073
[13]
LIAN J, ZHAO J Robust H∞ control of uncertain switched systems: a sliding mode control design[J]. Acta Automatica Sinica, 2009, 35 (7): 965- 970
[14]
TOKAT S, EKSIN I, GUZELKAYA M Linear time-varying sliding surface design based on co-ordinate transformation for high-order systems[J]. Transactions of the Institute of Measurement and Control, 2009, 31 (1): 51- 70
doi: 10.1177/0142331208090672
[15]
TOKAT S, EKSIN I, GUZELKAYA M A new design method for sliding mode controllers using a linear time-varying sliding surface[J]. Proceedings of the Institution of Mechanical Engineers, Part I: Journal of Systems and Control Engineering, 2002, 216 (6): 455- 466
doi: 10.1177/095965180221600602
[16]
YANG J, LI S H, YU X H Sliding mode control for systems with mismatched uncertainties via a disturbance observer[J]. IEEE Transactions on Industrial Electronics, 2013, 60 (1): 160- 169
doi: 10.1109/TIE.2012.2183841
[17]
董亮. 高速滚珠丝杠进给系统动态特性与控制技术研究[D]. 南京: 东南大学, 2015. DONG Liang. System dynamics and precision control of high speed ball screw drives [D]. Nanjing: Southeast University, 2015.
[18]
CHOI H H LMI-based sliding surface design for integral sliding mode control of mismatched uncertain systems[J]. IEEE Transactions on Automatic Control, 2007, 52 (4): 736- 742
doi: 10.1109/TAC.2007.894543
[19]
KIM K S, PARK Y, OH S H Designing robust sliding hyperplanes for parametric uncertain systems: a Riccati approach[J]. Automatica, 2000, 36 (7): 1041- 1048
doi: 10.1016/S0005-1098(00)00014-5
[20]
姜伟, 王宏力, 陆敬辉, 等 连续时间多胞线性变参数系统变增益H∞/H2输出反馈控制 [J]. 控制理论与应用, 2016, 33 (9): 1225- 1235 JIANG Wei, WANG Hong-li, LU Jing-hui, et al Gain-scheduled H∞/H2 output feedback controller synthesis for continuous-time polytopic linear parameter varying systems [J]. Control Theory and Applications, 2016, 33 (9): 1225- 1235
doi: 10.7641/CTA.2016.50768
[21]
CHEN W H, BALLANCE D J, GAWEHROP P J, et al A nonlinear disturbance observer for robotic manipulators[J]. IEEE on Industrial Electronics, 2000, 47 (4): 932- 938
doi: 10.1109/41.857974