|
|
|
| Precise control of translational motion electro-hydraulic system of intelligent shield segment assembly machine |
Xuyang CHEN1( ),Xin HUANG1,Junke GUO2,Fulong LIN2,Lianhui JIA2,Guofang GONG1,Huayong YANG1,Yi ZHU1,*() ),Xin HUANG1,Junke GUO2,Fulong LIN2,Lianhui JIA2,Guofang GONG1,Huayong YANG1,Yi ZHU1,*() |
1. State Key Laboratory of Fluid Power and Mechatronic Systems, Zhejiang University, Hangzhou 310027, China
2. Electrical and Intelligent Technology Research Institute, China Railway Engineering Equipment Group Co. Ltd, Zhengzhou 450047, China |
|
|
|
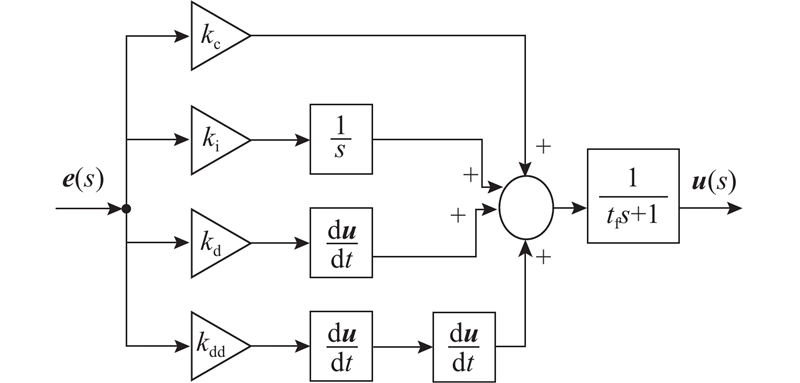
Abstract Aiming at the problem of heavy load, large hysteresis and large friction disturbance of segment assembly machine, the precise control of hydraulic translation systems under friction disturbances was addressed through accurate model identification and the implementation of the iPIDD2 algorithm, to improve the accuracy and efficiency of automatic segment assembly. Initially, a signal preprocessing method combining multiple algorithms for noise reduction was proposed based on the theoretical model to preprocess the output signal. Subsequently, a deviation-compensating recursive least squares identification algorithm with a forgetting factor was adopted to obtain a more accurate hydraulic system model. To achieve precise control of the translational motion of the assembly machine under friction disturbances, the iPIDD2 control algorithm was proposed to achieve precise control of the translation cylinder. The research results were validated through AMESim-Simulink co-simulation and the construction of an electro-hydraulic servo system experimental platform with real-time control systems. Full-scale experimental verification was conducted under different load conditions. Results showed that compared with PID, this method had better precise control performance and smaller hysteresis time under parameter uncertainty and friction disturbance. The displacement tracking of this method was stable. The state error was less than 3 mm, which was 77.6% smaller than the maximum tracking error of PID control, and the hysteresis time was reduced by more than 10 s. This method held significant potential for improving the assembly precision and efficiency of automatic shield segment assembly under friction disturbances.
|
|
Received: 01 January 2024
Published: 10 March 2025
|
|
|
| Fund: 国家自然科学基金优秀青年基金资助项目(52222503);浙江省自然科学基金重大资助项目(LD22E050003);国家重点研发计划资助项目(2022YFB4602502). |
|
Corresponding Authors:
Yi ZHU
E-mail: 352206277@qq.com;yiz@zju.edu.cn
|
盾构智能管片拼装机的平移运动电液系统精确控制
管片拼装机载荷大、滞后大、摩擦扰动大,为了提高管片自动拼装的精度和效率,通过对模型精确辨识和iPIDD2算法实现在摩擦扰动下液压平移系统的精确控制. 在理论模型基础上,提出多算法融合信号降噪方法对输出信号进行预处理,并采用带遗忘因子的偏差补偿递推最小二乘辨识算法,以获得更精确的液压系统模型. 针对摩擦扰动下拼装机平移运动的精确控制,提出iPIDD2控制算法实现平移油缸的精确控制. 通过AMESim-Simulink联合仿真和搭建电液伺服系统实验台及实时控制系统验证研究结果. 在不同的负载工况下进行全尺寸实验验证,结果表明,所提方法的位移跟踪稳态误差小于3 mm,与PID相比最大跟踪误差减小77.6%,迟滞时间减少超过10 s. 在参数不确定和摩擦扰动下具有更好的精确控制性能和更小的迟滞时间,所提算法对提高摩擦扰动下自动管片拼装的拼装精度和效率具有积极意义.
关键词:
盾构机,
管片拼装,
信号处理,
参数识别,
精确控制
|
|
| [1] |
CHEN X, WANG L, CAI J, et al. Autonomous recognition and positioning of shield segments based on red, green, blue and depth information[J]. Automation in Construction , 2023, 146.
|
|
|
| [2] |
王林涛. 盾构掘进姿态控制关键技术研究[D]. 浙江大学, 2014.
WANG Lintao. Research on key technologies for attitude control of shield tunneling machine [D]. Hangzhou: Zhejiang University, 2014.
|
|
|
| [3] |
LU J Y, GU C F, ZHAO Y J, et al Refined modeling method and analysis of an electromagnetic direct-drive hydrostatic actuation system[J]. Actuators, 2022, 11 (10): 281
|
|
|
| [4] |
SHI B F, XIONG L, YU Z P Master cylinder pressure estimation of the electro-hydraulic brake system based on modeling and fusion of the friction character and the pressure-position character[J]. IEEE Transactions on Vehicular Technology, 2023, 72 (2): 1748- 1762
doi: 10.1109/TVT.2022.3213599
|
|
|
| [5] |
DAGDELEN M, SARIGEC, ILI M I Automation of friction torque identification for vane-type semi-rotary pneumatic actuators[J]. Journal of the Brazilian Society of Mechanical Sciences and Engineering, 2023, 45 (6): 340
|
|
|
| [6] |
ZHANG Y M, LI K M, CAI M L, et al Establishment and experimental verification of a nonlinear position servo system model for a magnetically coupled rodless cylinder[J]. Actuators, 2022, 11 (2): 50
|
|
|
| [7] |
FENG H, QIAO W H, YIN C B, et al Identification and compensation of non-linear friction for a electro-hydraulic system[J]. Mechanism and Machine Theory, 2019, 141: 1- 13
doi: 10.1016/j.mechmachtheory.2019.07.004
|
|
|
| [8] |
JI Y, ZHANG J Z, HE C K, et al Constraint performance pressure tracking control with asymmetric continuous friction compensation for booster based brake-by-wire system[J]. Mechanical Systems and Signal Processing, 2022, 174: 109083
|
|
|
| [9] |
JIANG S L, ZHANG K, WANG H, et al Research on adaptive friction compensation of digital hydraulic cylinder based on LuGre friction model[J]. Shock and Vibration, 2021, 1 (1): 8854424
|
|
|
| [10] |
SARKAR A, MAJI K, CHAUDHURI S, et al Actuation of an electrohydraulic manipulator with a novel feedforward compensation scheme and PID feedback in servo-proportional valves[J]. Control Engineering Practice, 2023, 135: 105490
|
|
|
| [11] |
IDIR A, BENSAFIA Y, KHETTAB K, et al Performance improvement of aircraft pitch angle control using a new reduced order fractionalized PID controller[J]. Asian Journal of Control, 2023, 25 (4): 2588- 2603
doi: 10.1002/asjc.3009
|
|
|
| [12] |
DO T C, TRAN D T, AHN K K. Fractional order fuzzy PID controller for an electro-hydraulic rotary actuator [C]// Proceedings of the 23rd International Conference on Mechatronics Technology . Salerno: IEEE, 2019: 23−26.
|
|
|
| [13] |
CAN Ö, ANDIC C, EKINCI S, et al Enhancing transient response performance of automatic voltage regulator system by using a novel control design strategy[J]. Electrical Engineering, 2023, 105 (4): 1993- 2005
doi: 10.1007/s00202-023-01777-8
|
|
|
| [14] |
KUMAR A, ANWAR M N Decentralized load-frequency controller design for a single as well as multi-area power system[J]. Iranian Journal of Science and Technology: Transactions of Electrical Engineering, 2020, 44 (1): 309- 326
doi: 10.1007/s40998-019-00246-y
|
|
|
| [15] |
COSKUN M Y, ITIK M Intelligent PID control of an industrial electro-hydraulic system[J]. ISA Transactions, 2023, 139: 484- 498
doi: 10.1016/j.isatra.2023.04.005
|
|
|
| [16] |
BINGUL Z, GUL K Intelligent-PID with PD feedforward trajectory tracking control of an autonomous underwater vehicle[J]. Machines, 2023, 11 (2): 300
|
|
|
| [17] |
ÖNEN Ü Model-free controller design for nonlinear underactuated systems with uncertainties and disturbances by using extended state observer based chattering-free sliding mode control[J]. IEEE Access, 2023, 11: 2875- 2885
doi: 10.1109/ACCESS.2023.3234864
|
|
|
| [18] |
LIU T Research on stability of hydraulic system based on nonlinear PID control[J]. Nonlinear Engineering Modeling and Application, 2022, 11 (1): 494- 499
doi: 10.1515/nleng-2022-0222
|
|
|
| [19] |
ZHAO M C, WANG Q W, WANG Y W, et al Multi-motor cooperative control strategy for speed synchronous control of construction platform[J]. Electronics, 2022, 11 (24): 4162
|
|
|
| [20] |
ZENG X L, WANG W Q, WANG H Y Adaptive PI and RBFNN PID current decoupling controller for permanent magnet synchronous motor drives: hardware-validated results[J]. Energies, 2022, 15 (17): 6353
|
|
|
| [21] |
陈旭阳, 韩振南, 宁少慧 自适应改进双树复小波变换的齿轮箱故障诊断[J]. 振动, 测试与诊断, 2019, 39 (5): 1016- 1022
CHEN Xuyang, HAN Zhennan, NING Shaohui Gearbox fault diagnosis based on adaptive modified dual-tree complex wavelet transform[J]. Vibration, testing and diagnosis, 2019, 39 (5): 1016- 1022
|
|
|
| [22] |
陈旭阳, 韩振南, 王志坚 改进双树复小波变换和高阶累积量的齿轮箱信号降噪方法[J]. 太原理工大学学报, 2018, 49 (6): 813- 819
CHEN Xuyang, HAN Zhennan, WANG Zhijian Gearbox signal denoising method based on improved double tree complex wavelet transform and higher order cumulant[J]. Journal of Taiyuan University of Technology, 2018, 49 (6): 813- 819
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|