| Automatic Technology, Computer Technology |
|


|
|
|
| Research and application of iterative learning control with knowledge inheritance |
Chen-yang PU( ),Zuo-jun LIU*(),Shuang PANG,Yan ZHANG ),Zuo-jun LIU*(),Shuang PANG,Yan ZHANG |
| School of Artificial Intelligence and Data Science, Hebei University of Technology, Tianjin 300130, China |
|
|
|
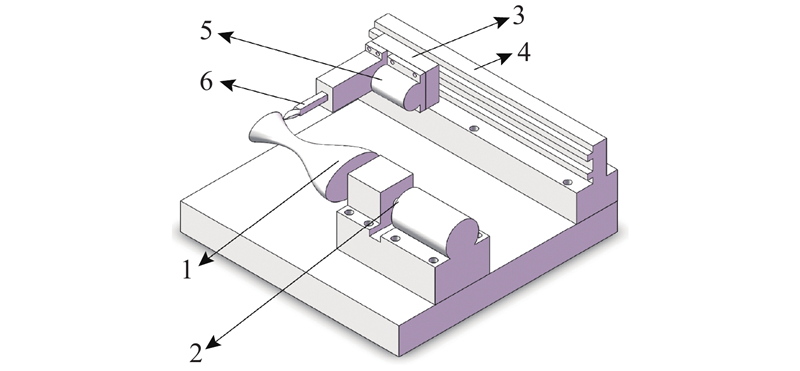
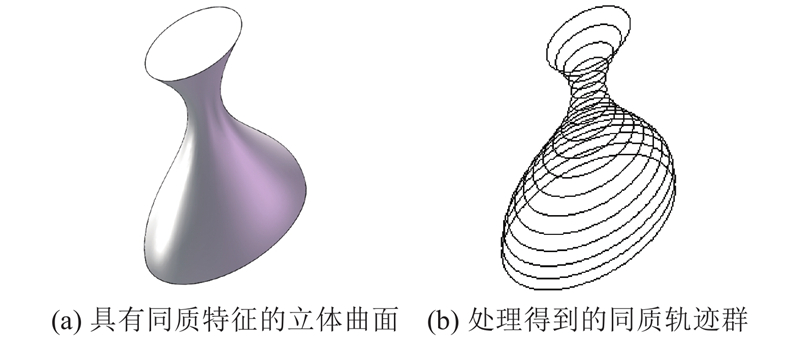
Abstract A new iterative learning control (ILC) strategy based on knowledge inheritance was proposed for a class of multi-dimensional trajectory with homogenous features. A kind of industrial robot system was taken as the control object throughout the tracking process. The homogeneous trajectory group (HTG) which was characterized by a gradual change in amplitude and the initial trajectory in HTG were respectively introduced. Then ILC scheme was utilized to track the initial trajectory in HTG. The effective knowledge could be obtained through ILC scheme from the initial trajectory. The knowledge was inherited to the next new trajectory in HTG for the first iteration. Gain transformation and offset transformation were applied according to the association of adjacent trajectories in HTG in order to effectively make the knowledge be inherited. Then the ILC with knowledge inheritance could make the industrial robot system track the new trajectory in fewer iterations. The overall learning times of tracking the HTG can be reduced and the tracking efficiency can be significantly improved compared with the traditional ILC. The theoretical analysis was presented to prove the convergence of the ILC based on knowledge inheritance, and the simulation results showed the advantage of the proposed control strategy.
|
|
Received: 23 May 2018
Published: 25 June 2019
|
|
|
|
Corresponding Authors:
Zuo-jun LIU
E-mail: bjhync@126.com;liuzuojun@hebut.edu.cn
|
知识继承型迭代学习控制的研究与应用
针对一类具有同质特征的多维轨迹群,提出基于知识继承的迭代学习控制(ILC)策略. 该策略以一类工业机器人系统为控制对象,在跟踪具有渐变幅值的同质轨迹群(HTG)时,应用迭代学习控制方法,从起始源轨迹中获得基准控制知识. 将基准控制知识预设为下一新轨迹迭代学习的首次运行知识. 通过增益变换和偏移变换实现迭代学习控制的知识继承,使得该类工业机器人系统加快对新轨迹的学习速度,以此降低跟踪同质轨迹群的整体学习次数,实现跟踪效率的较大提升. 理论分析和仿真结果证明了所提控制策略的优越性.
关键词:
迭代学习控制(ILC),
工业机器人,
同质轨迹群(HTG),
源轨迹,
知识继承,
跟踪效率
|
|
| [1] |
UCHIYAMA M Formulation of high-speed motion pattern of a mechanical arm by trial[J]. Transactions of the Society for Instrumentation and Control Engineering, 1978, 14 (6): 706- 712
doi: 10.9746/sicetr1965.14.706
|
|
|
| [2] |
ARIMOTO S, KAWAMURA S, MIYAZAKI F Bettering operation of robots by learning[J]. Journal of Robotic Systems, 1984, 1 (2): 123- 140
doi: 10.1002/(ISSN)1097-4563
|
|
|
| [3] |
许建新, 侯忠生 学习控制的现状与展望[J]. 自动化学报, 2005, 31 (6): 943- 955
XU Jian-xin, HOU Zhong-sheng On learning control: the state of the art and perspective[J]. Acta Automatica Sinica, 2005, 31 (6): 943- 955
|
|
|
| [4] |
AHN H S, CHEN Y Q, MOORE K L Iterative learning control: brief survey and categorization[J]. IEEE Transactions on Systems, Man, and Cybernetics, Part C, 2007, 37 (6): 1099- 1121
doi: 10.1109/TSMCC.2007.905759
|
|
|
| [5] |
HOELZLE D J, BARTON K L On spatial iterative learning control via 2-D convolution: stability analysis and computational efficiency[J]. IEEE Transactions on Control Systems Technology, 2016, 24 (4): 1504- 1512
doi: 10.1109/TCST.2015.2501344
|
|
|
| [6] |
孙明轩, 毕宏博, 周国良, 等 反馈辅助PD型迭代学习控制: 初值问题及修正策略[J]. 自动化学报, 2015, 41 (1): 157- 164
SUN Ming-xuan, BI Hong-bo, ZHOU Guo-liang, et al Feedback-aided PD-type iterative learning control: initial condition problem and rectifying strategies[J]. Acta Automatica Sinica, 2015, 41 (1): 157- 164
|
|
|
| [7] |
ZHANG L, CHEN W H, LIU J M A robust adaptive iterative learning control for trajectory tracking of permanent-magnet spherical actuator[J]. IEEE Transactions on Industrial Electronics, 2016, 63 (1): 291- 301
doi: 10.1109/TIE.2015.2464186
|
|
|
| [8] |
MENG D Y, MOORE K L Robust iterative learning control for nonrepetitive uncertain systems[J]. IEEE Transactions on Automatic Control, 2017, 62 (2): 907- 913
doi: 10.1109/TAC.2016.2560961
|
|
|
| [9] |
LIU Z J, LIU Z H, ZU L N, et al Flexible iterative learning control based expert system and its application[J]. International Journal of Fuzzy Logic and Intelligent Systems, 2009, 9 (3): 185- 190
doi: 10.5391/IJFIS.2009.9.3.185
|
|
|
| [10] |
吕庆, 方勇纯, 任逍 加速抑制随机初态误差影响的迭代学习控制[J]. 自动化学报, 2014, 40 (7): 1295- 1302
LV Qing, FANG Yong-chun, REN Xiao Iterative learning control for accelerated inhibition effect of initial state random error[J]. Acta Automatica Sinica, 2014, 40 (7): 1295- 1302
|
|
|
| [11] |
LI X F, REN Q Y, XU J X Precise speed tracking control of a robotic fish via iterative learning control[J]. IEEE Transactions on Industrial Electronics, 2015, 63 (4): 2221- 2228
|
|
|
| [12] |
池荣虎, 侯忠生, 黄彪 间歇过程最优迭代学习控制的发展: 从基于模型到数据驱动[J]. 自动化学报, 2017, 43 (6): 917- 932
CHI Rong-hu, HOU Zhong-sheng, HUANG Biao Optimal iterative learning control of batch processes: from model-based to data-driven[J]. Acta Automatica Sinica, 2017, 43 (6): 917- 932
|
|
|
| [13] |
韦巍, 蒋静坪 基于学习方法的机器人轨迹控制的实现[J]. 机器人, 1993, (5): 7- 12
WEI Wei, JIANG Jing-ping Learnning-based control of robot trajectory[J]. Robot, 1993, (5): 7- 12
|
|
|
| [14] |
何熊熊, 秦贞华, 张端 基于边界层的不确定机器人自适应迭代学习控制[J]. 控制理论与应用, 2012, 29 (8): 1090- 1093
HE Xiong-xiong, QIN Zhen-hua, ZHANG Duan Adaptive iterative learning control for uncertain robot based on boundary layer[J]. Control Theory and Applications, 2012, 29 (8): 1090- 1093
|
|
|
| [15] |
张雪峰, 秦现生, 冯华山, 等 液压驱动四足机器人单腿竖直跳跃运动分析与控制[J]. 机器人, 2013, 35 (2): 135- 141
ZHANG Xue-feng, QIN Xian-sheng, FENG Hua-shan, et al Motion analysis and control of a single leg of hydraulically actuated quadruped robots during vertical hopping[J]. Robot, 2013, 35 (2): 135- 141
|
|
|
| [16] |
田国会, 袁丽, 李国栋, 等. 结合迭代学习控制的视觉伺服物品抓取方法[J]. 华中科技大学学报: 自然科学版, 2015, 43(增1): 536-540.
TIAN Guo-hui, YUAN Li, LI Guo-dong, et al. Visual servoing method combining iterative learning control for household object handing[J]. Journal of Huazhong University of Science and Technology: Natural Science Edition, 2015, 43(Suppl.1): 536-540.
|
|
|
| [17] |
朱雪枫, 王建辉, 方晓柯, 等 非线性迭代学习算法在机器人上肢康复中的应用[J]. 控制与决策, 2016, 31 (7): 1325- 1329
ZHU Xue-feng, WANG Jian-hui, FANG Xiao-ke, et al Nonlinear iterative learning algorithm and its application in upper limb rehabilitation[J]. Control and Decision, 2016, 31 (7): 1325- 1329
|
|
|
| [18] |
SAAB S S, VOGT W G, MICKLE M H learning control algorithms for tracking " slowly” varying trajectories[J]. IEEE Transactions on System, Man, and Cybernetics, Part B, 1997, 27 (4): 657- 670
doi: 10.1109/3477.604109
|
|
|
| [19] |
XU J X Direct learning of control efforts for trajectories with different time scales[J]. IEEE Transactions on Automatic Control, 1998, 43 (7): 1027- 1030
doi: 10.1109/9.701122
|
|
|
| [20] |
XU J X, XU J On iterative learning from different tracking tasks in the presence of time-varying uncertainties[J]. IEEE Transactions on Systems, Man, and Cybernetics, Part B, 2004, 34 (1): 589- 597
doi: 10.1109/TSMCB.2003.818433
|
|
|
| [21] |
王晔, 刘山 期望轨迹可变的非线性时变系统迭代学习控制[J]. 浙江大学学报: 工学版, 2009, 43 (5): 839- 843
WANG Ye, LIU Shan Iterative learning control of non-identical desired trajectories for a class of nonlinear time-varying systems[J]. Journal of Zhejiang University: Engineering Science, 2009, 43 (5): 839- 843
|
|
|
| [22] |
安通鉴, 刘祥官 目标轨迹更新的点到点鲁棒迭代学习控制[J]. 浙江大学学报: 工学版, 2015, 49 (1): 87- 92
AN Tong-jian, LIU Xiang-guan Point-to-point robust iterative learning control via reference trajectory regulating[J]. Journal of Zhejiang University: Engineering Science, 2015, 49 (1): 87- 92
|
|
|
| [23] |
周伟, 于淼 基于高阶内模的非线性离散系统迭代学习控制[J]. 浙江大学学报: 工学版, 2015, 49 (4): 754- 762
ZHOU Wei, YU Miao High-order internal model based iterative learning control for discrete-time nonlinear system[J]. Journal of Zhejiang University: Engineering Science, 2015, 49 (4): 754- 762
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|