| 机械优化设计 |
|


|
|
|
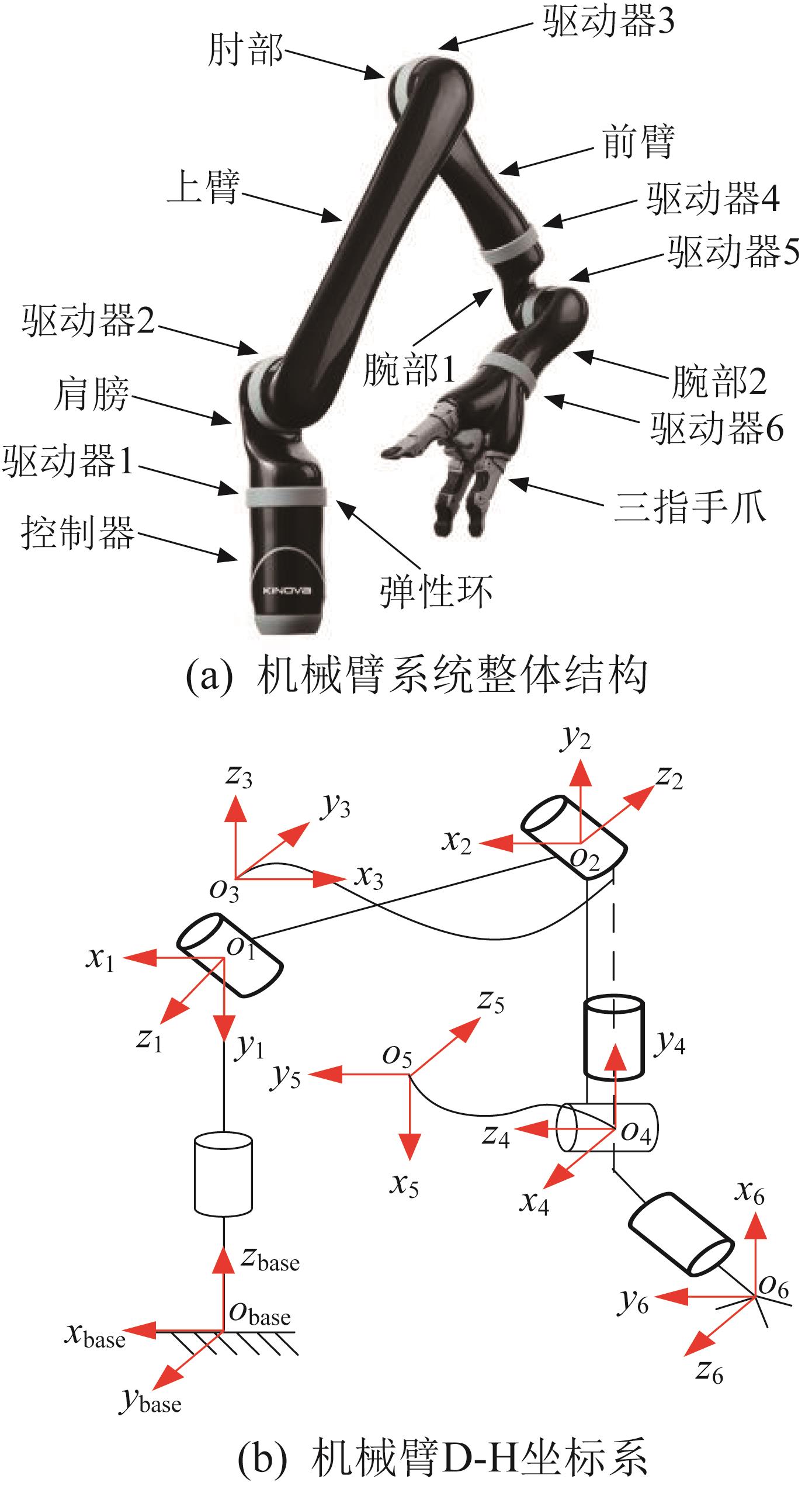
| 基于自适应神经网络的机械臂滑模轨迹跟踪控制 |
李琦琦1( ),徐向荣1(),张卉1,2 ),徐向荣1(),张卉1,2 |
1.安徽工业大学 机械工程学院,安徽 马鞍山 243032
2.安徽工业大学 冶金工程学院,安徽 马鞍山 243032 |
|
| Sliding mode trajectory tracking control of manipulator based on adaptive neural network |
| Qiqi LI1(),Xiangrong XU1(),Hui ZHANG1,2 |
1.School of Mechanical Engineering, Anhui University of Technology, Maanshan 243032, China
2.School of Metallurgical Engineering, Anhui University of Technology, Maanshan 243032, China |
| 1 |
PIZARRO-LERMA A O, GARCIA-HERNANDEZ R, SANTIBANEZ V, et al. Experimental evaluation of a sectorial fuzzy controller plus adaptive neural network compensation applied to a 2-DOF robot manipulator[J]. IFAC-Papers OnLine, 2019, 52(29): 233-238.
|
| 2 |
CRUZ-ORTIZ D, CHAIREZ I, POZNYAK A. Adaptive sliding-mode trajectory tracking control for state constraint master‒slave manipulator systems[J]. ISA Transactions, 2022, 127: 273-282.
|
| 3 |
赵希梅,金鸿雁.永磁直线同步电机伺服系统的分段变论域模糊迭代学习控制[J].电工技术学报,2017,32(23):9-15.
ZHAO X M, JIN H Y. Segmented variable universe fuzzy iterative learning control for permanent magnet linear synchronous motor servo system[J]. Transactions of China Electrotechnical Society, 2017, 32(23): 9-15.
|
| 4 |
张润梅,夏旭,袁彬,等.多关节机械臂神经网络超螺旋滑模控制[J].兵器装备工程学报,2022,43(8):258-264. doi:10.11809/bqzbgcxb2022.08.040
ZHANG R M, XIA X, YUAN B, et al. Super-twisting sliding mode control of neural network for multi-joint manipulator[J]. Journal of Ordnance Equipment Engineering, 2022, 43(8): 258-264.
doi: 10.11809/bqzbgcxb2022.08.040
|
| 5 |
吴定会,肖仁,欧阳洪才,等.机械臂的改进固定时间滑模控制方法设计[J].机械科学与技术,2021,40(8):1171-1176.
WU D H, XIAO R, OUYANG H C, et al. Design of improved fixed time sliding mode control method for manipulator trajectory tracking[J]. Mechanical Science and Technology for Aerospace Engineering, 2021, 40(8): 1171-1176.
|
| 6 |
孟琪迪,南新元,张永兴.基于PD型迭代学习的机械臂轨迹跟踪控制[J].组合机床与自动化加工技术,2022(11):62-65,69.
MENG Q D, NAN X Y, ZHANG Y X. Trajectory tracking control of manipulator based on PD type iterative learning[J]. Modular Machine Tool & Automatic Manufacturing Technique, 2022(11): 62-65, 69.
|
| 7 |
张卉,朱永飞,刘雪飞,等.基于模糊迭代Q-学习的冶金工业机器人轨迹跟踪控制研究[J].工程设计学报,2022,29(5):564-571. doi:10.3785/j.issn.1006-754X.2022.00.073
ZHANG H, ZHU Y F, LIU X F, et al. Research on trajectory tracking control of metallurgical industrial robot based on fuzzy iterative Q-learning[J]. Chinese Journal of Engineering Design, 2022, 29(5): 564-571.
doi: 10.3785/j.issn.1006-754X.2022.00.073
|
| 8 |
CHEN J X, LI J M. Fuzzy adaptive iterative learning coordination control of second-order multi-agent systems with imprecise communication topology structure[J]. International Journal of Systems Science, 2018, 49(1/4): 546-556.
|
| 9 |
张建宇,高天宇,于潇雁,等.基于自适应时延估计的空间机械臂连续非奇异终端滑模控制[J].机械工程学报,2021,57(11):177-183. doi:10.3901/jme.2021.11.177
ZHANG J Y, GAO T Y, YU X Y, et al. Continuous non-singular terminal sliding mode control of space robot based on adaptive time delay estimation[J]. Journal of Mechanical Engineering, 2021, 57(11): 177-183.
doi: 10.3901/jme.2021.11.177
|
| 10 |
葛为民,闫珂珂,王肖锋,等.可重构机械臂的鲁棒模糊自适应补偿控制[J].系统仿真学报,2018,30(5):1950-1956.
GE W M, YAN K K, WANG X F, et al. Robust fuzzy adaptive compensation control of reconfigurable manipulator[J]. Journal of System Simulation, 2018, 30(5): 1950-1956.
|
| 11 |
VIJAY M, JENA D. Backstepping terminal sliding mode control of robot manipulator using radial basis functional neural networks[J]. Computers and Electrical Engineering, 2018, 67: 690-707.
|
| 12 |
LEE J Y, CHANG P H, JIN M L. Adaptive integral sliding mode control with time-delay estimation for robot manipulators[J]. IEEE Transactions on Industrial Electronics, 2017, 64(8): 6796-6804.
|
| 13 |
杨亮,陈勇,刘治.基于参数不确定机械臂系统的自适应轨迹跟踪控制[J].控制与决策,2019,34(11):2485-2490.
YANG L, CHEN Y, LIU Z. Adaptive trajectory tracking control for manipulator with uncertain dynamics and kinematics[J]. Control and Decision, 2019, 34(11): 2485-2490.
|
| 14 |
DUAN J J, GAN Y H, CHENG M, et al. Symmetrical adaptive variable admittance control for position/force tracking of dual-arm cooperative manipulators with unknown trajectory deviations[J]. Robotics and Computer-Integrated Manufacturing, 2019, 57(3): 357-369.
|
| 15 |
DWIVEDI A, SHIEFF D, TURNER A, et al. A shared control framework for robotic telemanipulation combining electromyography based motion estimation and compliance control[C]//2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, May 30-Jun. 5, 2021.
|
| 16 |
GILLINI G, LILLO P D, ARRICHIELLO F. An assistive shared control architecture for a robotic arm using EEG-based BCI with motor imagery[C]//2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Prague, Sep. 27-Oct. 1, 2021.
|
| 17 |
何欣荣,张刚.机械臂的固定时间非奇异滑模自适应控制[J].组合机床与自动加工技术,2022(9):84-87.
HE X R, ZHANG G. Fixed-time nonsingular sliding mode adaptive control of manipulator[J]. Modular Machine Tool & Automatic Manufacturing Technique, 2022(9): 84-87.
|
| 18 |
郭宇飞,许盛悦,李慧子,等.基于改进滑模趋近律的振动基机械臂的有限时间轨迹跟踪控制[J].振动与冲击,2022,41(20):86-92,194.
GUO Y F, XU S Y, LI H Z, et al. Finite-time trajectory tracking control of oscillatory-based manipulators based on an improved sliding mode reaching law[J]. Journal of Vibration and Shock, 2022, 41(20): 86-92, 194.
|
| 19 |
翟伟娜,葛运旺,宋书中.基于改进趋近律的机械手滑模控制[J].信息与控制,2014,43(3):300-305,313.
ZHAI W N, GE Y W, SONG S Z. Sliding mode control for robotic manipulators based on the improved reaching law[J]. Information and Control, 2014, 43(3): 300-305, 313.
|
| 20 |
孟思华,王尧尧,陈柏,等.基于时延估计的绳驱动飞行机械臂模糊非奇异终端滑模飞行控制[J].中南大学学报(自然科学版),2021,52(10):3465-3474. doi:10.11817/j.issn.1672-7207.2021.10.010
MENG S H, WANG Y Y, CHEN B, et al. Fuzzy nonsingular terminal sliding mode flying control of cabledriven flying manipulators based on time-delay estimation[J]. Journal of Central South University (Science and Technology), 2021, 52(10): 3465-3474.
doi: 10.11817/j.issn.1672-7207.2021.10.010
|
| 21 |
李正楠,张锦,殷玉枫,等.多关节机械臂的分数阶滑模变结构神经网络自适应控制[J].机械科学与技术,2021,40(2):270-275.
LI Z N, ZHANG J, YIN Y F, et al. Fractional sliding mode variable structure neural network adaptive control of multi-joint manipulator[J]. Mechanical Science and Technology for Aerospace Engineering, 2021, 40(2): 270-275.
|
| 22 |
JIA Q X, YUAN B N, CHEN G, et al. Adaptive fuzzy terminal sliding mode control for the free-floating space manipulator with free-swinging joint failure[J]. Chinese Journal of Aeronautics, 2021, 34(9): 178-198.
|
| 23 |
刘杰,历飞雨.基于弹性关节的二自由度机械臂建模与控制研究[J].机电工程,2022,39(6):846-853. doi:10.3969/j.issn.1001-4551.2022.06.019
LIU J, LI F Y. Modeling and control of 2-DOF robot arm based on elastic joint[J]. Journal of Mechanical & Electrical Engineering, 2022, 39(6): 846-853.
doi: 10.3969/j.issn.1001-4551.2022.06.019
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|