| 机械设计理论与方法 |
|


|
|
|
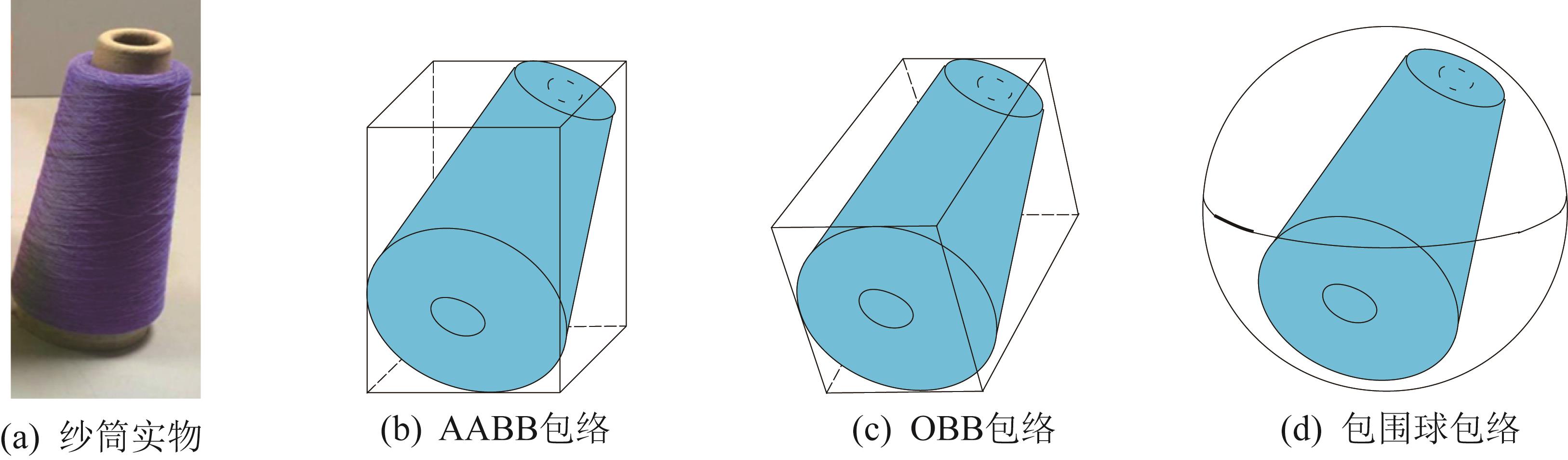
| 基于层次包围盒的纱筒装取机械臂碰撞检测方法 |
姬晨辉1( ),沈丹峰1(),赵刚2,孙海涛1 ),沈丹峰1(),赵刚2,孙海涛1 |
1.西安工程大学 机电工程学院,陕西 西安 710048
2.陕西长岭纺织机电科技有限公司,陕西 宝鸡 721013 |
|
| Collision detection method for yarn cylinder loading robotic arm based on hierarchical bounding box |
| Chenhui JI1(),Danfeng SHEN1(),Gang ZHAO2,Haitao SUN1 |
1.School of Mechanical and Electrical Engineering, Xi'an Polytechnic University, Xi'an 710048, China
2.Shaanxi Changling Textile Mechanical & Electronic Technological Co. , Ltd. , Baoji 721013, China |
引用本文:
姬晨辉,沈丹峰,赵刚,孙海涛. 基于层次包围盒的纱筒装取机械臂碰撞检测方法[J]. 工程设计学报, 2025, 32(6): 769-779.
Chenhui JI,Danfeng SHEN,Gang ZHAO,Haitao SUN. Collision detection method for yarn cylinder loading robotic arm based on hierarchical bounding box[J]. Chinese Journal of Engineering Design, 2025, 32(6): 769-779.
链接本文:
https://www.zjujournals.com/gcsjxb/CN/10.3785/j.issn.1006-754X.2025.05.136
或
https://www.zjujournals.com/gcsjxb/CN/Y2025/V32/I6/769
|
| [15] |
XIE H, SU F Z, YIN J N, et al. Network modeling and refined management of UAV flight conflicts in complex low altitude airspace[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(18): 328226.
|
| [16] |
江亦涵, 王挺, 李亚伟, 等. 双七自由度臂防碰撞协同控制算法研究[J]. 高技术通讯, 2023, 33(7): 750-761.
JIANG Y H, WANG T, LI Y W, et al. Research on the control system of cooperative work of double seven degrees of freedom arm robot[J]. Chinese High Technology Letters, 2023, 33(7): 750-761.
|
| [17] |
张然, 杨子辉, 孙国民, 等. 用于连续碰撞检测的线性动态分离轴算法[J]. 计算机辅助设计与图形学学报, 2024, 36(10): 1647-1652. doi:10.3724/sp.j.1089.2024.20070
ZHANG R, YANG Z H, SUN G M, et al. Linear dynamic separating axis algorithm for continuous collision detection[J]. Journal of Computer-Aided Design & Computer Graphics, 2024, 36(10): 1647-1652.
doi: 10.3724/sp.j.1089.2024.20070
|
| [18] |
吴寿英, 李炜. 基于分离轴算法的机场场面飞行器冲突告警研究[J]. 计算机应用与软件, 2023, 40(3): 72-76, 156.
WU S Y, LI W. Research on aircraft collision warning at airport scene based on separation axis algorithm[J]. Computer Applications and Software, 2023, 40(3): 72-76, 156.
|
| [19] |
FLORES-CABALLERO G, RODRÍGUEZ-MOLINA A, ALDAPE-PÉREZ M, et al. Optimized path-planning in continuous spaces for unmanned aerial vehicles using meta-heuristics[J]. IEEE Access, 2020, 8: 176774-176788.
|
| [20] |
MONTAUT L, LE LIDEC Q, PETRIK V, et al. GJK++: leveraging acceleration methods for faster collision detection[J]. IEEE Transactions on Robotics, 2024, 40: 2564-2581.
|
| [21] |
NESTEROV Y. Lectures on convex optimization[M]. 2nd ed. Cham: Springer, 2018.
|
| [1] |
许高平, 孙以泽. 移动机械臂牵引卷装纱线的动态建模与控制[J]. 纺织学报, 2024, 45(1): 1-11.
XU G P, SUN Y Z. Dynamic modeling and control of package yarn pulled by mobile manipulator[J]. Journal of Textile Research, 2024, 45(1): 1-11.
|
| [22] |
YANDUN F, PARHAR T, SILWAL A, et al. Reaching pruning locations in a vine using a deep reinforcement learning policy[C]//2021 IEEE International Conference on Robotics and Automation. Xi'an, May 30-Jun. 5, 2021.
|
| [2] |
毛慧敏, 屠佳佳, 孙磊, 等. 适应多类型纱筒的换筒末端执行器关键技术[J]. 纺织学报, 2024, 45(6): 193-200.
MAO H M, TU J J, SUN L, et al. Key technology research of bobbin change actuator suitable for multiple bobbin types[J]. Journal of Textile Research, 2024, 45(6): 193-200.
|
| [3] |
ZAND M, ETEMAD A, GREENSPAN M. Oriented bounding boxes for small and freely rotated objects[J]. IEEE Transactions on Geoscience and Remote Sensing, 2021, 60: 4701715.
|
| [4] |
VITSAS N, EVANGELOU I, PAPAIOANNOU G, et al. Parallel transformation of bounding volume hierarchies into oriented bounding box trees[J]. Computer Graphics Forum, 2023, 42(2): 245-254.
|
| [5] |
LUBBE R, XU W J, WILKE D N, et al. Analysis of parallel spatial partitioning algorithms for GPU based DEM[J]. Computers and Geotechnics, 2020, 125: 103708.
|
| [6] |
ALSHAMRANI R, ALSHEHRI F, KURDI H. A preprocessing technique for fast convex hull computation[J]. Procedia Computer Science, 2020, 170: 317-324.
|
| [7] |
张宇, 张得礼, 张文奇, 等. 基于混合层次包围盒的水下训练机械臂碰撞检测方法研究[J]. 载人航天, 2022, 28(5): 627-636.
ZHANG Y, ZHANG D L, ZHANG W Q, et al. Research on collision detection method of underwater training manipulator based on hybrid hierarchical bounding box[J]. Manned Spaceflight, 2022, 28(5): 627-636.
|
| [8] |
靳雁霞, 乔星宇, 张翎, 等. 布料与刚体模型间的空间网格碰撞检测方法[J]. 中国图象图形学报, 2024, 29(10): 3144-3156. doi:10.11834/jig.230543
JIN Y X, QIAO X Y, ZHANG L, et al. Collision detection method between fabric and complex models in a space mesh[J]. Journal of Image and Graphics, 2024, 29(10): 3144-3156.
doi: 10.11834/jig.230543
|
| [9] |
唐源皓, 侯进, 吴婷婷, 等. 基于质点转换和包围盒的混合碰撞检测算法[J]. 哈尔滨工程大学学报, 2018, 39(10): 1695-1701.
TANG Y H, HOU J, WU T T, et al. Hybrid collision detection algorithm based on particle conversion and bounding box[J]. Journal of Harbin Engineering University, 2018, 39(10): 1695-1701.
|
| [10] |
SAFEEA M, MENDES N, NETO P. Minimum distance calculation for safe human robot interaction[J]. Procedia Manufacturing, 2017, 11: 99-106.
|
| [11] |
朱博承, 王志军, 李占贤. 碰撞检测及其在机器人领域中的应用研究综述[J]. 机床与液压, 2023, 51(16): 201-210.
ZHU B C, WANG Z J, LI Z X. A review of collision detection and its application in robotics[J]. Machine Tool & Hydraulics, 2023, 51(16): 201-210.
|
| [12] |
XIONG Y, GE Y Y, GRIMSTAD L, et al. An autonomous strawberry-harvesting robot: design, development, integration, and field evaluation[J]. Journal of Field Robotics, 2020, 37(2): 202-224.
|
| [13] |
SCHÜTZ M, OHRHALLINGER S, WIMMER M. Fast out-of-core octree generation for massive point clouds[J]. Computer Graphics Forum, 2020, 39(7): 155-167.
|
| [14] |
ÅBLAD E, SPENSIERI D, BOHLIN R, et al. Continuous collision detection of pairs of robot motions under velocity uncertainty[J]. IEEE Transactions on Robotics, 2021, 37(5): 1780-1791.
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|