| 机器人与机构设计 |
|


|
|
|
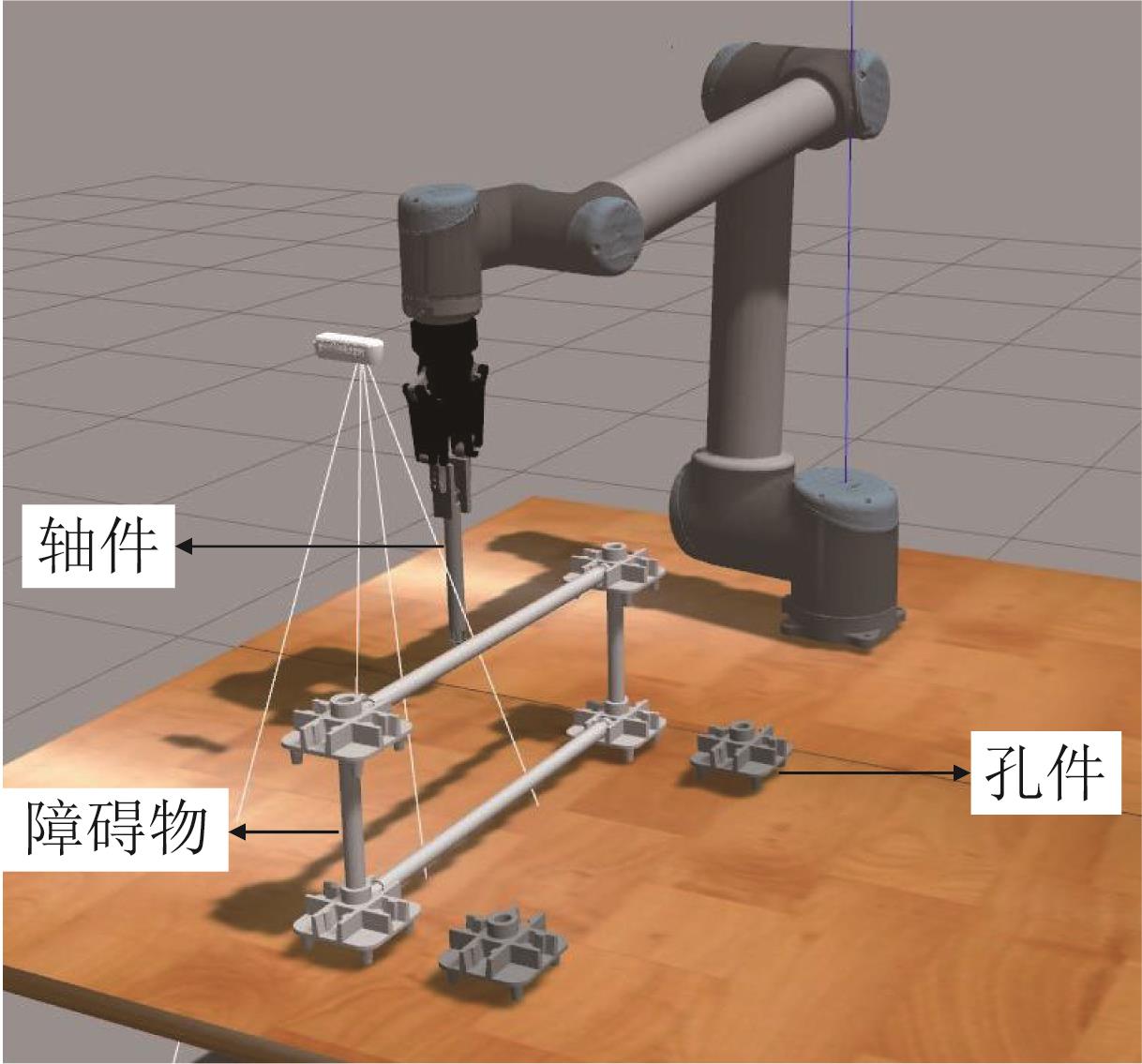
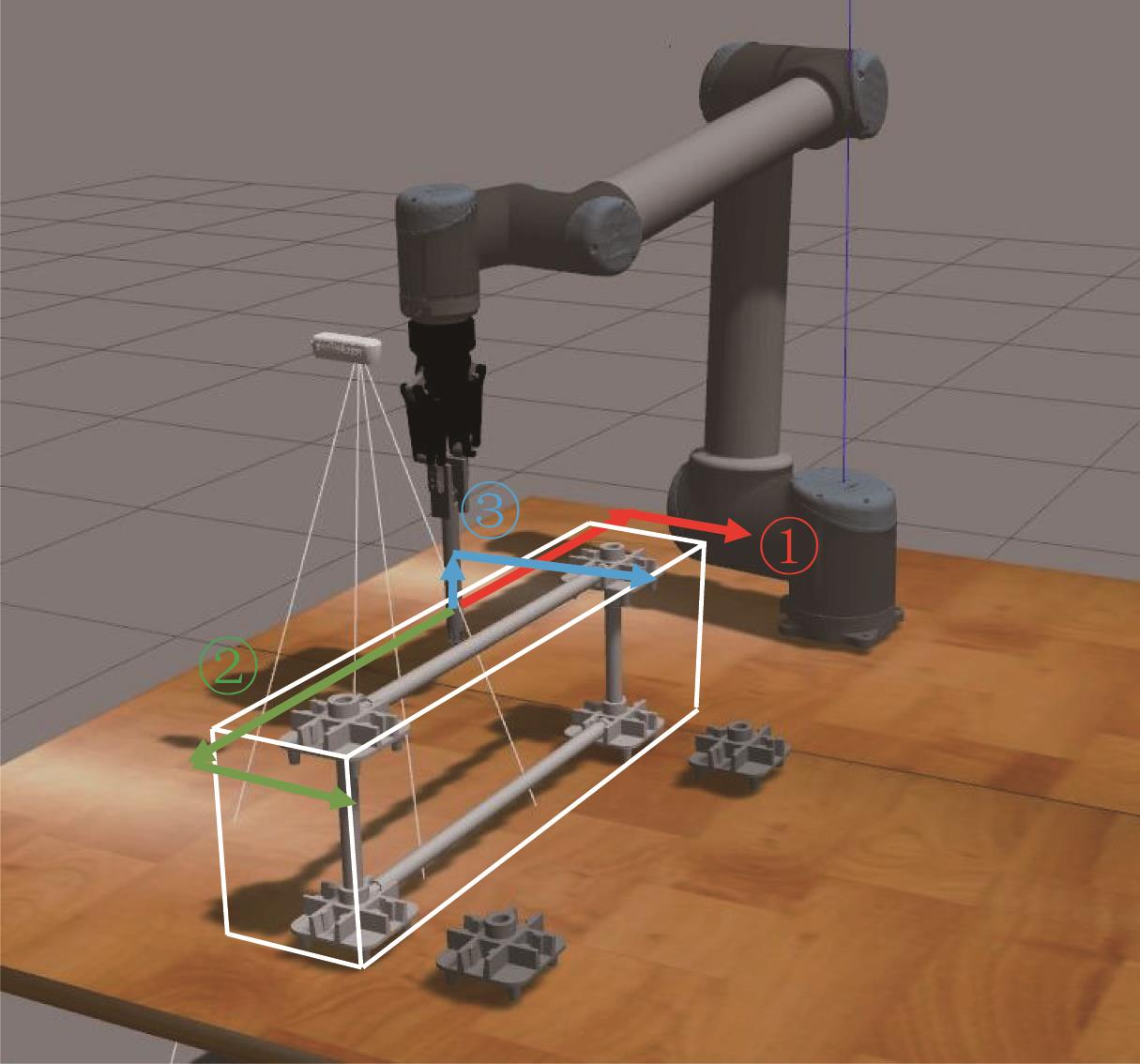
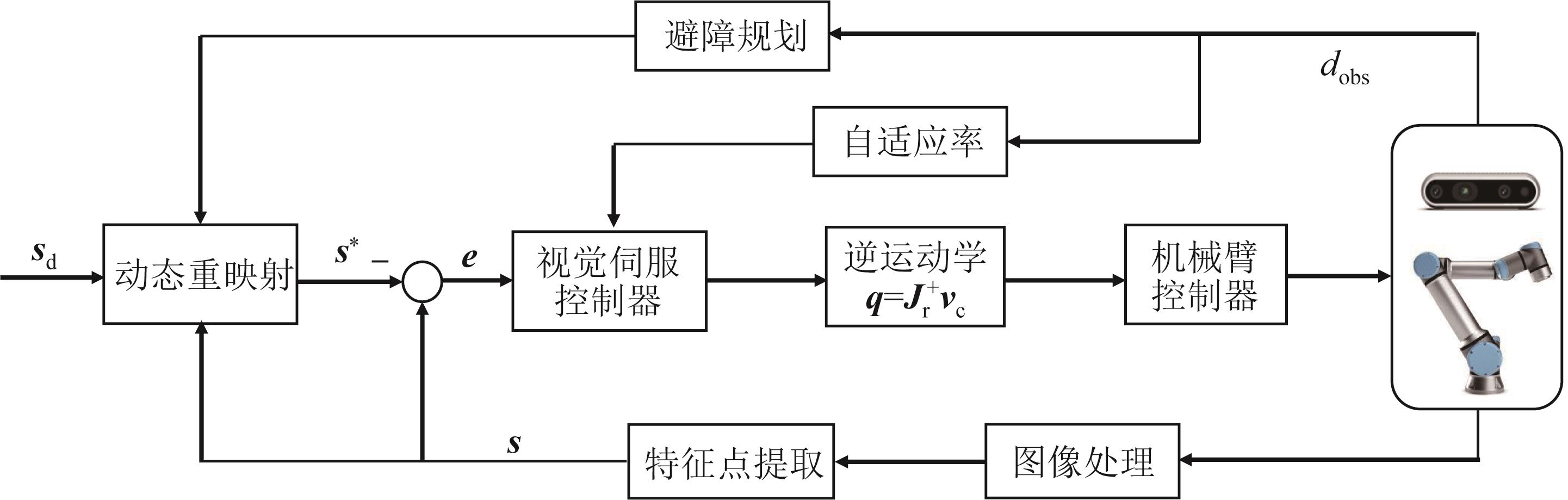
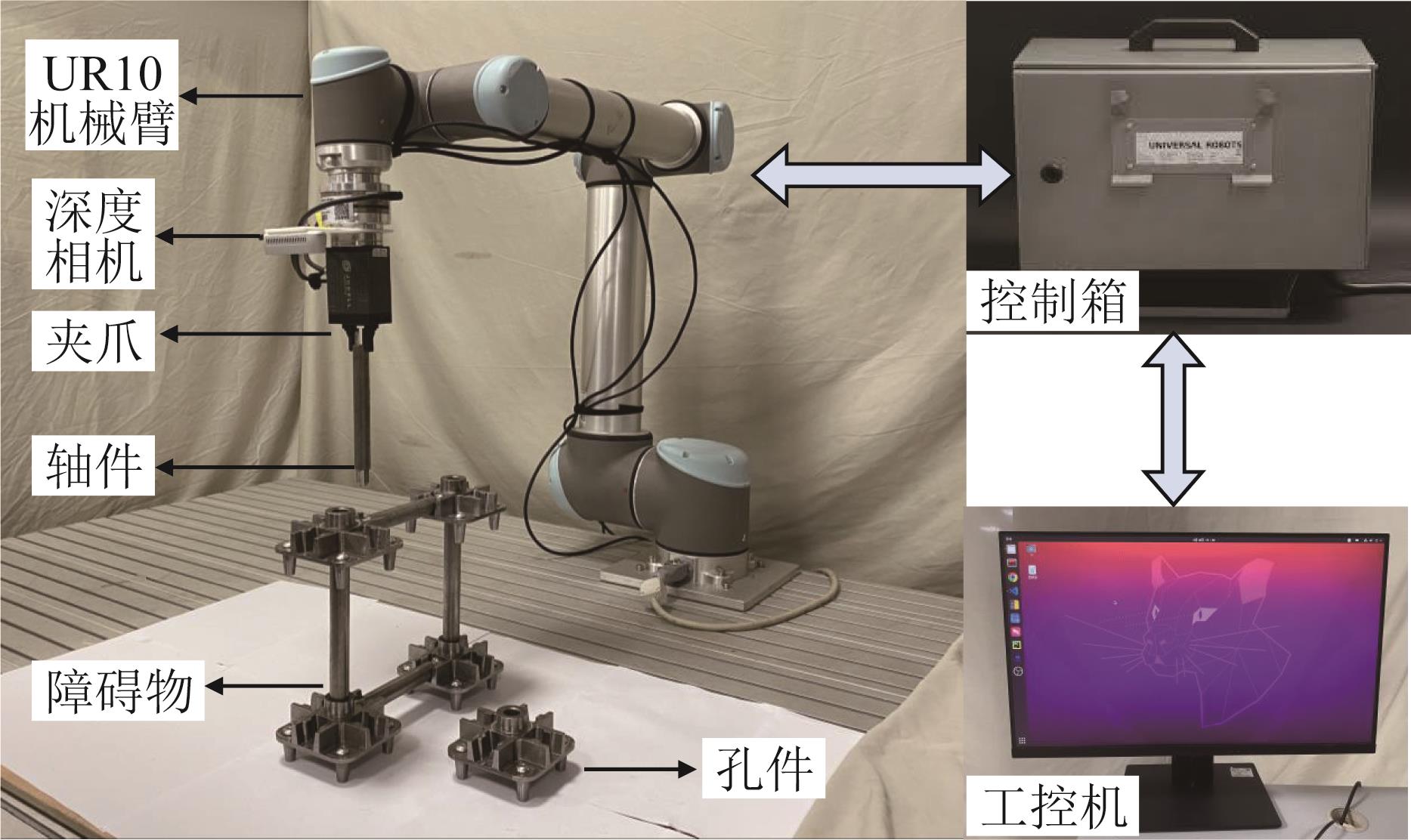
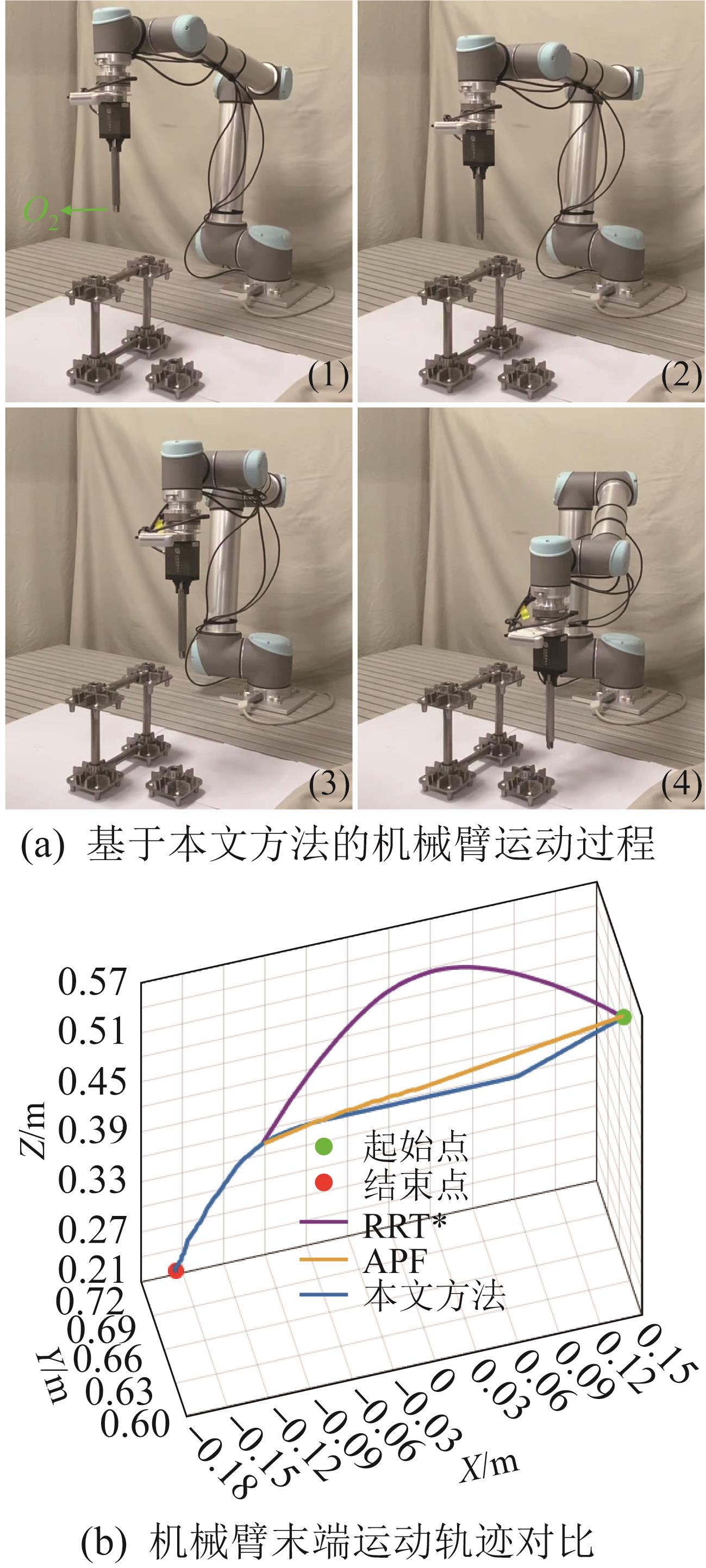
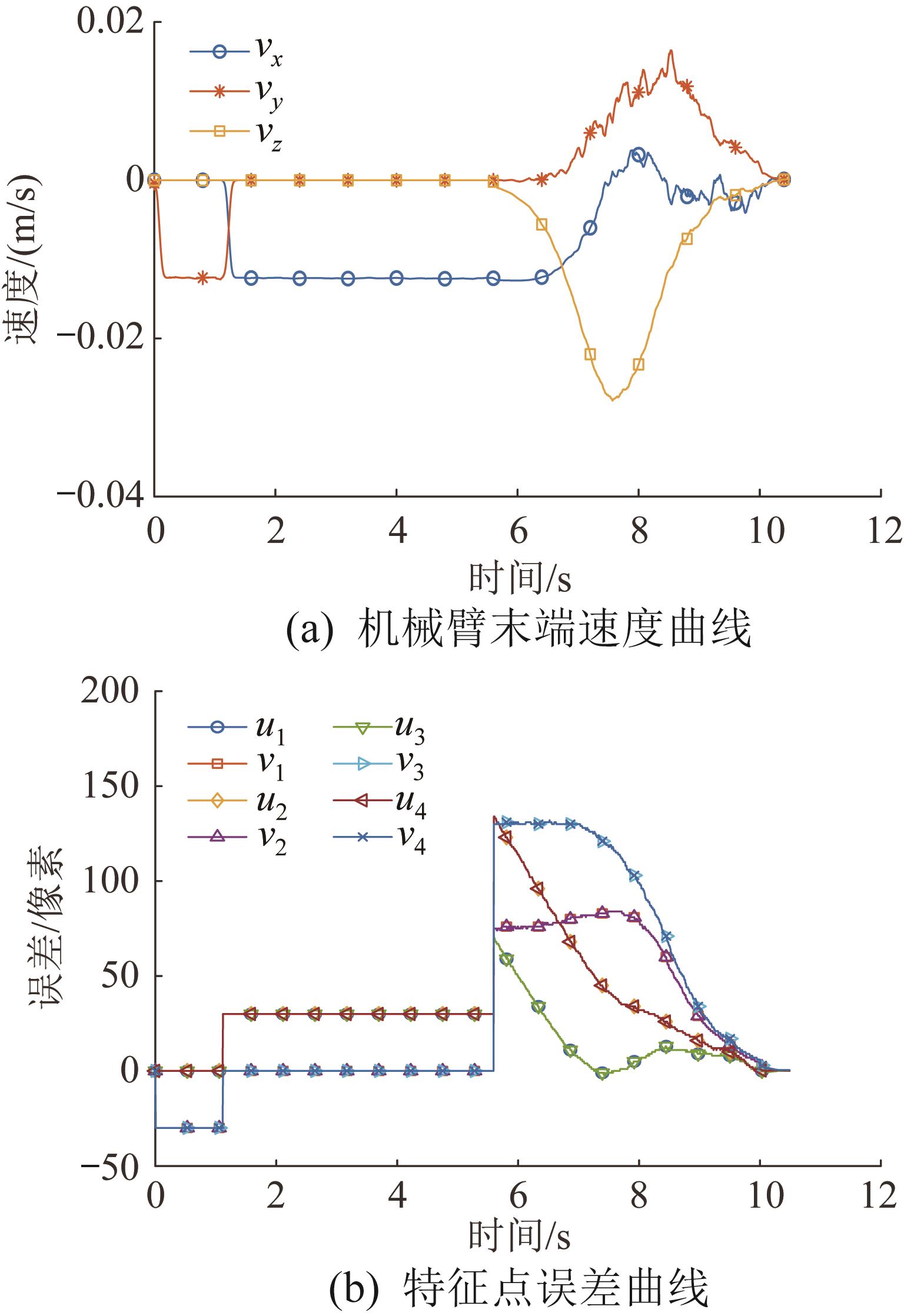
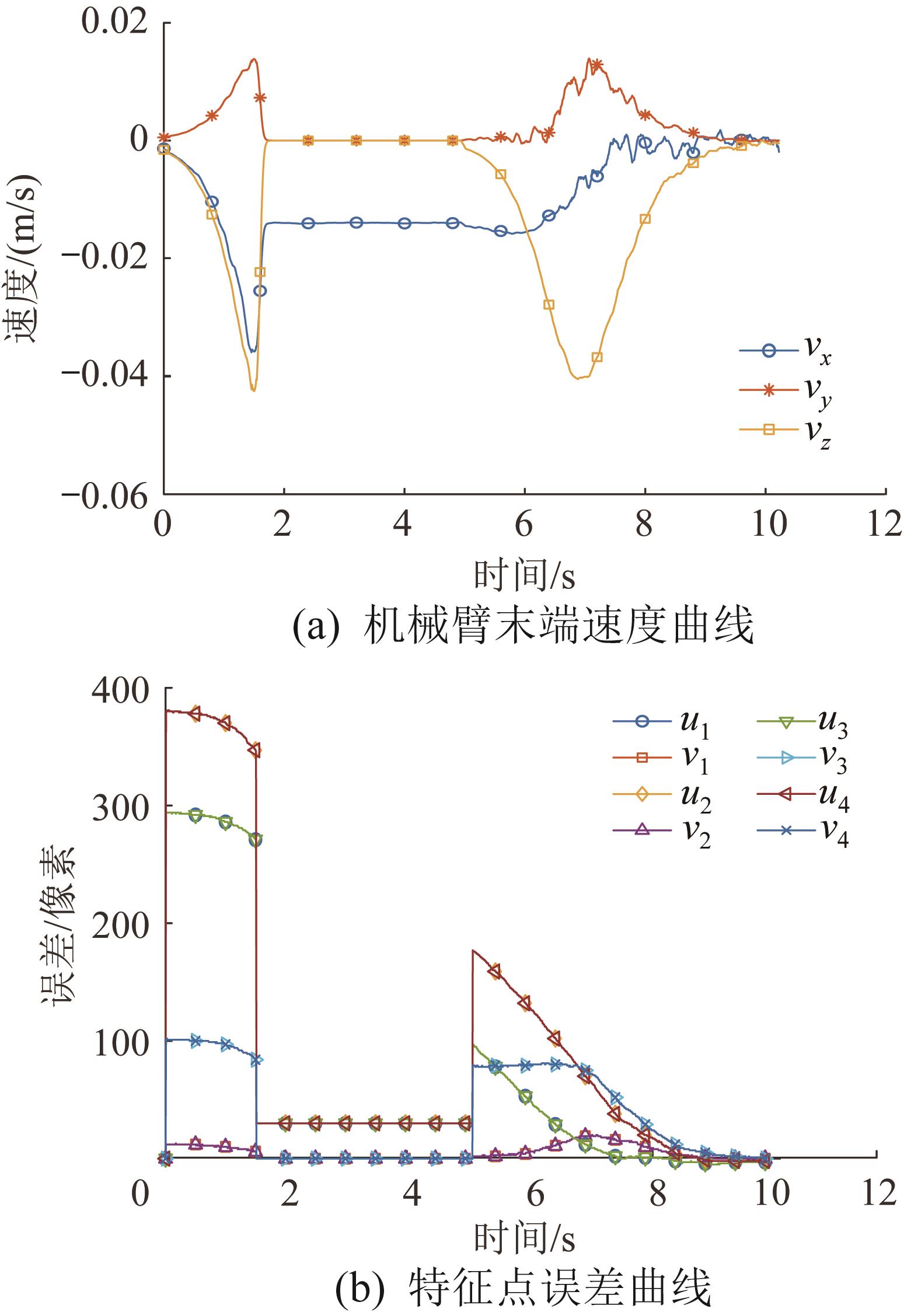
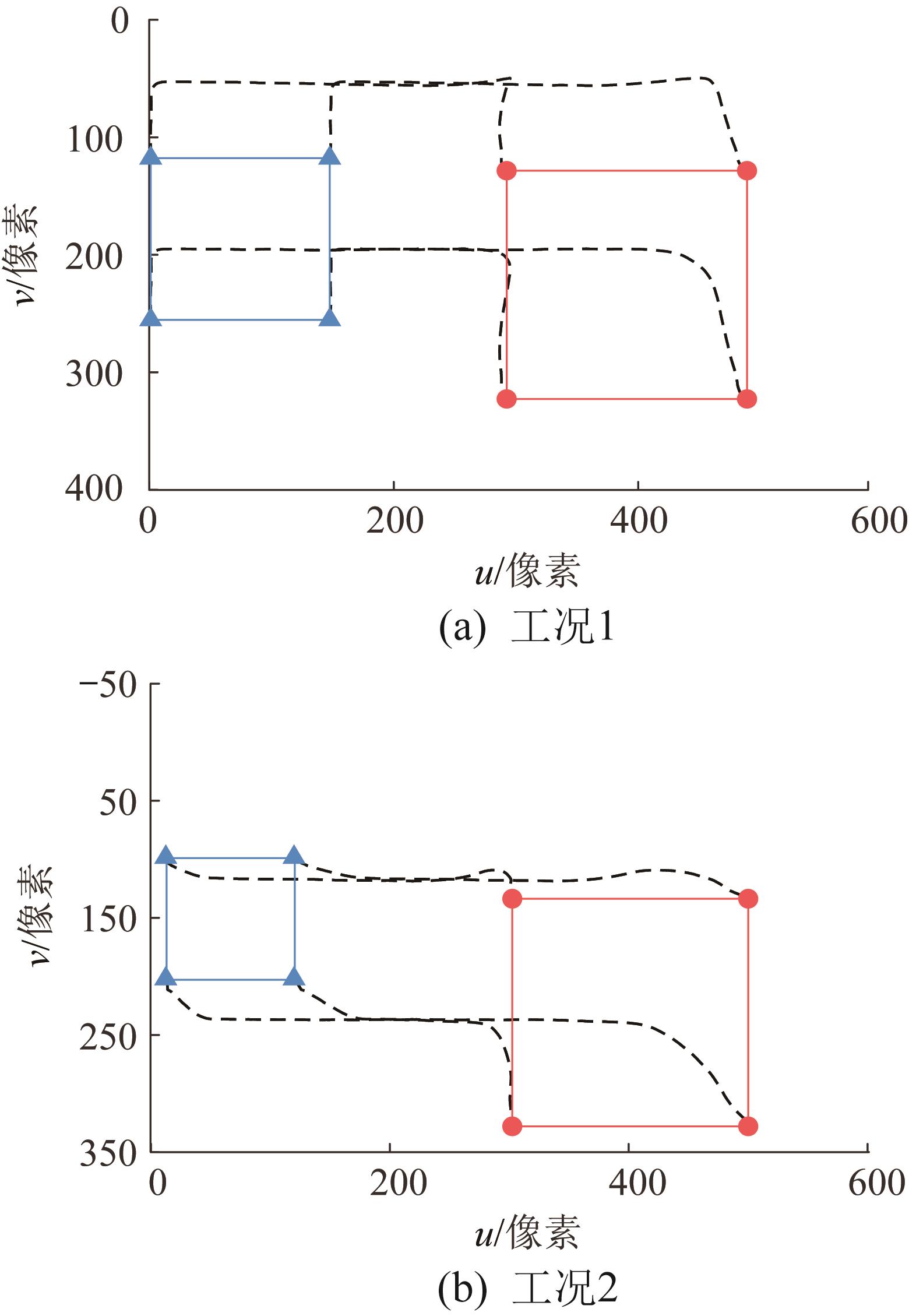
| 基于特征点动态重映射的机械臂视觉伺服实时避障方法 |
刘俊1( ),朱姿娜1(),潘雪云1,孙晓燕2 ),朱姿娜1(),潘雪云1,孙晓燕2 |
1.上海工程技术大学 机械与汽车工程学院,上海 201620
2.浙江大学 建筑工程学院,浙江 杭州 310058 |
|
| Real-time obstacle avoidance method via dynamic feature point remapping for robotic arm visual servoing |
| Jun LIU1(),Zina ZHU1(),Xueyun PAN1,Xiaoyan SUN2 |
1.School of Mechanical and Automotive Engineering, Shanghai University of Engineering Science, Shanghai 201620, China
2.College of Civil Engineering and Architecture, Zhejiang University, Hangzhou 310058, China |
引用本文:
刘俊,朱姿娜,潘雪云,孙晓燕. 基于特征点动态重映射的机械臂视觉伺服实时避障方法[J]. 工程设计学报, 2026, 33(1): 76-85.
Jun LIU,Zina ZHU,Xueyun PAN,Xiaoyan SUN. Real-time obstacle avoidance method via dynamic feature point remapping for robotic arm visual servoing[J]. Chinese Journal of Engineering Design, 2026, 33(1): 76-85.
链接本文:
https://www.zjujournals.com/gcsjxb/CN/10.3785/j.issn.1006-754X.2026.05.154
或
https://www.zjujournals.com/gcsjxb/CN/Y2026/V33/I1/76
|
| [1] |
陈雨, 张晋轩. 曲线拟合的机械臂避障轨迹规划及仿真分析[J]. 组合机床与自动化加工技术, 2021(9): 162-164.
CHEN Y, ZHANG J X. Trajectory planning and simulation analysis of robot arm obstacle avoidance based on curve fitting[J]. Modular Machine Tool & Automatic Manufacturing Technique, 2021(9): 162-164.
|
| [2] |
柴天佑. 工业过程控制系统研究现状与发展方向[J]. 中国科学: 信息科学, 2016, 46(8): 1003-1015. doi:10.1360/n112016-00062
CHAI T Y. Industrial process control systems: research status and development direction[J]. Scientia Sinica (Informationis), 2016, 46(8): 1003-1015.
doi: 10.1360/n112016-00062
|
| [3] |
王耀南, 江一鸣, 姜娇, 等. 机器人感知与控制关键技术及其智能制造应用[J]. 自动化学报, 2023, 49(3): 494-513.
WANG Y N, JIANG Y M, JIANG J, et al. Key technologies of robot perception and control and its intelligent manufacturing applications[J]. Acta Automatica Sinica, 2023, 49(3): 494-513.
|
| [4] |
李玲, 侯玉龙, 李瑶, 等. 基于改进麻雀搜索算法的机械臂多目标轨迹优化方法[J]. 工程设计学报, 2025, 32(5): 664-674.
LI L, HOU Y L, LI Y, et al. Multi-objective trajectory optimization method for manipulator based on improved sparrow search algorithm[J]. Chinese Journal of Engineering Design, 2025, 32(5): 664-674.
|
| [5] |
袁庆霓, 齐建友, 虞宏建. 基于深度强化学习的机械臂视觉伺服智能控制[J]. 计算机集成制造系统, 2025, 31(3): 998-1013.
YUAN Q N, QI J Y, YU H J. Visual servo intelligent control method for robot arms based on deep reinforcement learning[J]. Computer Integrated Manufacturing Systems, 2025, 31(3): 998-1013.
|
| [6] |
HUTCHINSON S, HAGER G D, CORKE P I. A tutorial on visual servo control[J]. IEEE Transactions on Robotics and Automation, 1996, 12(5): 651-670.
|
| [7] |
焦建军, 李宗刚, 李龙雄, 等. 无标定视觉伺服多轴孔装配定位方法研究[J]. 中南大学学报(自然科学版), 2024, 55(10): 3731-3741.
JIAO J J, LI Z G, LI L X, et al. Research on positioning method of uncalibrated visual servo multiple peg-in-hole assembly[J]. Journal of Central South University (Science and Technology), 2024, 55(10): 3731-3741.
|
| [8] |
牟雪琪, 于海生, 张鹏鑫, 等. 基于灰狼优化的机器人视觉伺服协同控制[J]. 组合机床与自动化加工技术, 2025(2): 120-125, 130.
MOU X Q, YU H S, ZHANG P X, et al. Robotic visual servo cooperative control based on grey wolf optimizer[J]. Modular Machine Tool & Automatic Manufacturing Technique, 2025(2): 120-125, 130.
|
| [9] |
冯垚, 周志峰, 沈亦纯, 等. 基于改进RRT算法的避障路径规划[J]. 工程设计学报, 2023, 30(6): 707-716.
FENG Y, ZHOU Z F, SHEN Y C, et al. Obstacle avoidance path planning based on improved RRT algorithm[J]. Chinese Journal of Engineering Design, 2023, 30(6): 707-716.
|
| [10] |
李宸, 史春景, 李金泉. 复合机器人路径规划研究[J]. 工程设计学报, 2025, 32(5): 623-633.
LI C, SHI C J, LI J Q. Research on path planning for composite robot[J]. Chinese Journal of Engineering Design, 2025, 32(5): 623-633.
|
| [11] |
LAVALLE S M. Rapidly-exploring random trees: a new tool for path planning[R]. Ames, Iowa: Iowa State University, 1998.
|
| [12] |
GARCÍA E, VILLAR J R, TAN Q, et al. An efficient multi-robot path planning solution using A* and coevolutionary algorithms[J]. Integrated Computer-Aided Engineering, 2023, 30(1): 41-52.
|
| [13] |
KHATIB O. Real-time obstacle avoidance for manipulators and mobile robots[J]. International Journal of Robotics Research, 1986, 5(1): 90-98.
|
| [14] |
赵红专, 张鑫, 张蓓聆, 等. 基于改进人工势场的智能车动态安全椭圆路径规划方法[J]. 山东大学学报(工学版), 2025, 55(3): 46-57.
ZHAO H Z, ZHANG X, ZHANG B L, et al. A dynamic safe elliptical path planning method for intelligent vehicles based on improved artificial potential field[J]. Journal of Shandong University (Engineering Science), 2025, 55(3): 46-57.
|
| [15] |
ZHAI D H, XIA Z Q, WU H C, et al. A motion planning method for robots based on DMPs and modified obstacle-avoiding algorithm[J]. IEEE Transactions on Automation Science and Engineering, 2023, 20(4): 2678-2688.
|
| [16] |
刘暾东, 林晨滢, 吴晓敏. 基于人工势场法的机械臂动态运动基元局部平滑避障方法[J/OL]. 控制理论与应用,2025: 1-9. (2025-03-12) [2025-06-24]. .
LIU D D, LIN C Y, WU X M. Local smooth obstacle avoidance method for dynamic motion primitives of manipulators based on artificial potential field[J/OL]. Control Theory & Applications, 2025: 1-9. (2025-03-12) [2025-06-24]. .
|
| [17] |
FLANDIN G, CHAUMETTE F, MARCHAND E. Eye-in-hand/eye-to-hand cooperation for visual servoing[C]//Proceedings of the 2000 IEEE International Conference on Robotics and Automation. San Francisco, CA, Apr. 24-28, 2002.
|
| [18] |
BÍRÓ P, KOVÁCS B B H, NOVÁK T, et al. Cluster parameter-based DBSCAN maps for image characterization[J]. Computational and Structural Biotechnology Journal, 2025, 27: 920-927.
|
| [19] |
纳文, 张世强, 曹越琦, 等. 雅可比矩阵在机器人运动中的应用[J]. 北京理工大学学报, 2020, 40(5): 576-580.
AUNG N W, ZHANG S Q, CAO Y Q, et al. Applications of Jacobi matrices in kinematics of robots[J]. Transactions of Beijing Institute of Technology, 2020, 40(5): 576-580.
|
| [20] |
SOHAN M, SAI RAM T, RAMI REDDY C V. A review on YOLOv8 and its advancements[C]//Data Intelligence and Cognitive Informatics. Singapore: Springer, 2024: 529-545.
|
| [21] |
刘远贺, 黎克波, 朱云冲, 等. 基于误差动力学的全局非线性精确飞行时间控制制导律设计[J]. 中国科学: 技术科学, 2023, 53(4): 565-575. doi:10.1360/sst-2022-0072
LIU Y H, LI K B, ZHU Y C, et al. Global nonlinear exact impact time control guidance design based on error dynamics[J]. Scientia Sinica (Technologica), 2023, 53(4): 565-575.
doi: 10.1360/sst-2022-0072
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|