|
|
|
| Industrial robot de-redundant measurement and error compensation considering uncertainty |
Zexuan SI1,2( ),Jun ZHANG1,2,Yuting LIU1,2,He LV1,Shijie GUO1,2,*() ),Jun ZHANG1,2,Yuting LIU1,2,He LV1,Shijie GUO1,2,*() |
1. School of Mechanical Engineering, Inner Mongolia University of Technology, Hohhot 010051, China
2. Inner Mongolia Key Laboratory of Robotics and Intelligent Equipment Technology, Hohhot 010051, China |
|
|
|
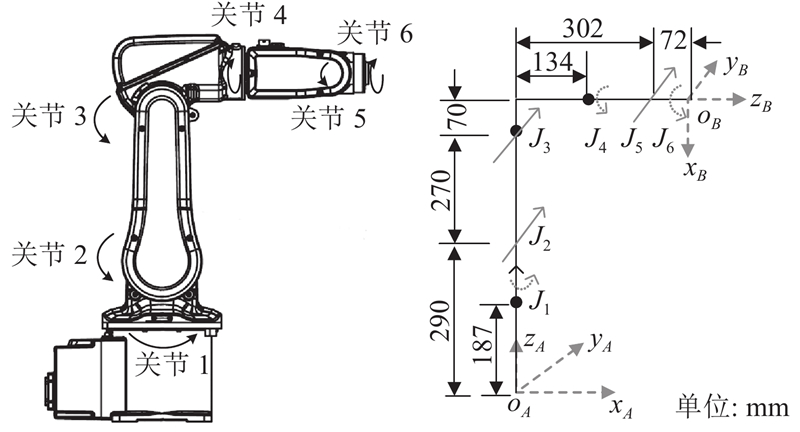
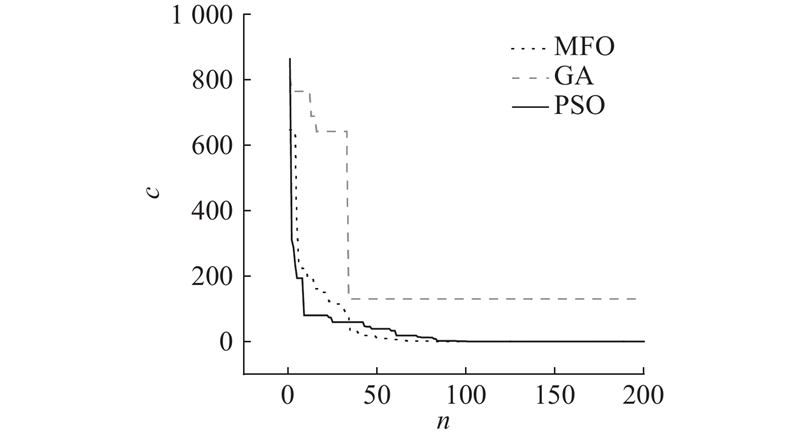
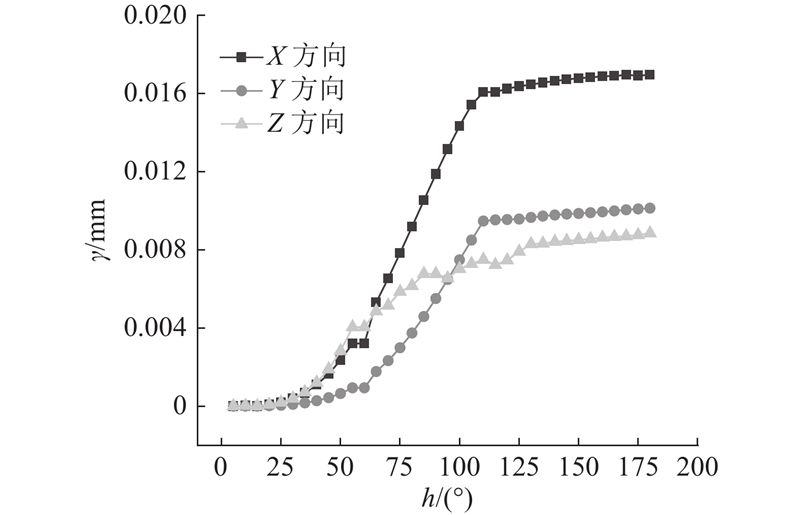
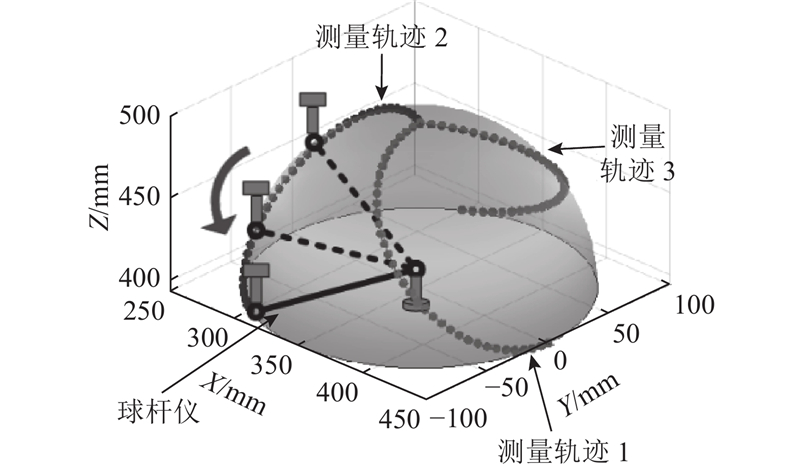
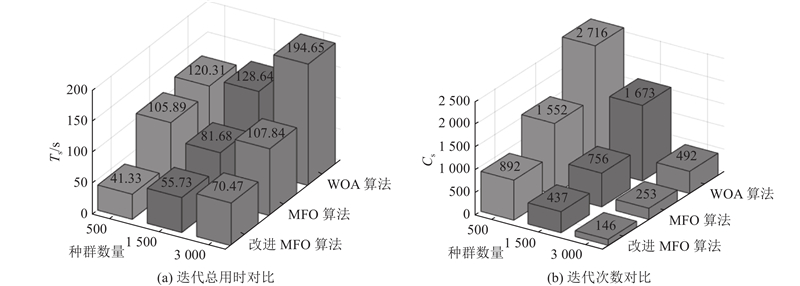
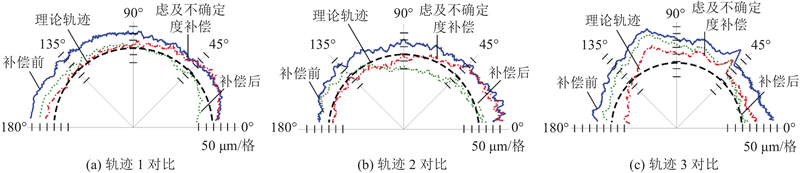
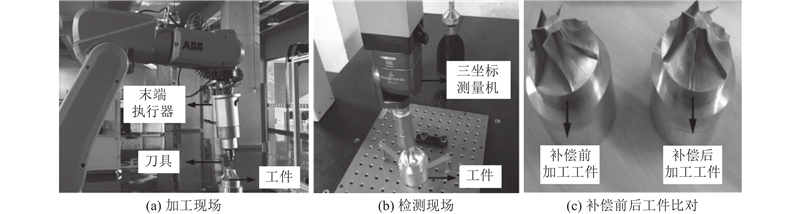
Abstract Problems in industrial robot kinematic calibration were addressed. These included measurement redundancy caused by positioning error similarity at sampling points, and kinematic parameter compensation affected by measurement uncertainty. A parameter calibration method combining de-redundant trajectory measurement and measurement uncertainty was proposed. Firstly, the spatial positioning error variation function was measured to characterize the Cartesian space similarity between the joint and the end effector, and a spatial de-redundant measurement trajectory for the ball bar instrument with multi-joint synchronous driving was constructed. Secondly, an improved moth-flame optimization algorithm (MFO) with enhanced encirclement and search strategy was developed to enhance the accuracy and efficiency of inverse kinematics and error parameter identification. Thirdly, a dynamic correction strategy for identification parameters based on measurement parameter uncertainty was formulated, and a nested optimization method for kinematic compensation parameters was established. Finally, the error compensation test results showed that based on the results of de-redundant measurement and identification, the accuracy of the robot was improved by 49.8% after error compensation without considering uncertainty, and by 53.5% after error compensation considering uncertainty. The processing test showed that after the error compensation considering the uncertainty, the size error of the impeller workpiece was reduced by 32.3% on average and the shape and position error was reduced by 38.9% on average, compared with the impeller workpiece processed before compensation.
|
|
Received: 10 December 2024
Published: 25 August 2025
|
|
|
| Fund: 国家自然科学基金资助项目(52365064,52365058);内蒙古关键技术攻关项目(2021GG0255);内蒙古自治区高等学校创新团队发展计划支持项目(NMGIRT2213);内蒙古自治区直属高校基本科研业务费项目(ZTY2023005,JY20230043);内蒙古自治区高等学校青年科技英才支持计划项目(NJYT23043);内蒙古自然科学基金资助项目(2023LHMS05018,2023LHMS05017);内蒙古自治区“英才兴蒙”工程团队项目(2025TEL02). |
|
Corresponding Authors:
Shijie GUO
E-mail: 1075385743@qq.com;sjguo@imut.edu.cn
|
工业机器人去冗余测量与考虑不确定度的误差补偿
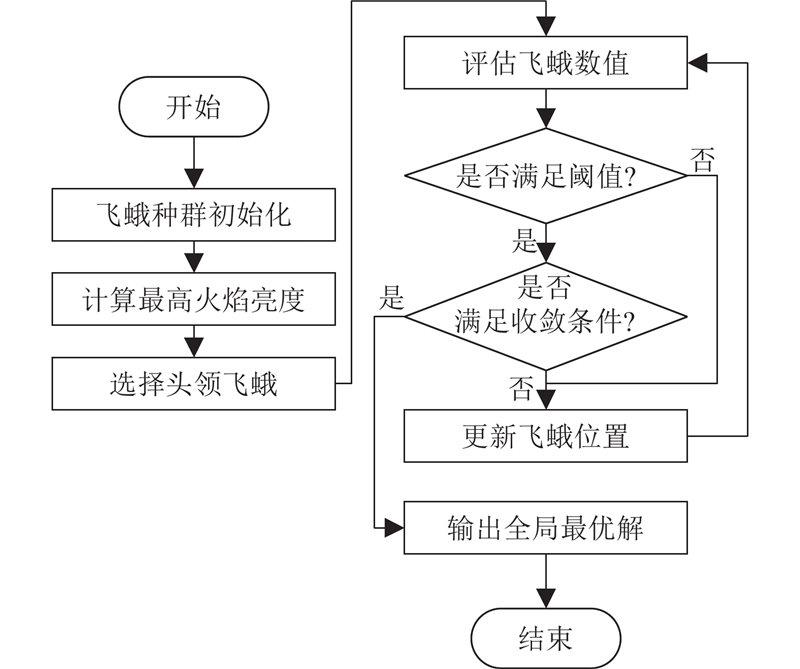
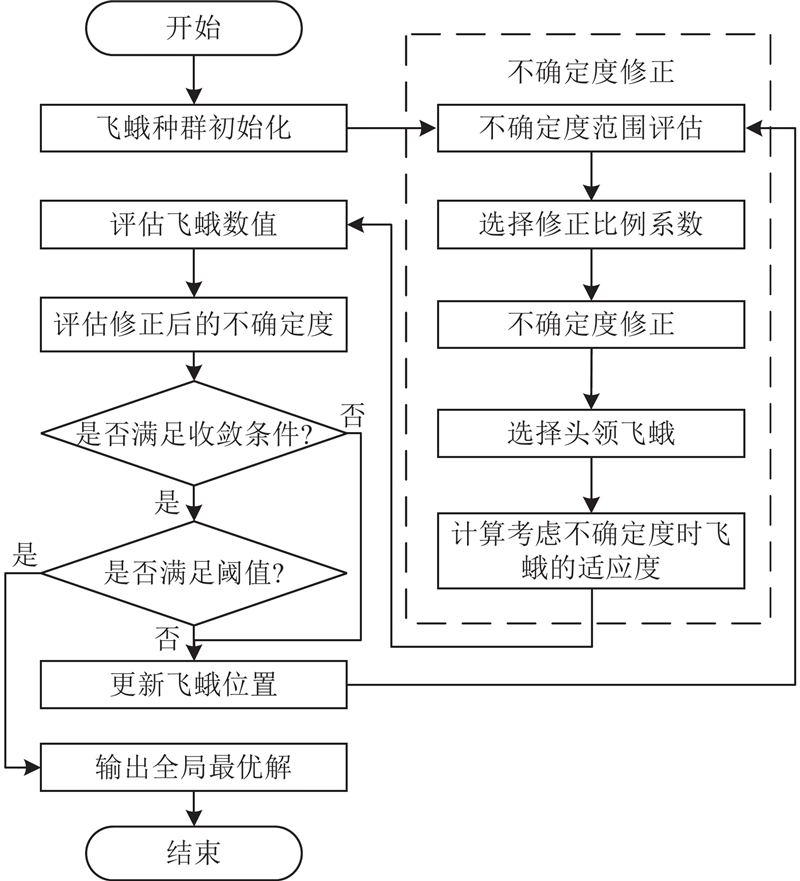
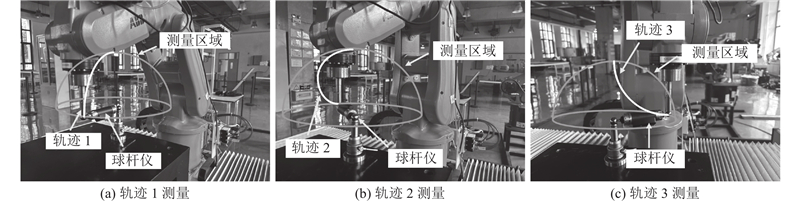
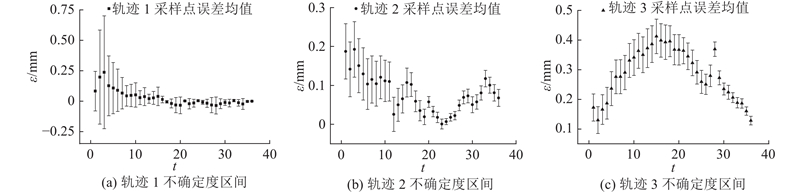
针对工业机器人运动学标定过程中采样点定位误差相似性导致的测量冗余、运动学参数补偿受测量不确定性影响的问题,提出去冗余轨迹测量与虑及测量不确定度的参数校准方法. 通过测量空间定位误差变差函数进行关节-末端执行器笛卡尔空间相似性表征,构建多关节同步驱动的球杆仪空间去冗余测量轨迹;构建包围与搜索策略改进的飞蛾火焰优化算法(MFO),以提升运动学逆解及误差参数辨识的精度与效率;建立基于测量参数不确定度的辨识参数动态修正策略,构建运动学补偿参数嵌套寻优方法. 误差补偿试验结果表明,基于去冗余测量与辨识结果,进行未考虑不确定度的误差补偿后,机器人定位精度提升49.83%,进行考虑不确定度的误差补偿后,相对于补偿前,机器人定位精度提升53.47%. 加工试验表明,进行考虑不确定度的误差补偿后,所加工叶轮工件相较于补偿前加工的叶轮工件,尺寸误差平均减小32.3%,形位误差平均减小38.9%.
关键词:
工业机器人,
去冗余测量,
参数辨识,
测量不确定度,
误差补偿
|
|
| [1] |
周炜, 廖文和, 田威, 等 基于粒子群优化神经网络的机器人精度补偿方法研究[J]. 中国机械工程, 2013, 24 (2): 174- 179
ZHOU Wei, LIAO Wenhe, TIAN Wei, et al Method of industrial robot accuracy compensation based on particle swarm optimization neural network[J]. China Mechanical Engineering, 2013, 24 (2): 174- 179
doi: 10.3969/j.issn.1004-132X.2013.02.007
|
|
|
| [2] |
JUDD R P, KNASINSKI A B A technique to calibrate industrial robots with experimental verification[J]. IEEE Transactions on Robotics and Automation, 1990, 6 (1): 20- 30
doi: 10.1109/70.88114
|
|
|
| [3] |
VEITSCHEGGER W, WU C H Robot accuracy analysis based on kinematics[J]. IEEE Journal on Robotics and Automation, 1986, 2 (3): 171- 179
doi: 10.1109/JRA.1986.1087054
|
|
|
| [4] |
WU Y, KLIMCHIK A, CARO S, et al Geometric calibration of industrial robots using enhanced partial pose measurements and design of experiments[J]. Robotics and Computer-Integrated Manufacturing, 2015, 35: 151- 168
doi: 10.1016/j.rcim.2015.03.007
|
|
|
| [5] |
ALAM M, IBARAKI S, FUKUDA K Kinematic modeling of six-axis industrial robot and its parameter identification: a tutorial[J]. International Journal of Automation Technology, 2021, 15 (5): 599- 610
doi: 10.20965/ijat.2021.p0599
|
|
|
| [6] |
LIAN B Geometric error modeling of parallel manipulators based on conformal geometric algebra[J]. Advances in Applied Clifford Algebras, 2018, 28 (1): 30
doi: 10.1007/s00006-018-0831-5
|
|
|
| [7] |
CHEN G, LI T, CHU M, et al Review on kinematics calibration technology of serial robots[J]. International Journal of Precision Engineering and Manufacturing, 2014, 15 (8): 1759- 1774
doi: 10.1007/s12541-014-0528-1
|
|
|
| [8] |
乔贵方, 杜宝安, 张颖, 等 基于POE模型的工业机器人运动学参数二次辨识方法研究[J]. 农业机械学报, 2024, 55 (1): 419- 425
QIAO Guifang, DU Baoan, ZHANG Ying, et al Quadratic identification method of kinematic parameters of industrial robots based on POE model[J]. Transactions of the Chinese Society for Agricultural Machinery, 2024, 55 (1): 419- 425
doi: 10.6041/j.issn.1000-1298.2024.01.040
|
|
|
| [9] |
LONG P, KHALIL W, CARO S Kinematic and dynamic analysis of lower-mobility cooperative arms[J]. Robotica, 2015, 33 (9): 1813- 1834
doi: 10.1017/S0263574714001039
|
|
|
| [10] |
HE J, GU L, YANG G, et al A local POE-based self-calibration method using position and distance constraints for collaborative robots[J]. Robotics and Computer-Integrated Manufacturing, 2024, 86: 102685
doi: 10.1016/j.rcim.2023.102685
|
|
|
| [11] |
CHEN G L, KONG L Y, LI Q C, et al Complete, minimal and continuous error models for the kinematic calibration of parallel manipulators based on POE formula[J]. Mechanism and Machine Theory, 2018, 121: 844- 856
doi: 10.1016/j.mechmachtheory.2017.11.003
|
|
|
| [12] |
WU L, YANG X D, CHEN K, et al A minimal POE-based model for robotic kinematic calibration with only position measurements[J]. IEEE Transactions on Automation Science and Engineering, 2015, 12 (2): 758- 763
doi: 10.1109/TASE.2014.2328652
|
|
|
| [13] |
LIU Y, LI Y W, ZHUANG Z G, et al Improvement of robot accuracy with an optical tracking system[J]. Sensors, 2020, 20 (21): 6341
doi: 10.3390/s20216341
|
|
|
| [14] |
WANG Z, ZHANG R, KEOGH P Real-time laser tracker compensation of robotic drilling and machining[J]. Journal of Manufacturing and Materials Processing, 2020, 4 (3): 79
doi: 10.3390/jmmp4030079
|
|
|
| [15] |
NUBIOLA A, SLAMANI M, BONEV I A A new method for measuring a large set of poses with a single telescoping ballbar[J]. Precision Engineering, 2013, 37 (2): 451- 460
doi: 10.1016/j.precisioneng.2012.12.001
|
|
|
| [16] |
FERRARINI S, BILANCIA P, RAFFAELI R, et al A method for the assessment and compensation of positioning errors in industrial robots[J]. Robotics and Computer-Integrated Manufacturing, 2024, 85: 102622
doi: 10.1016/j.rcim.2023.102622
|
|
|
| [17] |
黄鹏, 王青, 李江雄, 等 激光跟踪仪三维坐标转换综合优化方法[J]. 计算机集成制造系统, 2015, 21 (11): 2912- 2920
HUANG Peng, WANG Qing, LI Jiangxiong, et al Comprehensive optimization for three-dimensional coordinate transformation of laser tracker[J]. Computer Integrated Manufacturing Systems, 2015, 21 (11): 2912- 2920
|
|
|
| [18] |
JIANG X, ZHANG D, WANG H Positioning error calibration of six-axis robot based on sub-identification space[J]. The International Journal of Advanced Manufacturing Technology, 2024, 130 (11): 5693- 5707
|
|
|
| [19] |
赵业和, 刘达新, 刘振宇, 等 基于多种群竞争松鼠搜索算法的机械臂时间最优轨迹规划[J]. 浙江大学学报: 工学版, 2022, 56 (12): 2321- 2329,2402
ZHAO Yehe, LIU Daxin, LIU Zhenyu, et al Time-optimal trajectory planning of manipulator based on multi-group competition squirrel search algorithm[J]. Journal of Zhejiang University: Engineering Science, 2022, 56 (12): 2321- 2329,2402
|
|
|
| [20] |
LUO G, ZOU L, WANG Z, et al A novel kinematic parameters calibration method for industrial robot based on Levenberg-Marquardt and differential evolution hybrid algorithm[J]. Robotics and Computer-Integrated Manufacturing, 2021, 71: 102165
doi: 10.1016/j.rcim.2021.102165
|
|
|
| [21] |
ZHU Q D, XIE X R, LI C, et al Kinematic self-calibration method for dual-manipulators based on optical axis constraint[J]. IEEE Access, 2018, 7: 7768- 7782
|
|
|
| [22] |
CAO H Q, NGUYEN H X, TRAN T N, et al A robot calibration method using a neural network based on a butterfly and flower pollination algorithm[J]. IEEE Transactions on Industrial Electronics, 2022, 69 (4): 3865- 3875
doi: 10.1109/TIE.2021.3073312
|
|
|
| [23] |
ZHAO J, ZHU X J, SONG T J Serial manipulator time-jerk optimal trajectory planning based on hybrid IWOA-PSO algorithm[J]. IEEE Access, 2022, 10: 6592- 6604
doi: 10.1109/ACCESS.2022.3141448
|
|
|
| [24] |
ZHANG L H, WANG Y, ZHAO X Y, et al Time-optimal trajectory planning of serial manipulator based on adaptive cuckoo search algorithm[J]. Journal of Mechanical Science and Technology, 2021, 35 (7): 3171- 3181
doi: 10.1007/s12206-021-0638-5
|
|
|
| [25] |
LI B, TIAN W, ZHANG C F, et al Positioning error compensation of an industrial robot using neural networks and experimental study[J]. Chinese Journal of Aeronautics, 2022, 35 (2): 346- 360
doi: 10.1016/j.cja.2021.03.027
|
|
|
| [26] |
LI R, DING N, ZHAO Y, et al Real-time trajectory position error compensation technology of industrial robot[J]. Measurement, 2023, 208: 112418
doi: 10.1016/j.measurement.2022.112418
|
|
|
| [27] |
张泽坤, 国凯, 孙杰 基于扰动观测器的工业机器人高精度闭环鲁棒控制[J]. 机械工程学报, 2022, 58 (14): 62- 70
ZHANG Zekun, GUO Kai, SUN Jie High-precision closed-loop robust control of industrial robots based on disturbance observer[J]. Journal of Mechanical Engineering, 2022, 58 (14): 62- 70
doi: 10.3901/JME.2022.14.062
|
|
|
| [28] |
ZHANG L, TIAN W, ZHENG F, et al Accuracy compensation technology of closed-loop feedback of industrial robot joints[J]. Transactions of Nanjing University of Aeronautics and Astronautics, 2020, 37 (6): 858- 871
|
|
|
| [29] |
ZHANG T, SONG Y T, WU H P, et al A novel method to identify DH parameters of the rigid serial-link robot based on a geometry model[J]. Industrial Robot: the International Journal of Robotics Research and Application, 2021, 48 (1): 157- 167
doi: 10.1108/IR-05-2020-0103
|
|
|
| [30] |
REN J, JI X X, LI J H, et al A kinematic modeling scheme of three-axis “Satcom-on-the-Move” antenna based on modified Denavit-Hartenberg method[J]. Journal of Northwestern Polytechnical University, 2023, 41 (3): 518- 528
doi: 10.1051/jnwpu/20234130518
|
|
|
| [31] |
WANG Y, DONG M J, ZUO G Y, et al POE-based error modeling and multiple plane constraint-based parameter identification for the kinematic calibration of a 4-UPS/SPR parallel external fixator[J]. Applied Mathematical Modelling, 2024, 133: 394- 413
doi: 10.1016/j.apm.2024.05.031
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|