| 优化设计 |
|


|
|
|
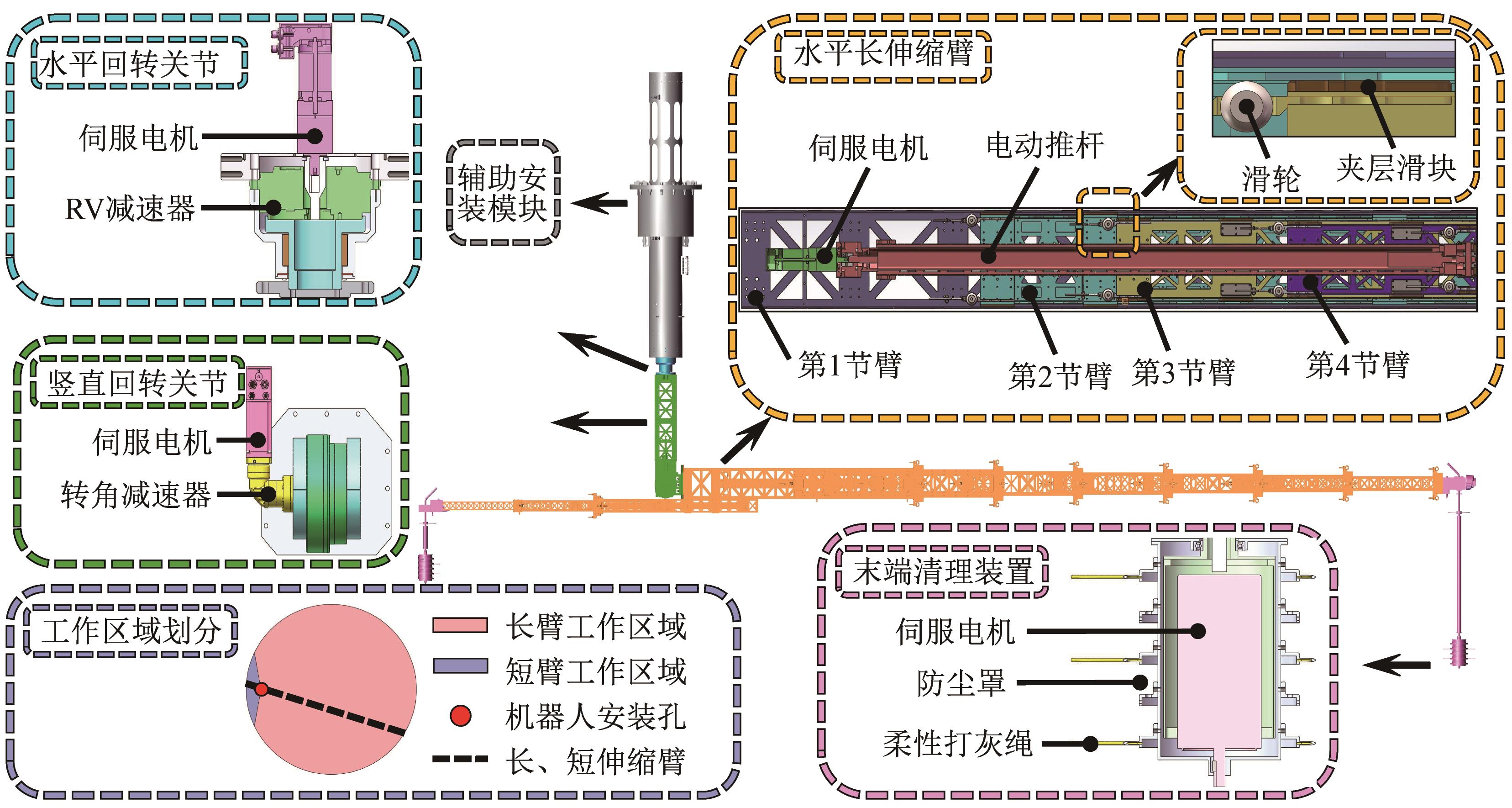
| 面向灰库清理的超大伸缩比机械臂结构设计与刚度优化 |
张嘉宁( ),张明路,李满宏(),张坦 ),张明路,李满宏(),张坦 |
| 河北工业大学 机械工程学院, 天津 300401 |
|
| Structural design and stiffness optimization of mechanical arm with super large telescopic ratio for ash silo cleaning |
| Jia-ning ZHANG(),Ming-lu ZHANG,Man-hong LI(),Tan ZHANG |
| School of Mechanical Engineering, Hebei University of Technology, Tianjin 300401, China |
引用本文:
张嘉宁,张明路,李满宏,张坦. 面向灰库清理的超大伸缩比机械臂结构设计与刚度优化[J]. 工程设计学报, 2022, 29(4): 430-437.
Jia-ning ZHANG,Ming-lu ZHANG,Man-hong LI,Tan ZHANG. Structural design and stiffness optimization of mechanical arm with super large telescopic ratio for ash silo cleaning[J]. Chinese Journal of Engineering Design, 2022, 29(4): 430-437.
链接本文:
https://www.zjujournals.com/gcsjxb/CN/10.3785/j.issn.1006-754X.2022.00.054
或
https://www.zjujournals.com/gcsjxb/CN/Y2022/V29/I4/430
|
| 1 |
李少华,刘冰,彭红文,等.燃煤机组耦合生物质直燃发电技术研究[J].电力勘测设计,2021(6):26-31,36.
LI Shao-hua, LIU Bing, PENG Hong-wen, et al. Bio-mass direct combustion of co-firing technology research in coal-fired power plants[J]. Electric Power Survey & Design, 2021(6): 26-31, 36.
|
| 2 |
潘尔生,田雪沁,徐彤,等.火电灵活性改造的现状、关键问题与发展前景[J].电力建设,2020,41(9):58-68. doi:10.12204/j.issn.1000-7229.2020.09.007
PAN Er-sheng, TIAN Xue-qin, XU Tong. Status, crit-ical problems and prospects of flexibility retrofit of thermal power in China[J]. Electric Power Construction, 2020, 41(9): 58-68.
doi: 10.12204/j.issn.1000-7229.2020.09.007
|
| 3 |
SINGH O K, KAUSHIK S C. Energy and exergy analysis and optimization of Kalina cycle coupled with a coal fired steam power plant[J]. Applied Thermal Engineering, 2013, 51(1/2): 787-800. doi:10.1016/j.applthermaleng.2012.10.006
doi: 10.1016/j.applthermaleng.2012.10.006
|
| 4 |
王宝存,侯泽健,李鹏飞.电厂粉煤灰筛选除湿设备的设计与研究[J].粉煤灰综合利用,2018(2):29-30,34. doi:10.3969/j.issn.1005-8249.2018.02.007
WANG Bao-cun, HOU Ze-jian, LI Peng-fei. Design and research of screening dehumidification equipment with power plant fly ash[J]. Fly Ash Comprehensive Utilization, 2018(2): 29-30, 34.
doi: 10.3969/j.issn.1005-8249.2018.02.007
|
| 5 |
刘建民,陈国庆,黄启龙,等.燃煤脱硝机组空气预热器蓄热片表面飞灰沉积板结机理研究[J].中国电机工程学报,2016,36(S1):132-139.
LIU Jian-min, CHEN Guo-qing, HUANG Qi-long, et al. Study on mechanism of fly ash deposition and hardening on the air preheater regenerative piece surface of the coal-fired and denitration unit[J]. Proceedings of the CSEE, 2016, 36(S1): 132-139.
|
| 6 |
罗宽.井下煤仓清仓机器人机械臂的设计与分析[J].煤炭技术,2013,32(8):41-43. doi:10.3969/j.issn.1008-8725.2013.08.021
LUO Kuan. Design and analysis of underound bunker clearing robot manipulator[J]. Coal Technology, 2013, 32(8): 41-43.
doi: 10.3969/j.issn.1008-8725.2013.08.021
|
| 7 |
曹毅,臧义,刁伟华.柔性驱动立筒仓清理机器人转动控制系统建模及简化[J].现代制造工程,2014(4):24-29. doi:10.3969/j.issn.1671-3133.2014.04.006
CAO Yi, ZANG Yi, DIAO Wei-hua. Systematic modeling and simplification on revolving control of flexible drive silo cleaning robot[J]. Modern Manufacturing Engineering, 2014(4): 24-29.
doi: 10.3969/j.issn.1671-3133.2014.04.006
|
| 8 |
DANDAN K, ALBITAR H, ANANIEV A, et al. Motion control of siro: The silo cleaning robot[J]. International Journal of Advanced Robotic Systems, 2015, 12: 184.
|
| 9 |
孙龙飞,房立金,梁风勇.新型工业机器人结构设计及其全域刚度预估方法[J].机器人,2018,40(5): 673-684. doi:10.1109/iisr.2018.8535652
SUN Long-fei, FANG Li-jin, LIANG Feng-yong. Str-ucture design and global stiffness protection method of a novel industrial robot[J]. Robot, 2018, 40(5): 673-684.
doi: 10.1109/iisr.2018.8535652
|
| 10 |
刘双杰,郝永平.S型折叠式微悬臂梁刚度计算[J].光学精密工程,2013,21(2):388-393.
LIU Shuang-jie, HAO Yong-ping. Calculation for spr-ing constants of folded serpentine microcantilevers[J].Optics and Precision Engineering, 2013, 21(2): 388-393.
|
| 11 |
关立文,陈志雄,刘春,等.钻铆机器人静刚度建模及优化[J].清华大学学报(自然科学版),2021,61(9):965-971.
GUAN Li-wen, CHEN Zhi-xiong, LIU Chun, et al. Static stiffness modeling for optimizing drilling and riveting robots[J]. Journal of Tsinghua University (Science and Technology), 2021, 61(9): 965-971.
|
| 12 |
MEMAR A H, ESFAHANI E T. A robot gripper with variable stiffness actuation for enhancing collision safety[J]. IEEE Transactions on Industrial Electronics, 2020, 67(8): 6607-6616. doi:10.1109/tie.2019.2938475
doi: 10.1109/tie.2019.2938475
|
| 13 |
邵忠喜,吴石磊,富宏亚.一种新型大口径光栅拼接柔性定位机构刚度分析[J].机械工程学报,2018,54(13):117-125. doi:10.3901/jme.2018.13.117
SHAO Zhong-xi, WU Shi-lei, FU Hong-ya. Stiffness analysis of a novel flexible positioning mechanism for large-aperture grating tiling[J]. Journal of Mechanical Engineering, 2018, 54(13): 117-125.
doi: 10.3901/jme.2018.13.117
|
| 14 |
吴青龙,周奇才,熊肖磊,等.塔式起重机臂架腹杆布局及尺寸优化设计[J].东北大学学报(自然科学版),2018,39(9):1309-1314.
WU Qing-long, ZHOU Qi-cai, XIONG Xiao-lei, et al.Layout and size optimization design of tower crane boom webs[J]. Journal of Northeastern University (Natural Science), 2018, 39(9): 1309-1314.
|
| 15 |
周奇才,吴青龙,熊肖磊,等.塔式起重机臂架周期性拓扑优化设计[J].同济大学学报(自然科学版),2017,45(10):1498-1505.
ZHOU Qi-cai, WU Qing-long, XIONG Xiao-lei, et al.Periodic topology optimization design of tower crane boom[J]. Journal of Tongji University (Natural Science), 2017, 45(10): 1498-1505.
|
| 16 |
毛艳,成凯.基于Hopfield神经网络的单缸插销式伸缩臂伸缩路径优化[J].吉林大学学报(工学版),2020,50(1):53-65.
MAO Yan, CHENG Kai. Telescopic path optimization of a single-cylinder pin-type multi-section boom based on Hopfield neural network[J]. Journal of Jilin University (Engineering and Technology Edition), 2020, 50(1): 53-65.
|
| 17 |
魏雅君,邱国梁,丁广和,等.一种重载码垛机器人结构优化设计方法[J].工程设计学报,2020,27(3):332-339. doi:10.3785/j.issn.1006-754X.2020.00.040
WEI Ya-jun, QIU Guo-liang, DING Guang-he, et al. A structural optimization design method for heavy-duty palletizing robot[J]. Chinese Journal of Engineering Design, 2020, 27(3): 332-339.
doi: 10.3785/j.issn.1006-754X.2020.00.040
|
| 18 |
刘昊,周成,于存贵.随车起重机伸缩臂截面多目标优化[J].机械设计与研究,2020,36(1):173-176.
LIU Hao, ZHOU Cheng, YU Cun-gui. Multi-objective optimization of telescopic boom section of truckmounted crane[J]. Machine Design & Research, 2020, 36(1): 173-176.
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|