| 优化设计 |
|

|
|
|
| 基于改进麻雀搜索算法的机械臂多目标轨迹优化方法 |
李玲1,2( ),侯玉龙1,2,李瑶1,2,罗丹1,解妙霞1 ),侯玉龙1,2,李瑶1,2,罗丹1,解妙霞1 |
1.西安建筑科技大学 机电工程学院,陕西 西安 710055
2.西安市重型机械装备智能化技术重点实验室,陕西 西安 710311 |
|
| Multi-objective trajectory optimization method for manipulator based on improved sparrow search algorithm |
| Ling LI1,2(),Yulong HOU1,2,Yao LI1,2,Dan LUO1,Miaoxia XIE1 |
1.School of Mechanical and Electrical Engineering, Xi'an University of Architecture and Technology, Xi'an 710055, China
2.Xi'an Key Laboratory of Intelligent Technology for Heavy Machinery Equipment, Xi'an 710311, China |
引用本文:
李玲,侯玉龙,李瑶,罗丹,解妙霞. 基于改进麻雀搜索算法的机械臂多目标轨迹优化方法[J]. 工程设计学报, 2025, 32(5): 664-674.
Ling LI,Yulong HOU,Yao LI,Dan LUO,Miaoxia XIE. Multi-objective trajectory optimization method for manipulator based on improved sparrow search algorithm[J]. Chinese Journal of Engineering Design, 2025, 32(5): 664-674.
链接本文:
https://www.zjujournals.com/gcsjxb/CN/10.3785/j.issn.1006-754X.2025.05.111
或
https://www.zjujournals.com/gcsjxb/CN/Y2025/V32/I5/664
|
| [8] |
WU J C, ZHANG Z W, YANG Y D, et al. Time optimal trajectory planning of robotic arm based on improved tuna swarm algorithm[J]. Computer Integrated Manufacturing Systems, 2024, 30(12): 4292-4301.
|
| [9] |
XUE J K, SHEN B. A novel swarm intelligence optimization approach: sparrow search algorithm[J]. Systems Science & Control Engineering, 2020, 8(1): 22-34.
|
| [10] |
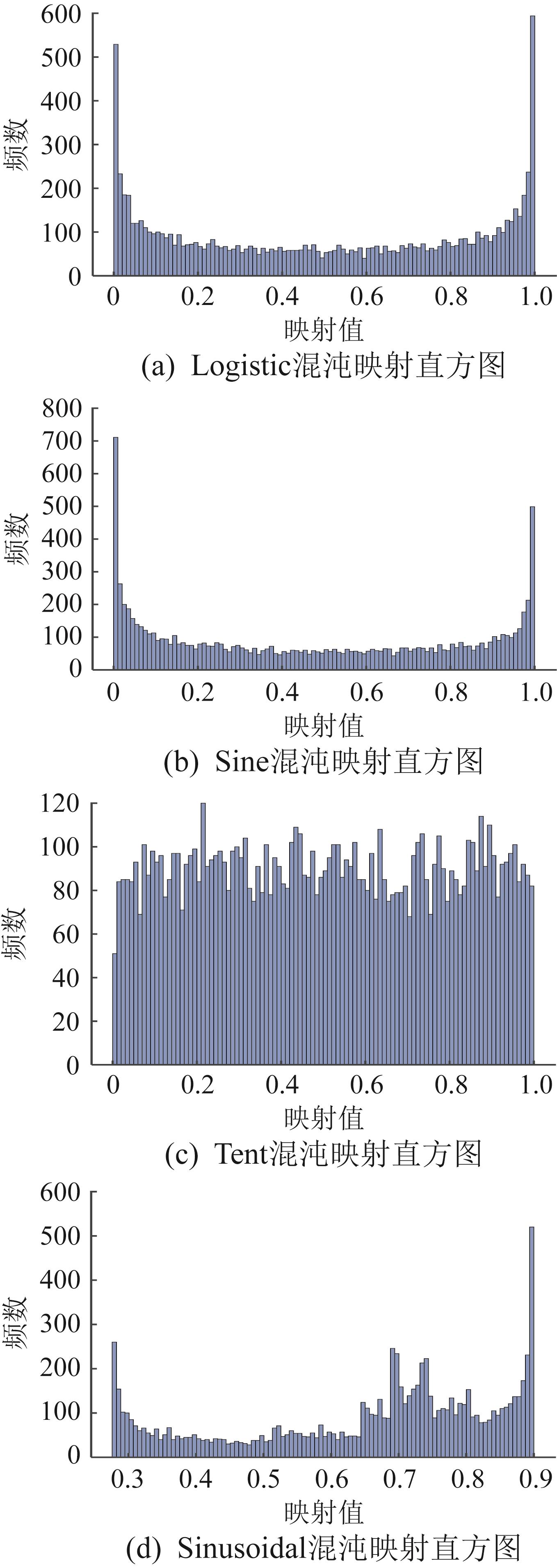
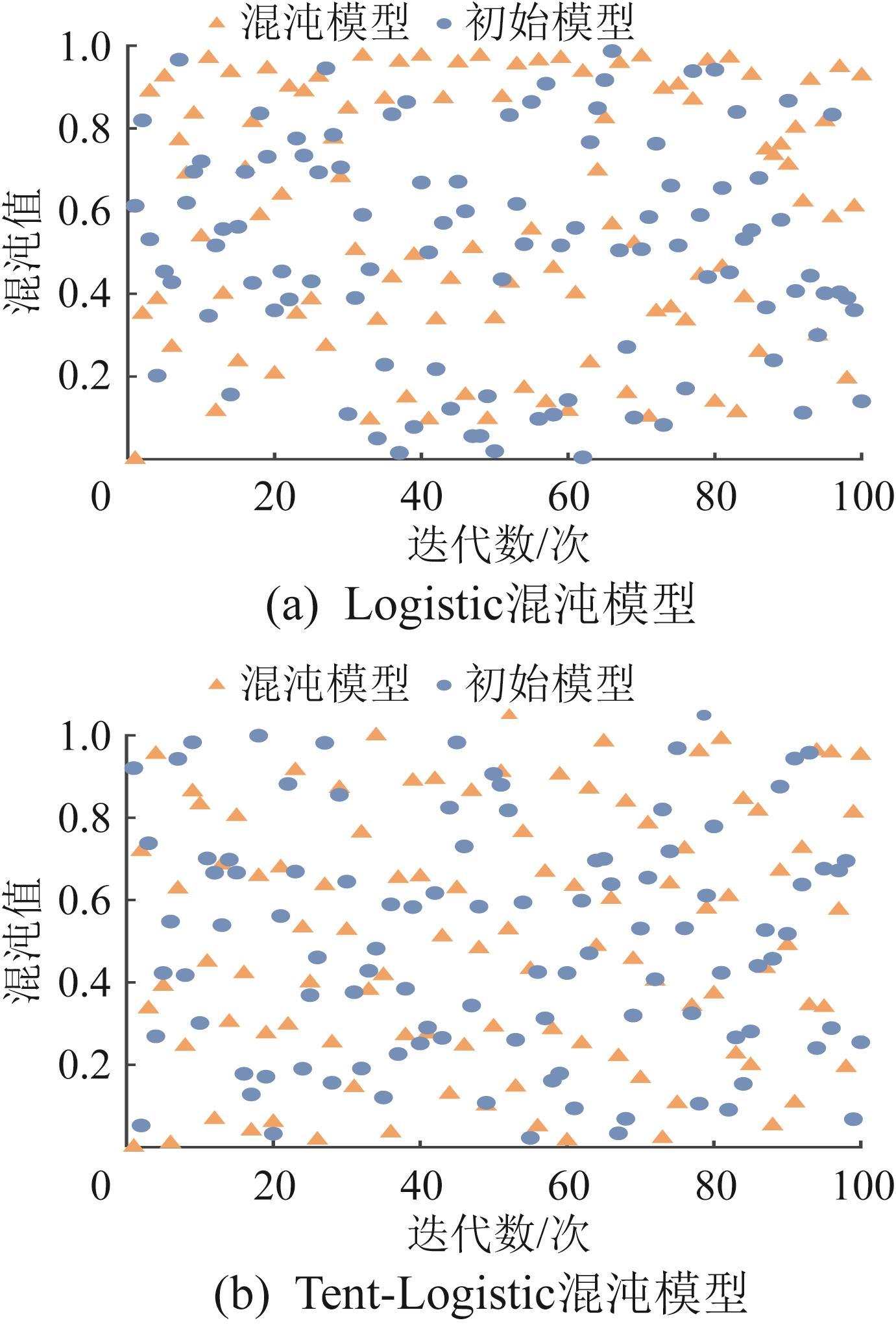
吕鑫, 慕晓冬, 张钧, 等. 混沌麻雀搜索优化算法[J]. 北京航空航天大学学报, 2021, 47(8): 1712-1720.
LÜ X, MU X D, ZHANG J, et al. Chaos sparrow search optimization algorithm[J]. Journal of Beijing University of Aeronautics and Astronautics, 2021, 47(8): 1712-1720.
|
| [11] |
邱冰, 李小兵, 石志新, 等. 多策略改进麻雀算法在机械臂时间最优轨迹规划中的应用[J]. 机械科学与技术, 2024, 43(10): 1714-1722.
QIU B, LI X B, SHI Z X, et al. Application of multi-strategy improved sparrow algorithm in time optimal trajectory planning of manipulator[J]. Mechanical Science and Technology for Aerospace Engineering, 2024, 43(10): 1714-1722.
|
| [12] |
季海涛, 靳华伟. 多策略改进型麻雀算法在水下伸缩臂轨迹定位的应用[J]. 机床与液压, 2023, 51(15): 50-56.
JI H T, JIN H W. Application of multi-strategy improved sparrow algorithm in trajectory location of underwater telescopic boom[J]. Machine Tool & Hydraulics, 2023, 51(15): 50-56.
|
| [13] |
LIU J, ZHU H T, CHEN Y, et al. Path following of an underwater snake-like robot exposed to ocean currents and locomotion efficiency optimization based on multi-strategy improved sparrow search algorithm[J]. Journal of Marine Science and Engineering, 2023, 11(6): 1236.
|
| [14] |
顾清华, 姜秉佼, 常朝朝, 等. 求解大规模优化问题的改进麻雀搜索算法[J]. 控制与决策, 2023, 38(7): 1960-1968.
GU Q H, JIANG B J, CHANG Z Z, et al. An improved sparrow search algorithm for solving large-scale optimization problems[J]. Control and Decision, 2023, 38(7): 1960-1968.
|
| [15] |
李昕燃, 靳伍银. 基于改进麻雀算法优化支持向量机的滚动轴承故障诊断研究[J]. 振动与冲击, 2023, 42(6): 106-114.
|
| [1] |
陆一, 王萍, 李书福, 等. 传统制造必须向智能制造转变[J]. 中国质量监管, 2016(10): 70-71.
LU Y, WANG P, LI S F, et al. Traditional manufacturing must be transformed into intelligent manufacturing[J]. China Quality Supervision, 2016(10): 70-71.
|
| [15] |
LI X R, JIN W Y. Fault diagnosis of rolling bearings based on ISSA-SVM[J]. Journal of Vibration and Shock, 2023, 42(6): 106-114.
|
| [16] |
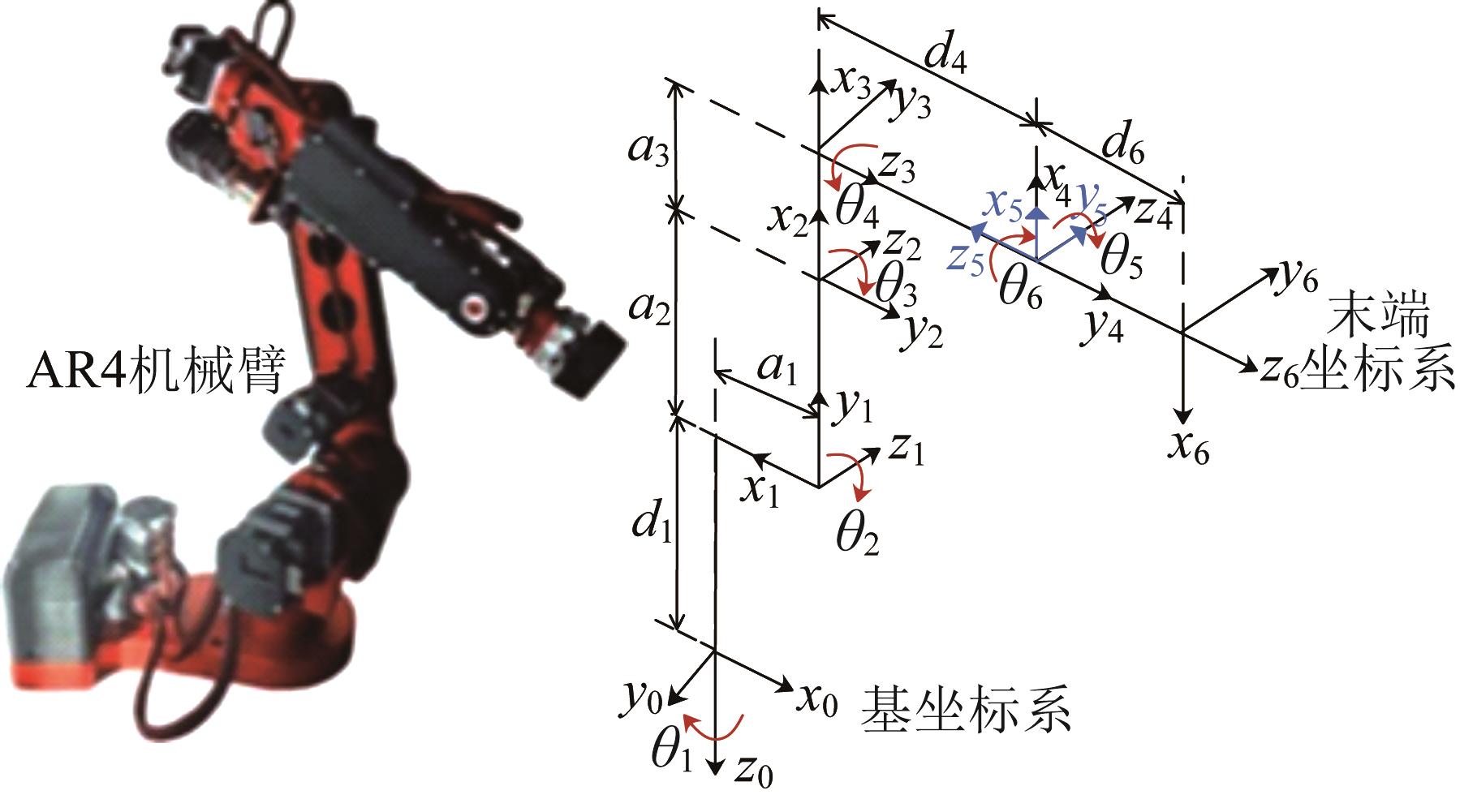
何康佳, 何玲, 冯磊, 等. 六轴机器人的运动学建模与轨迹规划研究[J]. 机床与液压, 2020, 48(12): 171-176, 183.
HE K J, HE L, FENG L, et al. Research on kinematic modeling and trajectory planning of six-axis robot[J]. Machine Tool & Hydraulics, 2020, 48(12): 171-176, 183.
|
| [17] |
郭锐, 石月, 李永涛, 等. 液压凿岩机器人机械臂轨迹规划研究[J]. 中国工程机械学报, 2021, 19(4): 289-294.
GUO R, SHI Y, LI Y T, et al. Research on trajectory planning of hydraulic rock drilling robot manipulator[J]. Chinese Journal of Construction Machinery, 2021, 19(4): 289-294.
|
| [18] |
GUPTA S, DEEP K. A hybrid self-adaptive sine cosine algorithm with opposition based learning[J]. Expert Systems with Applications, 2019, 119: 210-230.
|
| [19] |
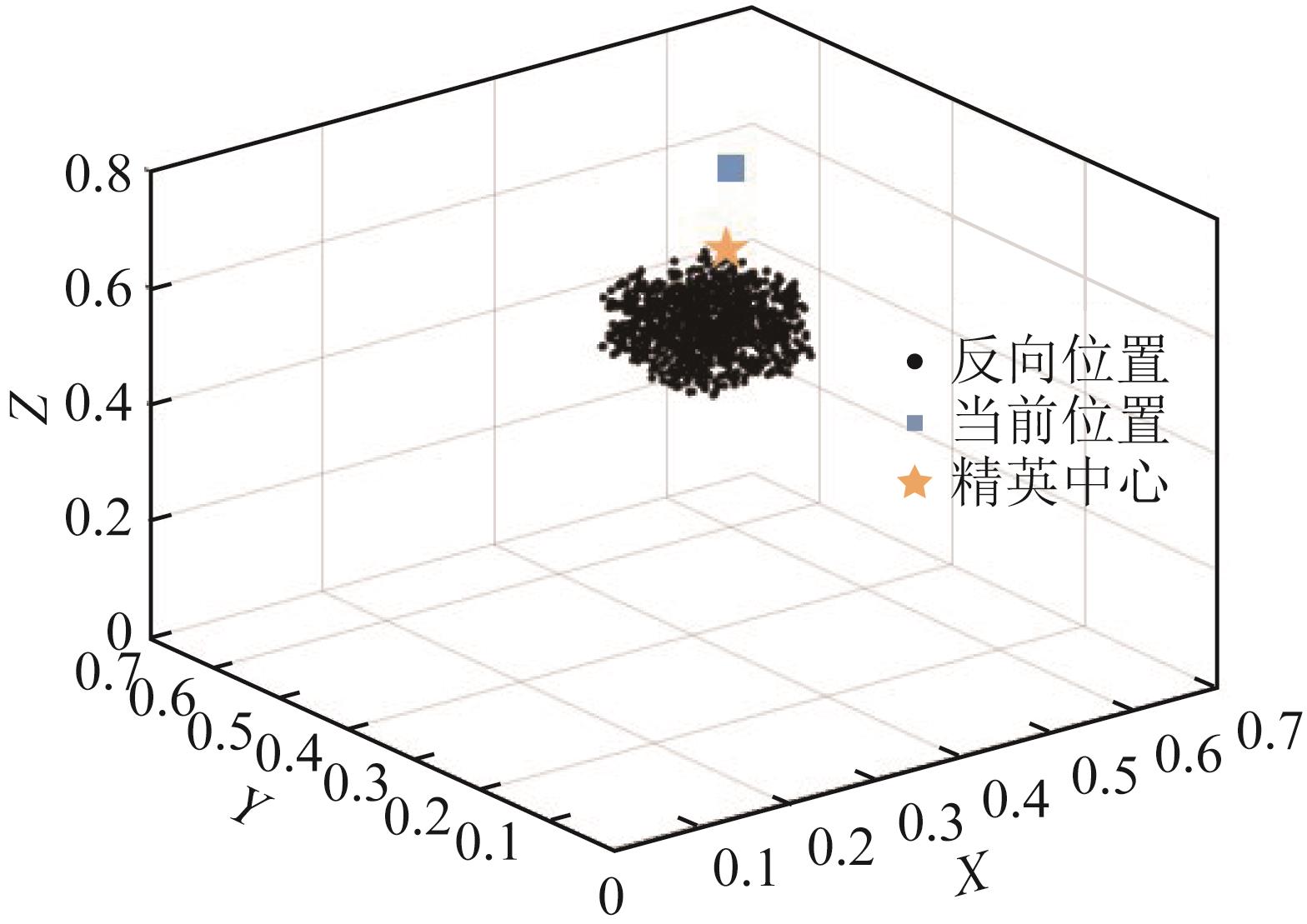
郭文艳, 王远, 戴芳, 等. 基于精英混沌搜索策略的交替正余弦算法[J]. 控制与决策, 2019, 34(8): 1654-1662.
GUO W Y, WANG Y, DAI F, et al. Alternating sine cosine algorithm based on elite chaotic search strategy[J]. Control and Decision, 2019, 34(8): 1654-1662.
|
| [20] |
GHAREHCHOPOGH F S, NAMAZI M, EBRAHIMI L, et al. Advances in sparrow search algorithm: a comprehensive survey[J]. Archives of Computational Methods in Engineering, 2023, 30(1): 427-455.
|
| [21] |
WANG W C, XU L, CHAU K W, et al. Yin-yang firefly algorithm based on dimensionally Cauchy mutation[J]. Expert Systems with Applications, 2020, 150: 113216.
|
| [22] |
DUAN J H, GONG Y P, LUO J, et al. Air-quality prediction based on the ARIMA-CNN-LSTM combination model optimized by dung beetle optimizer[J]. Scientific Reports, 2023, 13(1): 12127.
|
| [2] |
白克强. 双臂机器人拟人化动作实现与协调控制方法研究[D]. 合肥: 中国科学技术大学, 2017.
BAI K Q. Research on human-like arm motion generation and cooperation control method for humanoid dual-arm robots[D]. Hefei: University of Science and Technology of China, 2017.
|
| [3] |
董理, 杨东, 鹿建森. 工业机器人轨迹规划方法综述[J]. 控制工程, 2022, 29(12): 2365-2374.
DONG L, YANG D, LU J S. Trajectory planning methods for industrial robots: a review[J]. Control Engineering of China, 2022, 29(12): 2365-2374.
|
| [4] |
朱战霞, 靖飒, 仲剑飞, 等. 基于碰撞检测的空间冗余机械臂避障路径规划[J]. 西北工业大学学报, 2020, 38(1): 183-190. doi:10.1051/jnwpu/20203810183
ZHU Z X, JING S, ZHONG J F, et al. Obstacle avoidance path planning of space redundant manipulator based on a collision detection algorithm[J]. Journal of Northwestern Polytechnical University, 2020, 38(1): 183-190.
doi: 10.1051/jnwpu/20203810183
|
| [5] |
蔡永超. 机械臂关节空间轨迹的时间最优智能规划研究[J]. 机械设计与制造, 2020(3): 272-276.
CAI Y C. Mechanical arm trajectory optimal time intelligent planning in the joint space[J]. Machinery Design & Manufacture, 2020(3): 272-276.
|
| [6] |
孙颙琰, 郭文勇, 孙云岭, 等. 基于自适应变换蝙蝠算法的机械臂轨迹优化[J]. 机械传动, 2022, 46(5): 35-41.
SUN Y Y, GUO W Y, SUN Y L, et al. Trajectory optimization of manipulator based on adaptive transformation bat algorithm[J]. Journal of Mechanical Transmission, 2022, 46(5): 35-41.
|
| [7] |
谢嘉, 吴家桢, 李永国, 等. 改进粒子群优化算法在机械臂轨迹规划中的应用[J]. 机械科学与技术, 2024, 43(10): 1681-1686.
XIE J, WU J Z, LI Y G, et al. Applying improved particle swarm optimization algorithm to trajectory planning of manipulator[J]. Mechanical Science and Technology for Aerospace Engineering, 2024, 43(10): 1681-1686.
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|