|
|
|
| Modified Bouc-Wen based hysteresis modeling of flexible joint actuator |
Ming XU( ),Di ZHANG,Cheng RONG,Li-rong SU,Wan-qiang WANG*() ),Di ZHANG,Cheng RONG,Li-rong SU,Wan-qiang WANG*() |
| School of Mechanical Engineering, Hangzhou Dianzi University, Hangzhou 310018, China |
|
|
|
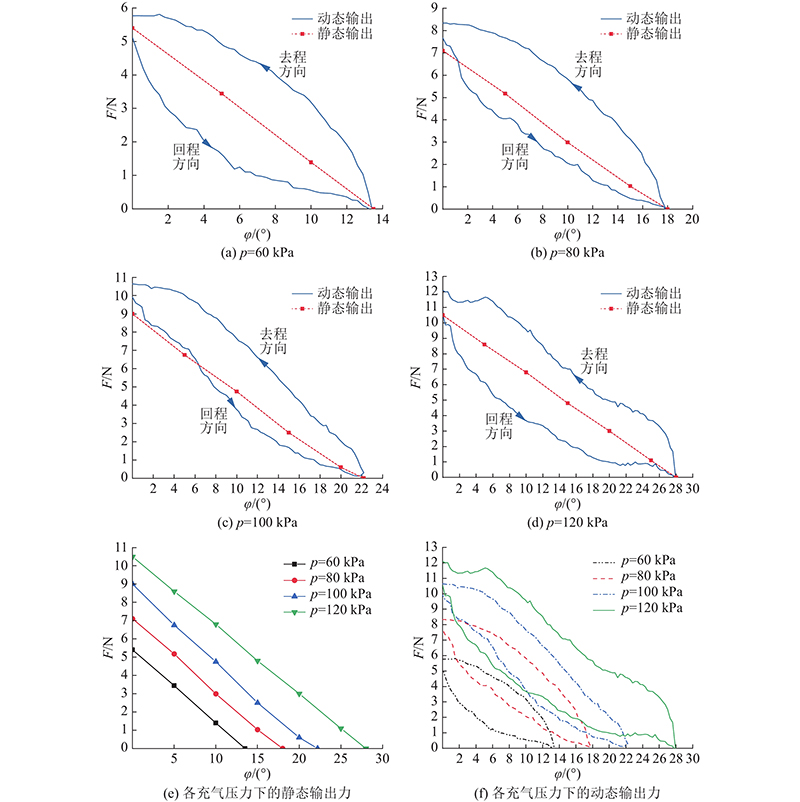
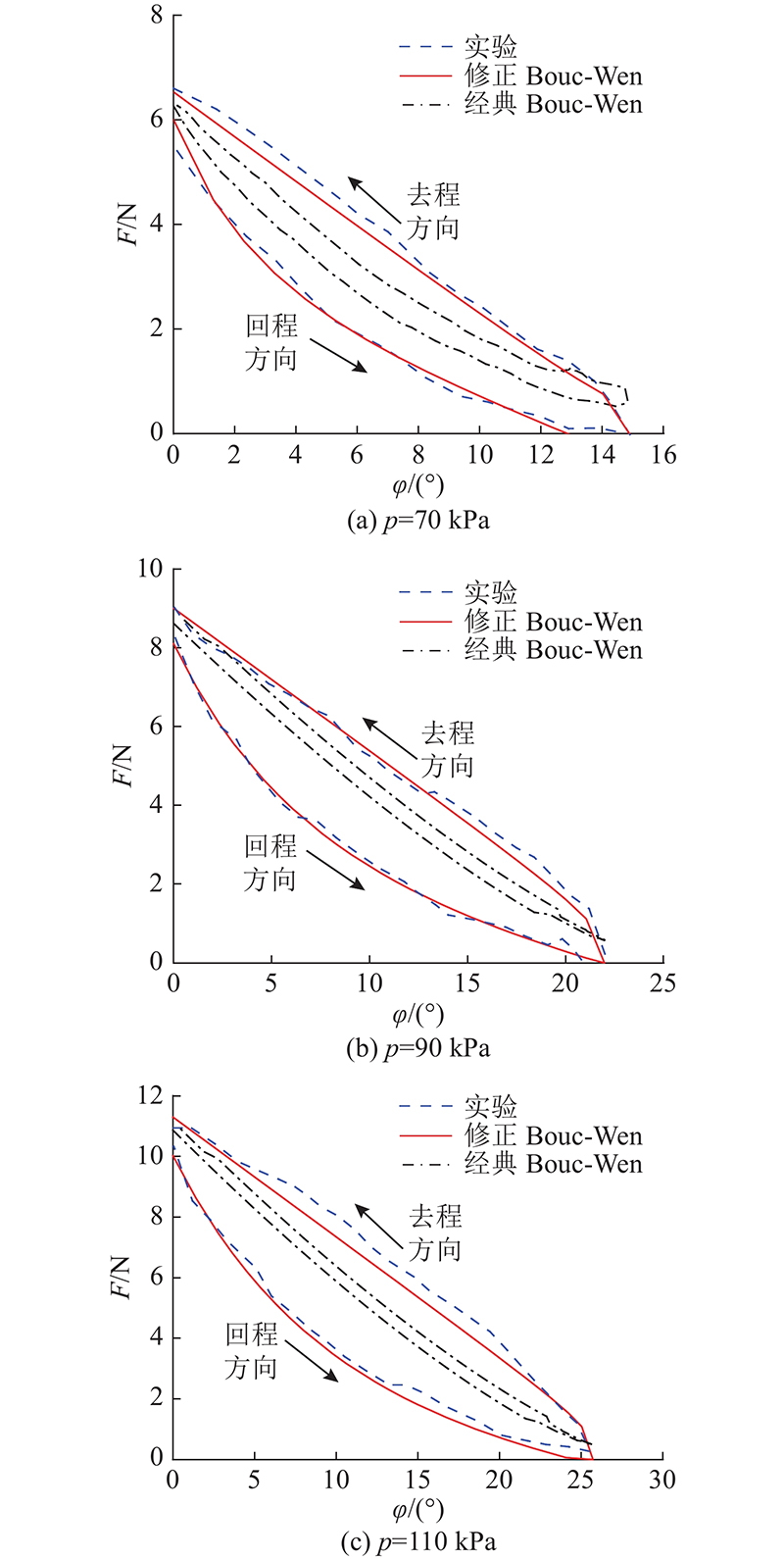
Abstract A hysteresis test bench for flexible joint driving force was constructed, in order to study the force hysteresis characteristic of the flexible joint actuator and improve the force control accuracy. The modified Bouc-Wen method was proposed to accurately model the force hysteresis of the joint actuator, and the parameters of the modified Bouc-Wen model were identified by the Runge-Kutta-Fehlberg method. On the basis of the conventional Bouc-Wen model, a directional correction term was introduced to overcome the asymmetry of the output force-angle hysteresis of the flexible joint actuator. The modified Bouc-Wen model was established, using the experimental data of force hysteresis of joint actuator at 60, 80, 100 and 120 kPa inflation pressure. The hysteresis curve predicted by the proposed Bouc-Wen model was compared with that of the conventional Bouc-Wen and the experimental curve at 70, 90 and 110 kPa inflation pressure. Experimental results show that the maximum relative error of the proposed Bouc-Wen based force hysteresis model for the flexible joint actuator under each inflation pressure was only 7.75%, the average deviation remained within 0.45 N, and the fitting goodness of the model was more than 0.99. Results show that the proposed modified Bouc-Wen model can accurately describe the force hysteresis of the flexible joint actuator, which lays a foundation for the force closed-loop control and also provides a promising method for the hysteresis modeling of other hyperelastic flexible actuators.
|
|
Received: 12 February 2022
Published: 30 August 2022
|
|
|
| Fund: 国家自然科学基金资助项目(51975171);浙江省教育厅一般科研项目(专业学位研究生培养模式改革专项)资助项目(Y202146881) |
|
Corresponding Authors:
Wan-qiang WANG
E-mail: jxxuming@hdu.edu.cn;wwq@hdu.edu.cn
|
基于Bouc-Wen修正模型的柔性关节驱动器迟滞建模
为了研究柔性关节驱动器输出力的迟滞影响,提高力控制精度,构建了柔性关节驱动力的迟滞实验台,提出柔性关节驱动器输出力的Bouc-Wen修正方法对力迟滞进行精确建模,并通过龙格-库塔-费尔贝格算法对Bouc-Wen修正模型进行参数辨识. 在Bouc-Wen模型的基础上,引入具有方向性的修正项,克服柔性关节驱动器的输出力-转角迟滞的非对称性. 利用关节驱动器在60、80、100、120 kPa充气压力下的力迟滞实验数据,建立Bouc-Wen修正模型. 在70、90、110 kPa充气压力下,将Bouc-Wen修正模型所预测的柔性关节力迟滞曲线与经典Bouc-Wen模型以及实验曲线进行对比. 结果表明所提出的力迟滞Bouc-Wen修正模型,在各充气压力下的最大相对误差仅为7.75%,平均偏差小于0.45 N,模型拟合优度大于0.99. 说明所提出的Bouc-Wen修正模型能够对柔性关节驱动器的力迟滞进行准确建模,为力闭环控制提供基础,也为其他超弹性材料柔性驱动器的迟滞建模提供参考方法.
关键词:
柔性关节驱动器,
迟滞建模,
Bouc-Wen修正模型,
软体机器人,
参数辨识
|
|
| [1] |
LI G R, CHEN X P, ZHOU F H, et al Self-powered soft robot in the Mariana Trench[J]. Nature, 2021, 591 (7848): 66- 71
doi: 10.1038/s41586-020-03153-z
|
|
|
| [2] |
管清华, 孙健, 刘彦菊, 等 气动软体机器人发展现状与趋势[J]. 中国科学:技术科学, 2020, 50 (7): 897- 934
GUAN Qing-hua, SUN Jian, LIU Yan-ju, et al Status of and trends in soft pneumatic robotics[J]. Scientia Sinica Technologica, 2020, 50 (7): 897- 934
|
|
|
| [3] |
CHEN Y H, CHUNG O A, CHEN B, et al A lobster-inspired bending module for compliant robotic applications[J]. Bioinspiration and Biomimetics, 2020, 15 (5): 056009
doi: 10.1088/1748-3190/ab9c8d
|
|
|
| [4] |
YE X, ZHU S D, QIAN X, et al. V-shape pneumatictorsional actuator: a building block for soft grasper and manipulator [J/OL]. (2021-6-24). https://www.liebertpub.com/doi/10.1089/soro.2020.0128.
|
|
|
| [5] |
PAEZ L, AGARWAL G, PAIK J Design and analysis of a soft pneumatic actuator with origami shell reinforcement[J]. Soft Robotics, 2016, 3 (3): 109- 119
doi: 10.1089/soro.2016.0023
|
|
|
| [6] |
LI M, PAL A, AGHAKHANI A, et al Soft actuators for real-world applications[J]. Nature Reviews Materials, 2022, 7 (3): 235- 249
doi: 10.1038/s41578-021-00389-7
|
|
|
| [7] |
ZHOU L, REN L L, CHEN Y Bio-inspired soft grippers based on impactive gripping[J]. Advanced Science, 2021, 8 (9): 2002017
doi: 10.1002/advs.202002017
|
|
|
| [8] |
郝天泽, 肖华平, 刘书海, 等 集成化智能软体机器人研究进展[J]. 浙江大学学报:工学版, 2021, 55 (2): 229- 243
HAO Tian-ze, XIAO Hua-ping, LIU Shu-hai, et al Research status of integrated intelligent soft robots[J]. Journal of Zhejiang University: Engineering Science, 2021, 55 (2): 229- 243
|
|
|
| [9] |
徐彦, 方琴, 张超, 等 气动软体自折叠机械臂的驱动和负载性能[J]. 浙江大学学报:工学版, 2020, 54 (2): 398- 406
XU Yan, FANG Qin, ZHANG Chao, et al Driving and load performance of pneumatic soft self-folding manipulator[J]. Journal of Zhejiang University: Engineering Science, 2020, 54 (2): 398- 406
|
|
|
| [10] |
ZOU J, GU G Y Modeling the viscoelastic hysteresis of dielectric elastomer actuators with a modified rate-dependent Prandtl-Ishlinskii model[J]. Polymers, 2018, 10 (5): 525
doi: 10.3390/polym10050525
|
|
|
| [11] |
KONDA R, ZHANG J Hysteresis with lonely stroke in artificial muscles: characterization, modeling, and inverse compensation[J]. Mechanical Systems and Signal Processing, 2022, 164: 108240
doi: 10.1016/j.ymssp.2021.108240
|
|
|
| [12] |
HASSANI V, TJAHJOWIDODO T, DO T N A survey on hysteresis modeling, identification and control[J]. Mechanical Systems and Signal Processing, 2014, 49 (1/2): 209- 233
|
|
|
| [13] |
CUI R G, LI S H, WANG Z, et al A modified residual stress dependent Jile-Atherton hysteresis model[J]. Journal of Magnetism and Magnetic Materials, 2018, 465: 578- 584
doi: 10.1016/j.jmmm.2018.06.021
|
|
|
| [14] |
SHAO B, CHEN B, CAO Y, et al Nonlinear tensile behavior of cotton fabric reinforced polypropylene composites[J]. Journal of Applied Polymer Science, 2020, 138 (5): 49780
|
|
|
| [15] |
李梦梦, 李原, 王庆林 EAP柔性智能驱动材料的建模、控制及应用研究进展[J]. 机器人, 2018, 40 (5): 660- 672
LI Meng-meng, LI Yuan, WANG Qing-lin Research progress on modeling, control and application of EAP flexible intelligent driving materials[J]. Robot, 2018, 40 (5): 660- 672
doi: 10.13973/j.cnki.robot.180210
|
|
|
| [16] |
THAI M T, PHAN P T, HOANG T T, et al Design, fabrication, and hysteresis modeling of soft microtubule artificial muscle (SMAM) for medical applications[J]. IEEE Robotics and Automation Letters, 2021, 6 (3): 5089- 5096
doi: 10.1109/LRA.2021.3072599
|
|
|
| [17] |
HEPP J, BADRI-SPRÖWITZ A. A novel spider-inspired rotary-rolling diaphragm actuator with linear torque characteristic and high mechanical efficiency [J/OL]. (2021-6-21). https://www.liebertpub.com/doi/full/10.1089/soro.2020.0108.
|
|
|
| [18] |
KELLARIS N, ROTHEMUND P, ZENG Y, et al Spider-inspired electrohydraulic actuators for fast, soft-actuated joints[J]. Advanced Science, 2021, 8 (14): 2100916
doi: 10.1002/advs.202100916
|
|
|
| [19] |
GÖTTLER C, AMADOR G, VAN D K T, et al Fluid mechanics and rheology of the jumping spider body fluid[J]. Soft Matter, 2021, 17 (22): 5532- 5539
doi: 10.1039/D1SM00338K
|
|
|
| [20] |
XU M, RONG C, HE L Design and modeling of a bio-inspired flexible joint actuator[J]. Actuators, 2021, 10 (5): 95
doi: 10.3390/act10050095
|
|
|
| [21] |
CHEN S E, CAO Y T, SARPARAST M, et al Soft crawling robots: design, actuation, and locomotion[J]. Advanced Materials Technologies, 2020, 5 (2): 1900837
doi: 10.1002/admt.201900837
|
|
|
| [22] |
LIN C J, LIN C R, YU S K, et al Hysteresis modeling and tracking control for a dual pneumatic artificial muscle system using Prandtl-Ishlinskii model[J]. Mechatronics, 2015, 28: 35- 45
doi: 10.1016/j.mechatronics.2015.03.006
|
|
|
| [23] |
ZHANG Q, DONG Y, PENG Y, et al Asymmetric Bouc-Wen hysteresis modeling and inverse compensation for piezoelectric actuator via a genetic algorithm-based particle swarm optimization identification algorithm[J]. Journal of Intelligent Material Systems and Structures, 2019, 30 (8): 1263- 1275
doi: 10.1177/1045389X19831360
|
|
|
| [24] |
PAUL S, MONDAL S P, BHATTACHARYA P Numerical solution of LotkaVolterra prey predator model by using Runge-Kutta-Fehlberg method and Laplace Adomian decomposition method[J]. Alexandria Engineering Journal, 2016, 55 (1): 613- 617
doi: 10.1016/j.aej.2015.12.026
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|