| 机器人与机构设计 |
|

|
|
|
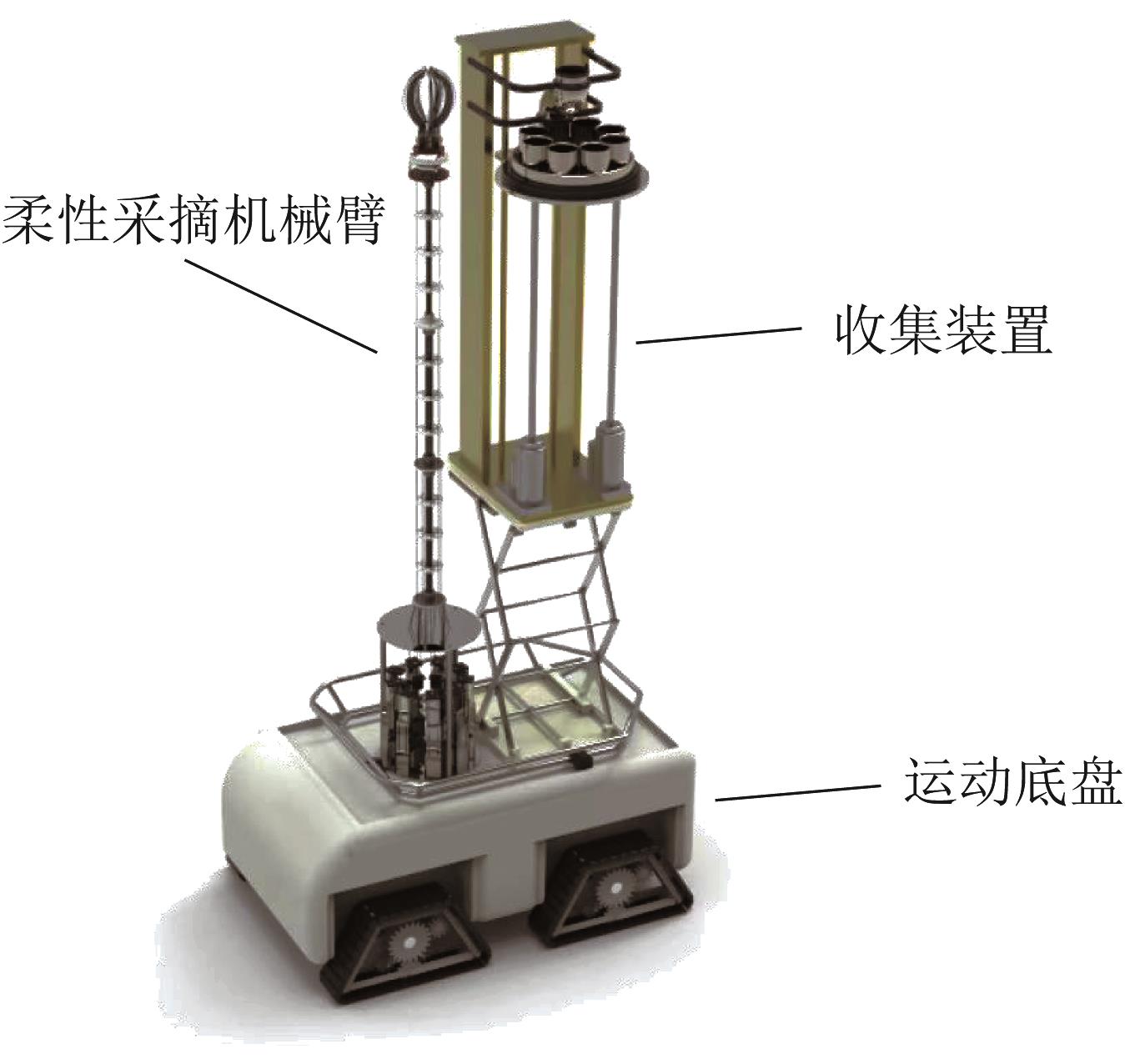
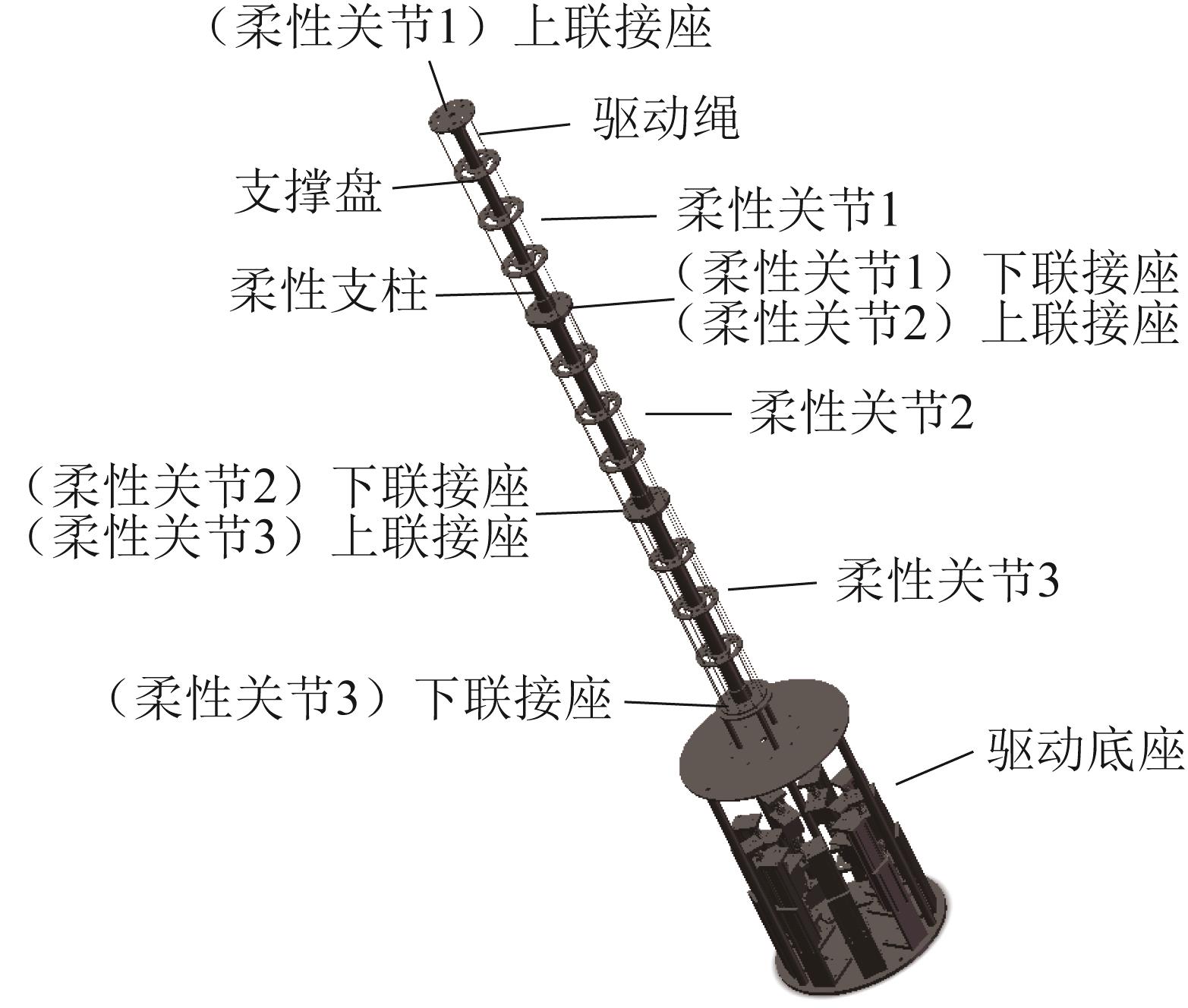
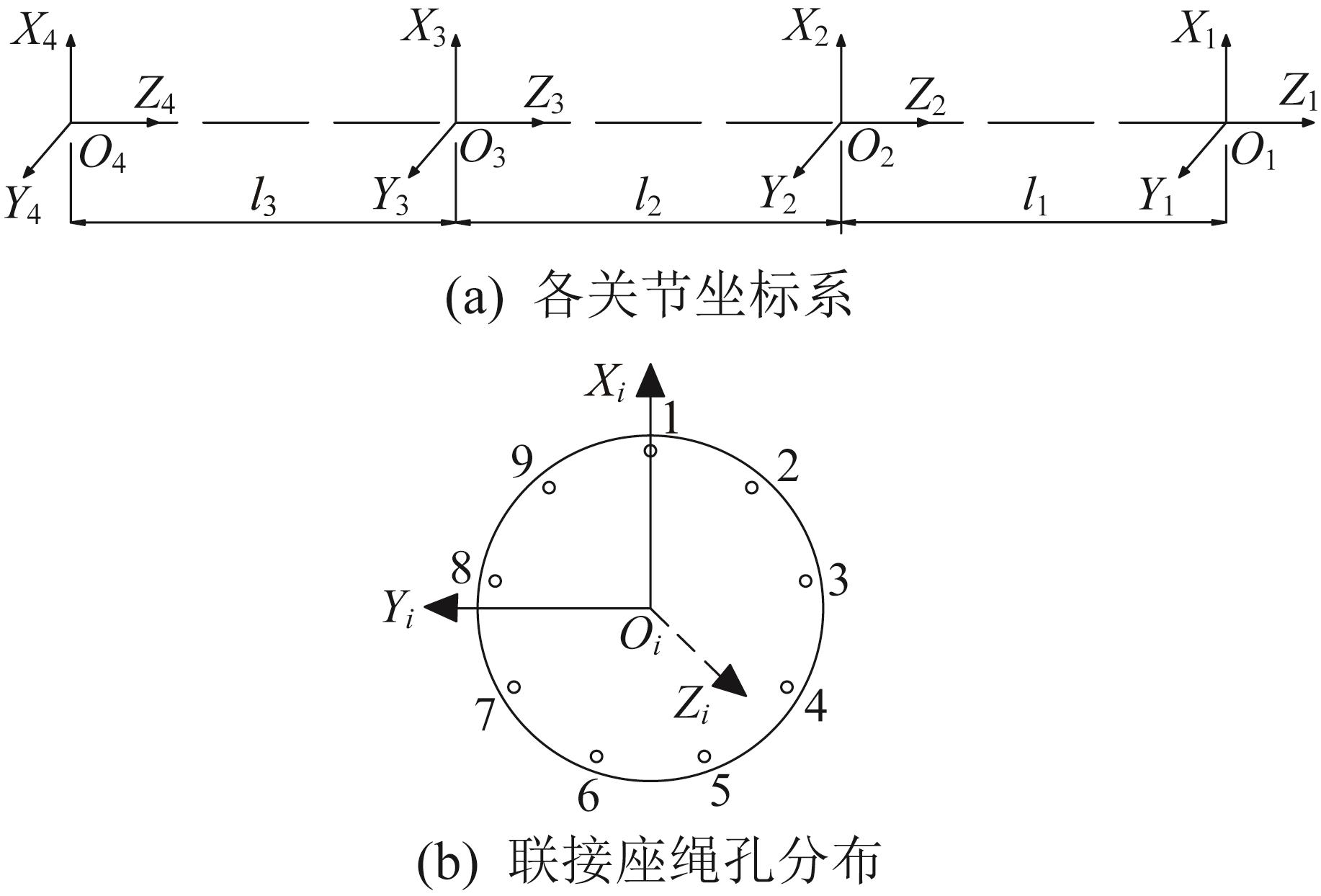
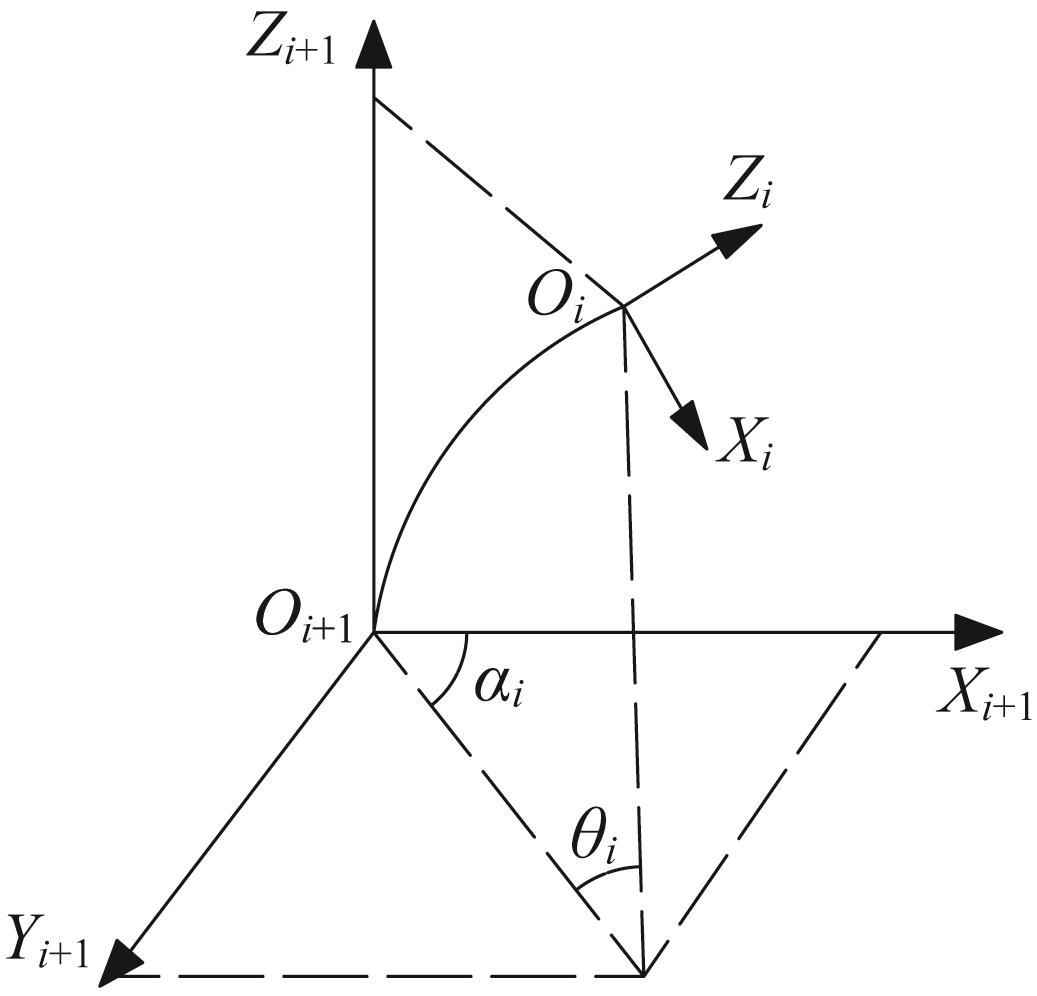
| 一种柔性采摘机械臂的运动学分析与仿真 |
张伟涛( ),赵栋杰(),王禄,包新棉,黄保赛 ),赵栋杰(),王禄,包新棉,黄保赛 |
| 聊城大学 机械与汽车工程学院,山东 聊城 252059 |
|
| Kinematics analysis and simulation of a flexible picking robot arm |
| Weitao ZHANG(),Dongjie ZHAO(),Lu WANG,Xinmian BAO,Baosai HUANG |
| School of Mechanical & Automotive Engineering, Liaocheng University, Liaocheng 252059, China |
引用本文:
张伟涛,赵栋杰,王禄,包新棉,黄保赛. 一种柔性采摘机械臂的运动学分析与仿真[J]. 工程设计学报, 2024, 31(2): 230-237.
Weitao ZHANG,Dongjie ZHAO,Lu WANG,Xinmian BAO,Baosai HUANG. Kinematics analysis and simulation of a flexible picking robot arm[J]. Chinese Journal of Engineering Design, 2024, 31(2): 230-237.
链接本文:
https://www.zjujournals.com/gcsjxb/CN/10.3785/j.issn.1006-754X.2024.03.135
或
https://www.zjujournals.com/gcsjxb/CN/Y2024/V31/I2/230
|
| 1 |
段洁利,陆华忠,王慰祖,等.水果采收机械的现状与发展[J].广东农业科学,2012,39(16):189-192. doi:10.3969/j.issn.1004-874X.2012.16.059
DUAN J L, LU H Z, WANG W Z, et al. Present situation and development of the fruit harvesting machinery[J]. Guangdong Agricultural Sciences, 2012, 39(16): 189-192.
doi: 10.3969/j.issn.1004-874X.2012.16.059
|
| 2 |
高国华,郑玉航,马帅,等.黄瓜采摘机械臂运动学分析与样机试验[J].中国农机化学报,2017,38(7):3-9.
GAO G H, ZHENG Y H, MA S, et al. Kinematic analysis and prototype test of cucumber harvesting manipulator[J]. Journal of Chinese Agricultural Mechanization, 2017, 38(7): 3-9.
|
| 3 |
张文翔,张兵园,贡宇,等.果蔬采摘机器人机械臂研究现状与展望[J].中国农机化学报,2022,43(9):232-237,244.
ZHANG W X, ZHANG B Y, GONG Y, et al. Research status and prospect of fruit and vegetable picking robot manipulator[J]. Journal of Chinese Agricultural Mechanization, 2022, 43(9): 232-237, 244.
|
| 4 |
王丽丽,范晋伟,赵博,等.果蔬采摘机械臂结构设计与性能测试[J].农业工程,2017,7(2):107-113,23. doi:10.3969/j.issn.2095-1795.2017.02.028
WANG L L, FAN J W, ZHAO B, et al. Structural design and performance test of fruit and vegetable picking manipulator[J]. Agricultural Engineering, 2017, 7(2): 107-113, 23.
doi: 10.3969/j.issn.2095-1795.2017.02.028
|
| 5 |
赵云伟,耿德旭,刘晓敏,等.气动柔性果蔬采摘机械手运动学分析与实验[J].农业机械学报,2019,50(8):31-42. doi:10.6041/j.issn.1000-1298.2019.08.004
ZHAO Y W, GENG D X, LIU X M, et al. Kinematics analysis and experiment of pneumatic flexible fruit and vegetable picking manipulator[J]. Transactions of the Chinese Society for Agricultural Machinery, 2019, 50(8): 31-42.
doi: 10.6041/j.issn.1000-1298.2019.08.004
|
| 6 |
WEBSTER R J, ROMANO J M, COWAN N J. Mechanics of precurved-tube continuum robots[J]. IEEE Transactions on Robotics, 2008, 25(1): 67-78.
|
| 7 |
MCMAHAN W, JONES B A, WALKER I D. Design and implementation of a multi-section continuum robot: Air-Octor[C]//IEEE/RSJ International Conference on Intelligent Robots and Systems. Edmonton, Aug. 2-6, 2005.
|
| 8 |
MCMAHAN W, CHITRAKARAN V, CSENCSITS M, et al. Field trials and testing of the octarm continuum manipulator[C]// Proceedings of the 2006 IEEE International Conference on Robotics and Automation. Orlando, May 15-19, 2006.
|
| 9 |
ZHANG L F, XU M, YANG H. Research on soft manipulator actuated by shape memory alloy (SMA) springs[C]//2017 IEEE International Conference on Real-time Computing and Robotics (RCAR). Okinawa, Jul. 14-18, 2017.
|
| 10 |
SIMAAN N. Snake-like units using flexible backbones and actuation redundancy for enhanced miniaturization[C]//Proceedings of the 2005 IEEE International Conference on Robotics and Automation. Barcelona, Apr. 18-22, 2005.
|
| 11 |
胡海燕,王鹏飞,孙立宁,等.线驱动连续型机器人的运动学分析与仿真[J].机械工程学报,2010,46(19):1-8. doi:10.3901/jme.2010.19.001
HU H Y, WANG P F, SUN L N, et al. Kinematic analysis and simulation for cable-driven continuum robot[J]. Journal of Mechanical Engineering, 2010, 46(19): 1-8.
doi: 10.3901/jme.2010.19.001
|
| 12 |
郭伟,肖滔,胡海燕,等.一种连续型肠道机器人的通过性研究与仿真[J].机械与电子,2010,28(7):63-67. doi:10.3969/j.issn.1001-2257.2010.07.019
GUO W, XIAO T, HU H Y, et al. Trafficability analysis and simulation for a continuum endoscope robot[J]. Machinery and Electronics, 2010, 28(7): 63-67.
doi: 10.3969/j.issn.1001-2257.2010.07.019
|
| 13 |
胡海燕,李伟达,李娟,等.结肠镜机器人结构设计与通过性研究[J].哈尔滨工程大学学报,2013,34(2):233-239. doi:10.3969/j.issn.1006-7043.201204049
HU H Y, LI W D, LI J, et al. Structure design and trafficability of colonoscopic robot[J]. Journal of Harbin Engineering University, 2013, 34(2): 233-239.
doi: 10.3969/j.issn.1006-7043.201204049
|
| 14 |
薛忠健.基于D-H法的锻造机器人运动学分析[J].机电工程技术,2020,49(11):40-42,128. doi:10.3969/j.issn.1009-9492.2020.11.010
XUE Z J. Kinematic analysis of forging robot based on D-H method[J]. Mechanical & Electrical Engineering Technology, 2020, 49(11): 40-42, 128.
doi: 10.3969/j.issn.1009-9492.2020.11.010
|
| 15 |
刘守法,王晋鹏,李勇,等.基于D-H法的5-DOF串并联机床运动学分析[J].制造技术与机床,2018(11):110-115.
LIU S F, WANG J P, LI Y, et al. Kinematics analysis of 5-DOF series-parallel machine tool based on D-H method[J]. Manufacturing Technology & Machine Tool, 2018(11): 110-115.
|
| 16 |
方方闻怡,梁医,冯虎田.基于D-H法的轨道摇臂摄影机器人运动学分析[J].机械设计与制造工程,2021,50(8):15-20. doi:10.3969/j.issn.2095-509X.2021.08.003
FANG F W Y, LIANG Y, FENG H T. Kinematics analysis of orbital rocker robot based on D-H method[J]. Machine Design and Manufacturing Engineering, 2021, 50(8): 15-20.
doi: 10.3969/j.issn.2095-509X.2021.08.003
|
| 17 |
白晓慧,何小娟,孙超利,等.基于分层学习的改进PSO算法求解复杂优化问题[J].太原科技大学学报,2021,42(3):169-174. doi:10.3969/j.issn.1673-2057.2021.03.001
BAI X H, HE X J, SUN C L, et al. Particle swarm optimization algorithm based on hierarchical learning for complex optimization problem[J]. Journal of Taiyuan University of Science and Technology, 2021, 42(3): 169-174.
doi: 10.3969/j.issn.1673-2057.2021.03.001
|
| 18 |
薛永生,吴立尧.基于模拟退火的改进粒子群算法研究及应用[J].海军航空工程学院学报,2018,33(2):248-252. doi:10.7682/j.issn.1673-1522.2018.02.012
XUE Y S, WU L Y. Research and application of improved PSO algorithm based on simulated annealing[J]. Journal of Naval Aeronautical and Astronautical University, 2018, 33(2): 248-252.
doi: 10.7682/j.issn.1673-1522.2018.02.012
|
| 19 |
周驰,高海兵,高亮,等.粒子群优化算法[J].计算机应用研究,2003,20(12):7-11. doi:10.3969/j.issn.1001-3695.2003.12.003
ZHOU C, GAO H B, GAO L, et al. Particle swarm optimization (PSO) algorithm[J]. Application Research of Computers, 2003, 20(12): 7-11.
doi: 10.3969/j.issn.1001-3695.2003.12.003
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|