| Mechanical Engineering |
|


|
|
|
| Modeling and property analysis of underwater vector propulsion system based on nested Z-shafts |
Lei ZHANG( ),Hai-jun XU*(),Teng-an ZOU,Xiao-jun XU,Yu-kang CHANG ),Hai-jun XU*(),Teng-an ZOU,Xiao-jun XU,Yu-kang CHANG |
| College of Intelligence, National University of Defense Technology, Changsha 410073, China |
|
|
|
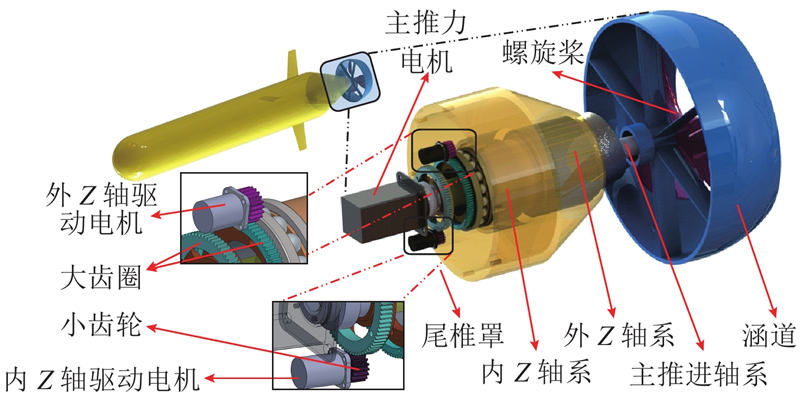
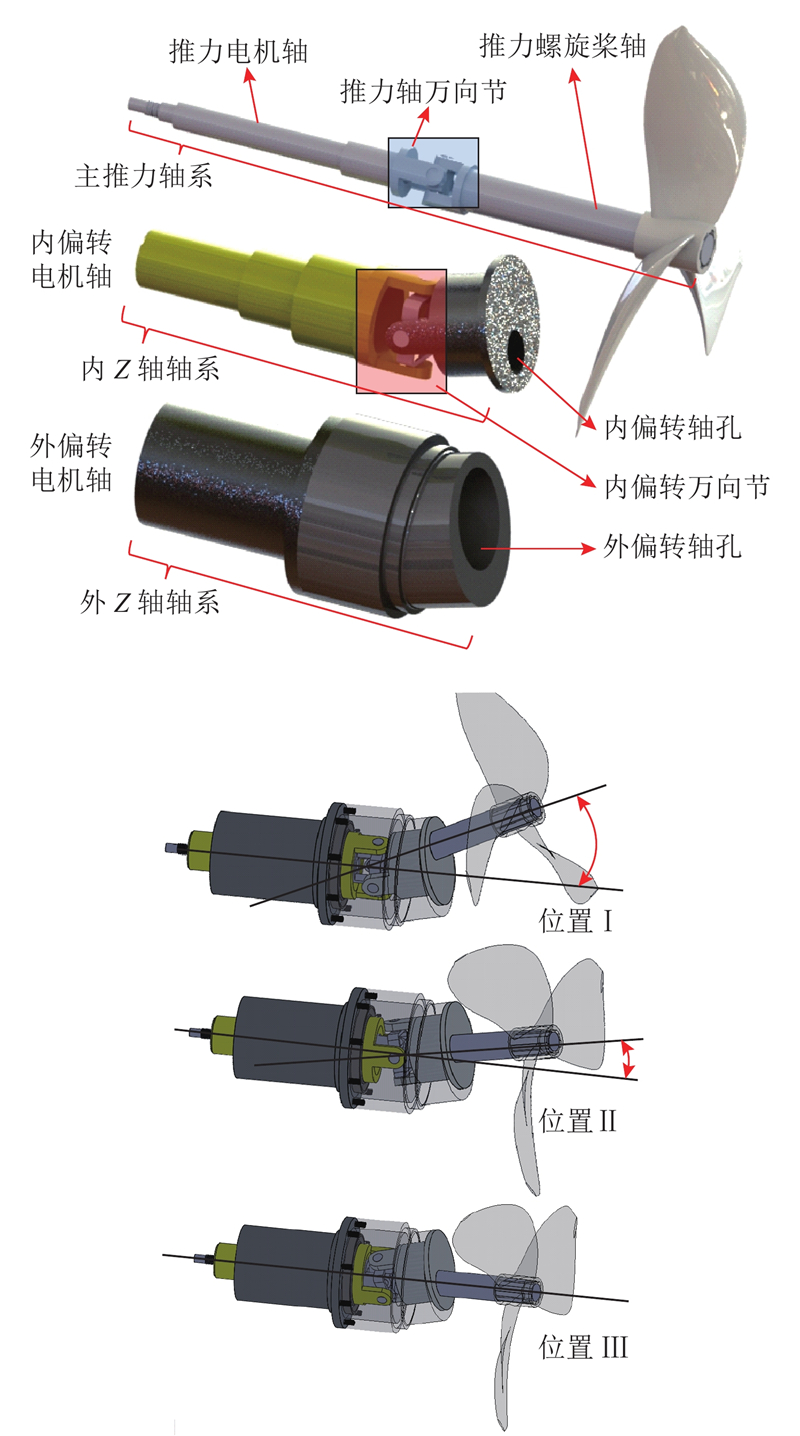
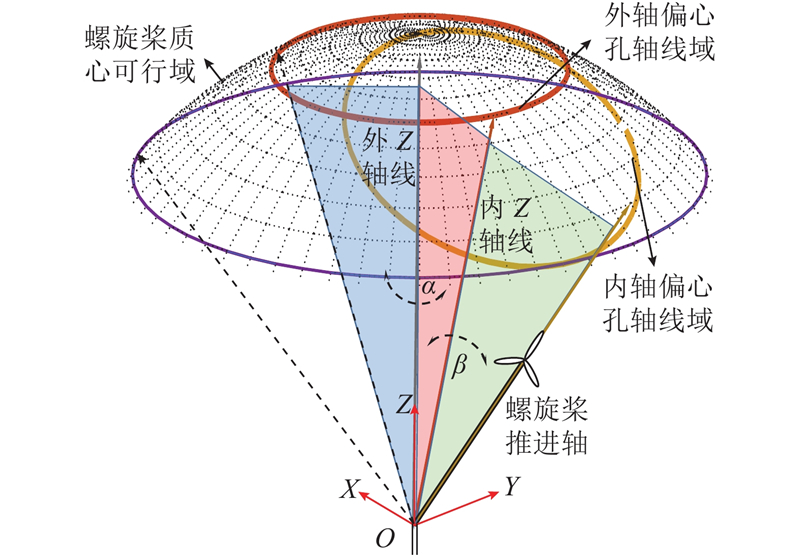
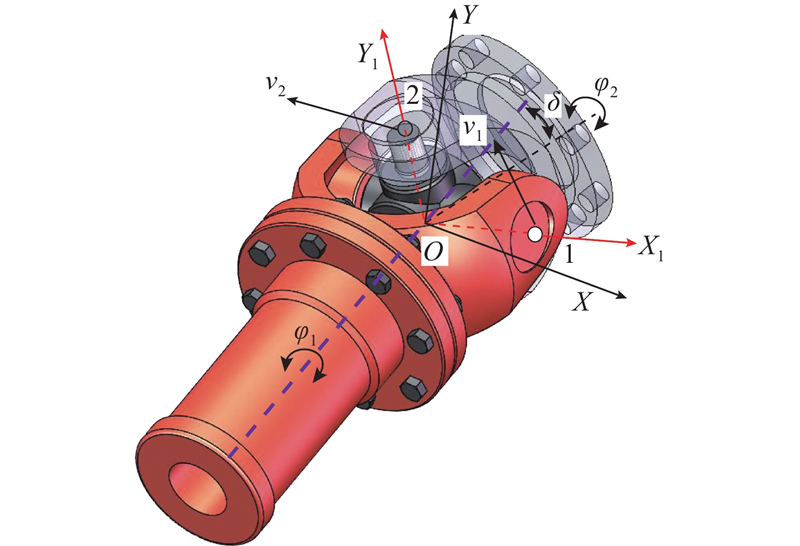
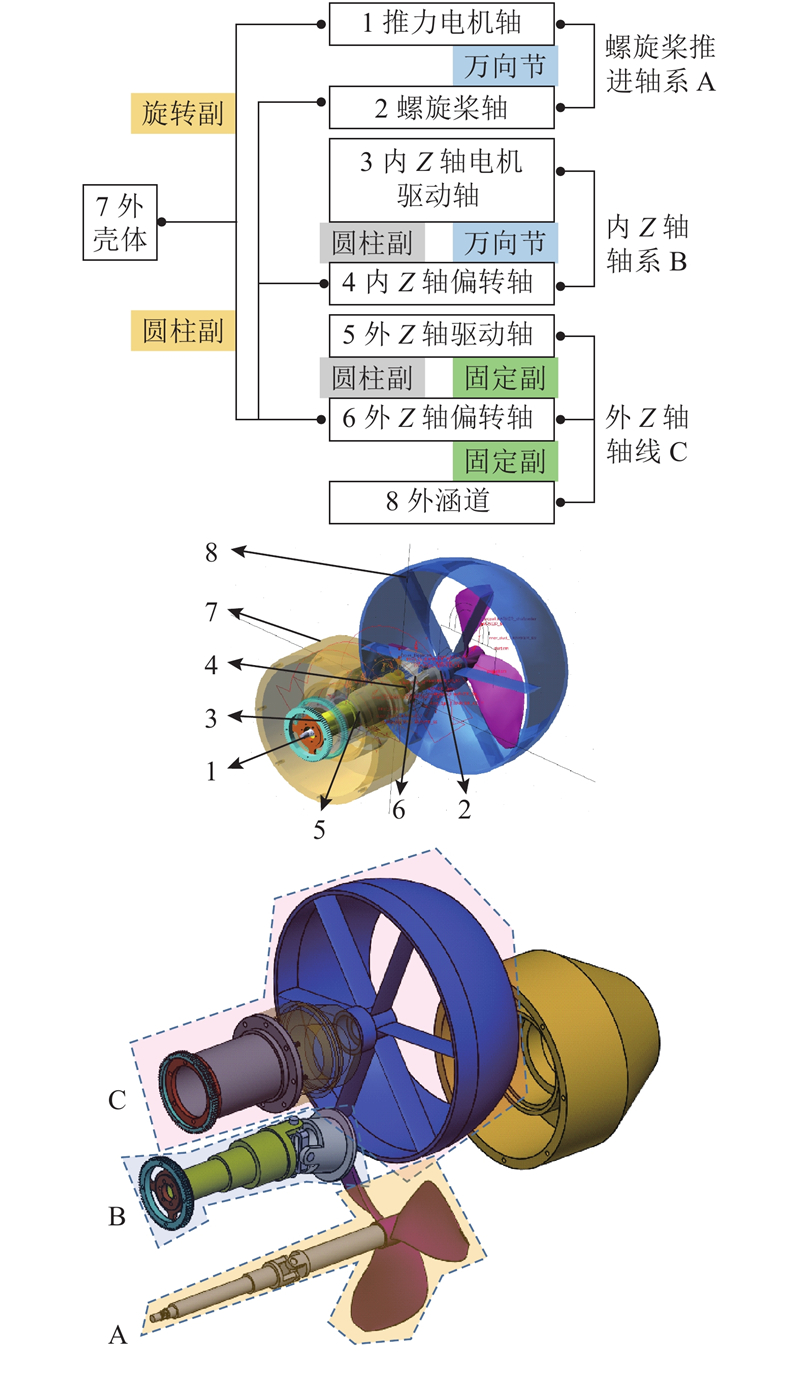
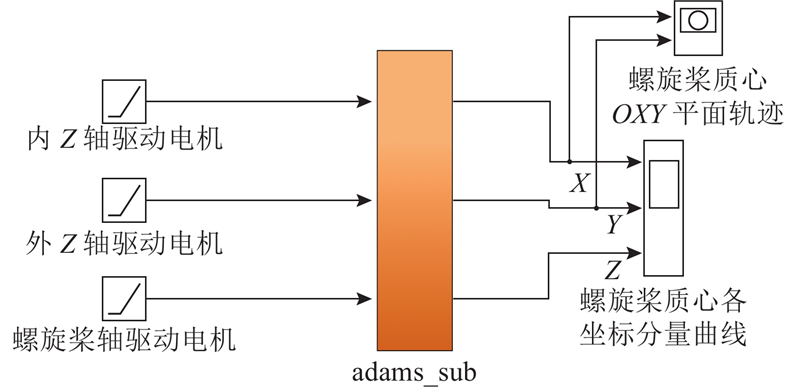
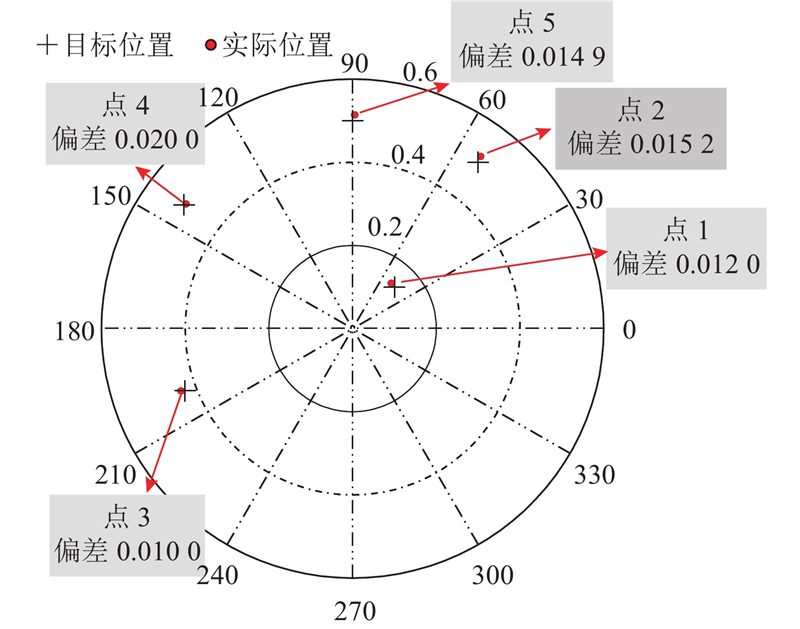
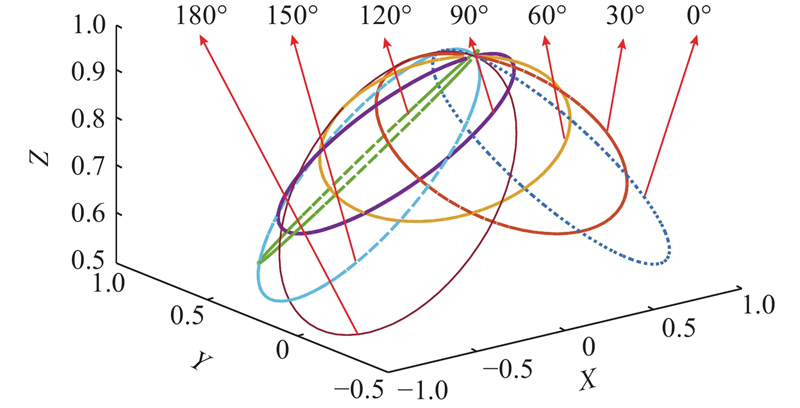
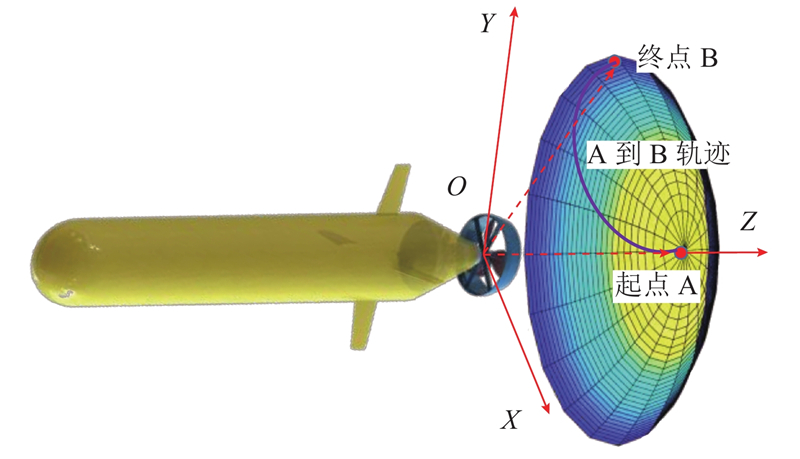
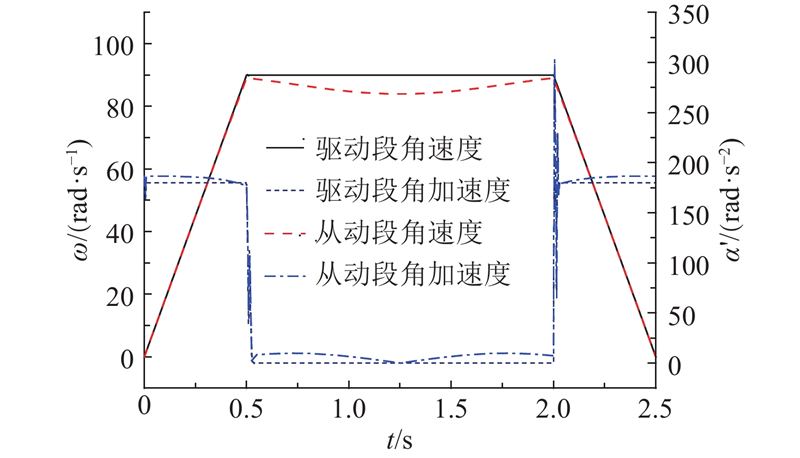
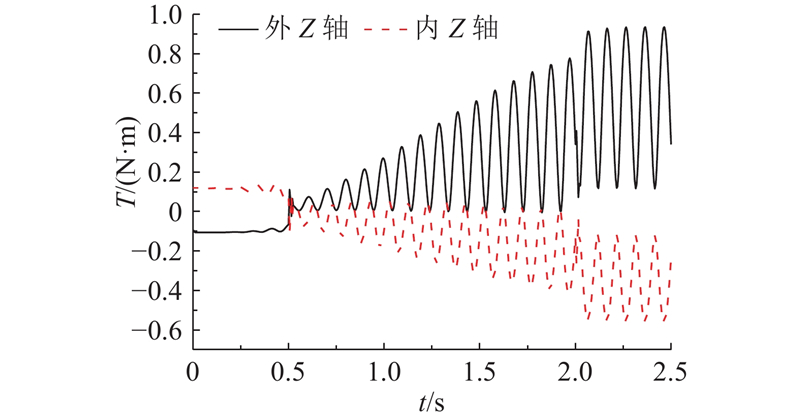
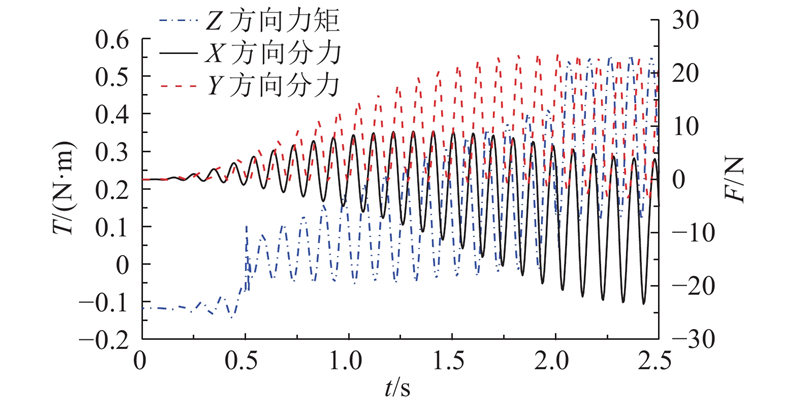
Abstract An inner and outer nested Z-shafts mechanism was proposed to realize the vector propulsion of propeller, in order to increase the water tightness and bearing capacity of vector propulsion system. Kinematic model of vectored thrusting system was established to achieve relationship between deflection of vectored shaft and angular displacement of inner and outer Z-shafts. The inverse solution formula of deflection angle for driving motors was derived; a simulation model combining Simulink and ADAMS was established. The inverse solution results were substituted into the model to simulate the deflection process of vectored shaft. The simulated curve and theoretical results were compared to verify the correctness of the model. The mechanical properties of kinematic pairs during deflection process of vectored thrusting system were studied. Results show that the deflection angle of vectored shaft by the simulation model based on inverse solution fits well with the given values. The torque applied on driving motors of inner and outer Z-shafts varies cyclically during the deflection process of vectored shaft, while the amplitude increases gradually with the increase of the deflection angle.
|
|
Received: 22 January 2019
Published: 05 March 2020
|
|
|
|
Corresponding Authors:
Hai-jun XU
E-mail: cvx1987@163.com;xuhaijun_1999@163.com
|
嵌套Z轴式水下矢量推进系统建模与特性分析
为提高矢量推进系统的水密性和承载能力,提出一种内、外嵌套Z轴机构,实现螺旋桨的矢量推进. 建立矢量推进系统运动学模型,获得矢量轴偏转角与内、外Z轴转角的关系. 推导驱动电机偏转角反解公式,搭建Simulink与ADAMS联合仿真模型. 将反解结果代入仿真模型,仿真矢量轴偏转过程. 通过对比仿真曲线与理论分析结果,检验模型的正确性. 分析矢量推进系统偏转过程中运动副的力学特性,结果表明:基于反解数据仿真得到的矢量轴偏转角与给定结果吻合程度较高,在矢量轴偏转过程中,内、外Z轴偏转电机上的驱动力矩呈周期性变化,且幅值随着偏转角度的增大而逐渐增大.
关键词:
嵌套Z轴,
矢量推进,
潜航器,
联合仿真,
力学特性
|
|
| [1] |
曹秋生 “蓝鳍金枪鱼-21”自主水下潜航器技术特点分析[J]. 电光系统, 2014, 6 (2): 1- 6
CAO Qiu-sheng Technology characteristics of unmaned under water vehicle[J]. Electronic and Electroptical Systems, 2014, 6 (2): 1- 6
|
|
|
| [2] |
钱东, 唐献平, 赵江 UUV技术发展与系统设计综述[J]. 鱼雷技术, 2014, 22 (6): 401- 414
QIAN Dong, TANG Xian-ping, ZHAO Jiang Overview of technology development and system of UUVs[J]. Torpedo Technology, 2014, 22 (6): 401- 414
doi: 10.3969/j.issn.1673-1948.2014.06.001
|
|
|
| [3] |
谢源, 谭力 矢量推进混合型水下运载器的概念设计研究[J]. 船舶工程, 2015, 37 (8): 107- 110
XIE Yuan, TAN Li Conceptual design of a new hybrid vectored thruster autonomous underwater vehicle[J]. Ship Engineering, 2015, 37 (8): 107- 110
|
|
|
| [4] |
汪军, 杨俊 水下矢量推进器系统的设计与分析[J]. 长沙大学学报, 2013, 27 (9): 24- 27
WANG Jun, YANG Jun Design and analysis of underwater vectored thruster in underwater vehicle[J]. Journal of Changsha Univertsity, 2013, 27 (9): 24- 27
|
|
|
| [5] |
方世鹏. 水下矢量推进螺旋桨装置设计与研究[D]. 长沙: 国防科技大学, 2008: 5-12.
FANG Shi-peng. Research on submarine truster-vectoring propulsion device [D]. Changsha: National University of Defense Technology, 2008: 5-12.
|
|
|
| [6] |
张帅, 肖晶晶 水下矢量推进器研究综述[J]. 舰船科学技术, 2019, 41 (7): 1- 5
ZHANG Shuai, XIAO Jing-jing Review of underwater vector propulsion devices[J]. Ship Science and Technology, 2019, 41 (7): 1- 5
doi: 10.3404/j.issn.1672-7649.2019.07.001
|
|
|
| [7] |
徐瀚. 水下机器人矢量推进机构的构型综合与动力学建模[D]. 济南: 山东大学, 2017: 14-16.
XU Han. Configuration synthesis and dynamic modeling of spherical parallel vector thruster for underwater robot [D]. Jinan: Shandong University, 2017: 14-16.
|
|
|
| [8] |
常欣. 潜器全方向推进器的研究[D]. 哈尔滨: 哈尔滨工程大学, 2005: 7–10.
CHANG Xin. Research on the variable vector propeller of submersible[D]. Harbin: Harbin Engineering University, 2005: 7–10.
|
|
|
| [9] |
冯永军. 全方向推进器的水动力性能计算与试验设计研究[D]. 哈尔滨: 哈尔滨工程大学, 2002: 12–13.
FENG Yong-jun. Study on the hydrodynamic characteristics and experimental design of variable vector propeller [D]. Harbin: Harbin Engineering University, 2002: 12–13.
|
|
|
| [10] |
刘曙光. 矢量推进水下潜航器系统辨识建模与动力学特性仿真分析[D]. 天津: 天津大学, 2018: 9-16.
LIU Shu-guang. System identification modeling and dynamic characteristics simulation analysis of vectored thruster underwater vehicle [D]. Tianjin: Tianjin University, 2018: 9-16.
|
|
|
| [11] |
罗庆生, 刘星栋, 弓瑞, 等 矢量喷水推进式水下机器人的建模仿真与验证[J]. 应用科技, 2017, 44 (2): 7- 14
LUO Qingsheng, LIU Xingdong, GONG Rui, et al Simulation and experimental validation of an autonomous underwater vehicle equipped with multi-vectored thrusters[J]. Applied science and technology, 2017, 44 (2): 7- 14
|
|
|
| [12] |
耿令波, 胡志强, 林扬, 等 基于横向二次射流的水下推力矢量方法[J]. 航空动力学报, 2017, 32 (8): 1922- 1932
GEN Ling-bo, HU Zhi-qiang, LIN Yang, et al Underwater thrust vectoring method based on cross second flow[J]. Journal of Aerospace Power, 2017, 32 (8): 1922- 1932
|
|
|
| [13] |
李新飞, 马强, 袁利毫, 等 矢量推进水下机器人的推力分配方法[J]. 哈尔滨工程大学学报, 2018, 39 (10): 1605- 1611
LI Xin-fei, MA Qiang, YUAN Li-hao, et al Dynamic modeling and experimental research of all deflected propeller vector propulsion device for underwater vehicle[J]. Journal of Harbin Engineering University, 2018, 39 (10): 1605- 1611
|
|
|
| [14] |
刘友, 沈清, 马东立, 等 水下滑翔机的机翼位置与螺旋运动关系分析[J]. 浙江大学学报: 工学版, 2017, 51 (9): 1760- 1769
LIU You, SHEN Qing, MA Dong-li, et al Relationship Of wing location and helical motion for underwater glider[J]. Journal of Zhejiang University: Engineering Science, 2017, 51 (9): 1760- 1769
|
|
|
| [15] |
逯玉明. 水下探测机器人设计与定位导航方法研究[D]. 扬州: 扬州大学, 2017: 12-21.
LU Yu-ming. Design of underwater exploration robot and research on positioning navigation method [D]. Yangzhou: Yangzhou University, 2017: 12-21.
|
|
|
| [16] |
赵兴宇. 矢量推进水下机器人的运动控制系统设计[D]. 济南: 山东大学, 2017: 12-15.
ZHAO Xin-yu. Configuration synthesis and dynamic modeling of spherical parallel vector thruster for underwater robot [D]. Jinan: Shandong University, 2017: 12-15.
|
|
|
| [17] |
贾晓红, 金德闻, 张济川 考虑时间变量时单十字万向节的运动学研究[J]. 机械, 1999, 26 (5): 13- 14
JIA Xiao-hong, JING De-wen, ZHANG Ji-chuan Kinetical analysis of a single universal joint[J]. Machine, 1999, 26 (5): 13- 14
doi: 10.3969/j.issn.1002-2333.1999.05.008
|
|
|
| [18] |
毛斌峰, 陈公昌 多桨船拖桨阻力预报[J]. 广东造船, 2016, 35 (3): 23- 25
MAO Bin-feng, CHEN Gong-chang Additional drag method of multi-propeller ship in abnormal working condition[J]. Guangdong Shipbuilding, 2016, 35 (3): 23- 25
doi: 10.3969/j.issn.2095-6622.2016.03.006
|
|
|
| [19] |
翟龙迎. 水下机器人全部偏转螺旋桨矢量推进装置的动力学建模与实验研究[D]. 济南: 山东大学, 2018: 12-21.
ZHAI Long-yin. Dynamic modeling and experimental research of all deflected propeller vector propulsion device for underwater vehicle[D]. Jinan: Shandong University, 2018: 12-21.
|
|
|
| [20] |
周广礼, 董文才, 欧勇鹏, 等 多桨船螺旋桨组合工况对舵水动力及回转性能的影响[J]. 海军工程大学学报, 2017, 29 (1): 29- 34
ZHOU Guang-li, DONG Wen-cai, OU Yong-peng, et al Study on rudders hydrodynamic performance and turning ability under different propeller combination modes for ships with multi-propeller[J]. Journal of Naval University of Engineering, 2017, 29 (1): 29- 34
|
|
|
| [21] |
潘存云,郭克希 水下矢量推进器的动力学分析[J]. 机械设计与研究, 2010, 26 (6): 20- 23
PAN Cun-yun, GUO Ke-xi Dynamics analysis and research of vectored thruster with propeller under the deep sear[J]. Machine Design and Research, 2010, 26 (6): 20- 23
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|