|
|
|
| EWT-LSTM based industrial robot joint anomaly detection |
Qincheng JIANG1( ),Jianfeng TAO1,2,*(),Yangyang WANG1,Yulei ZHANG1,2,Chengliang LIU1,2 ),Jianfeng TAO1,2,*(),Yangyang WANG1,Yulei ZHANG1,2,Chengliang LIU1,2 |
1. School of Mechanical and Power Engineering, Shanghai Jiao Tong University, Shanghai 200240, China
2. State Key Laboratory of Mechanical System and Vibration, Shanghai Jiao Tong University, Shanghai 200240, China |
|
|
|
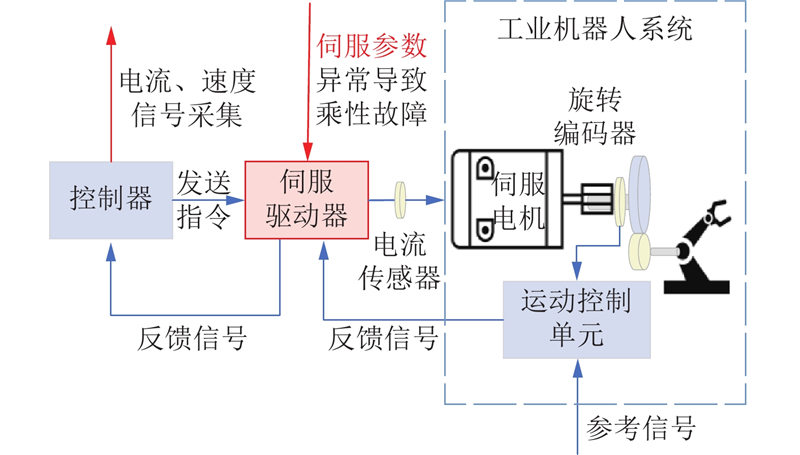
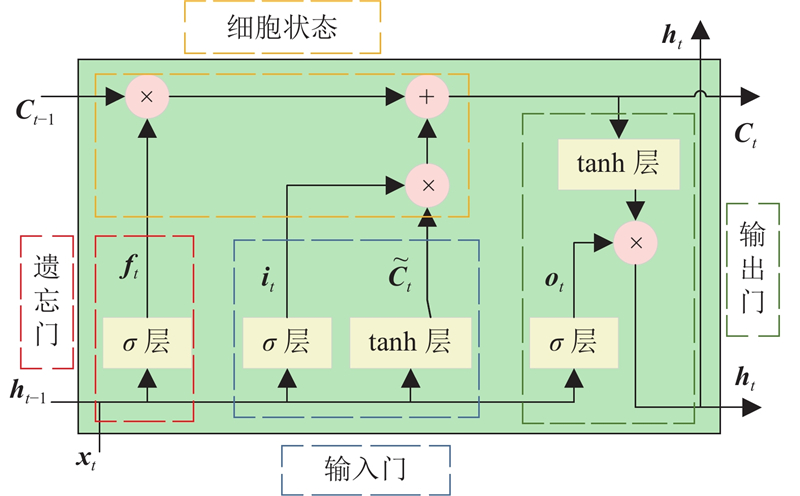
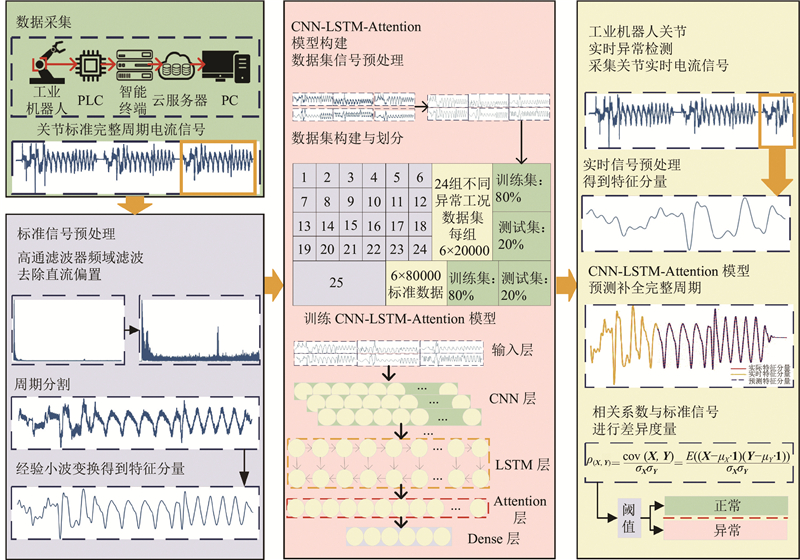
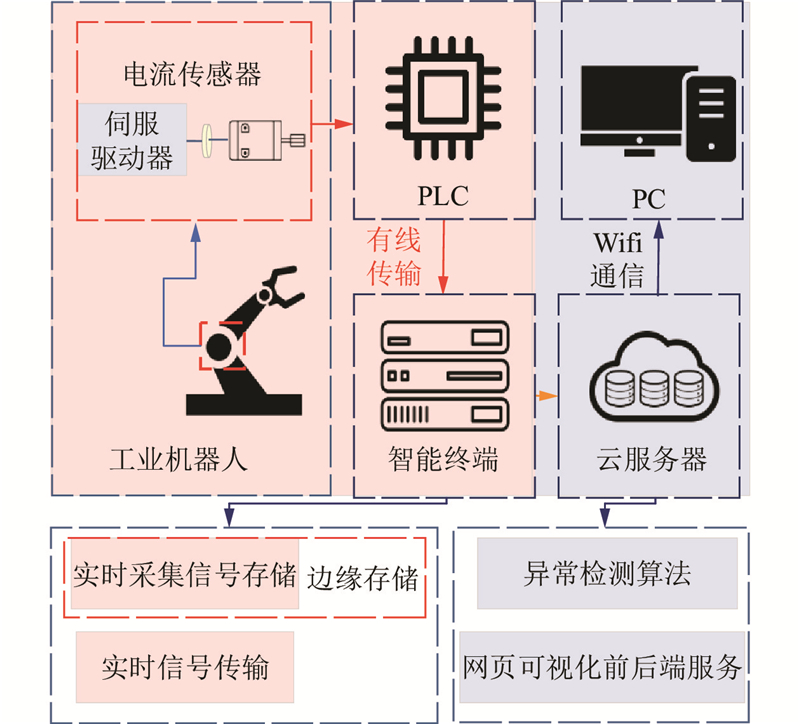
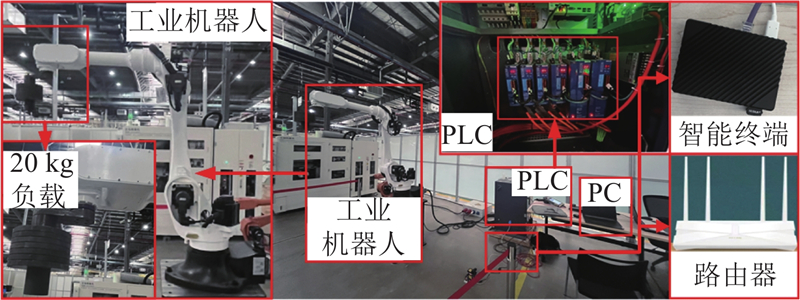
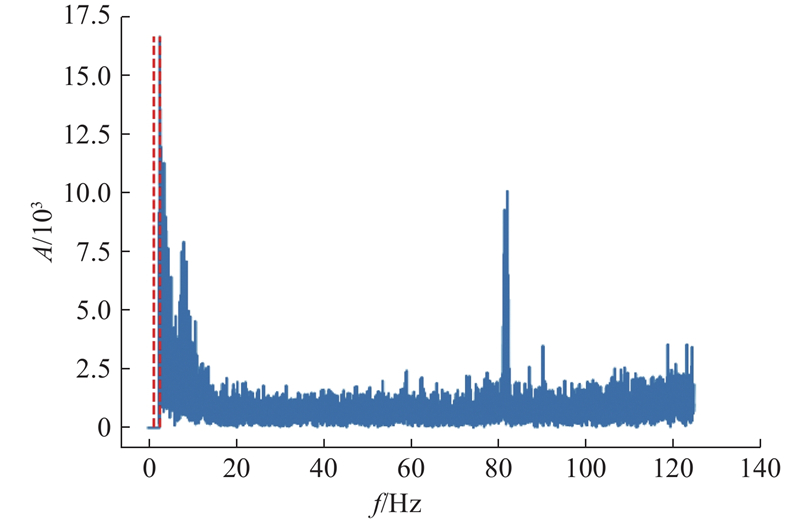
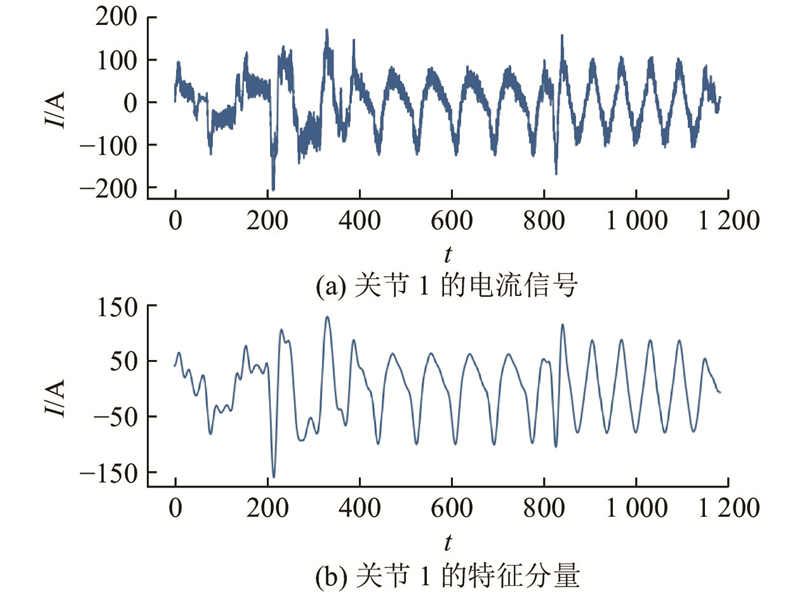
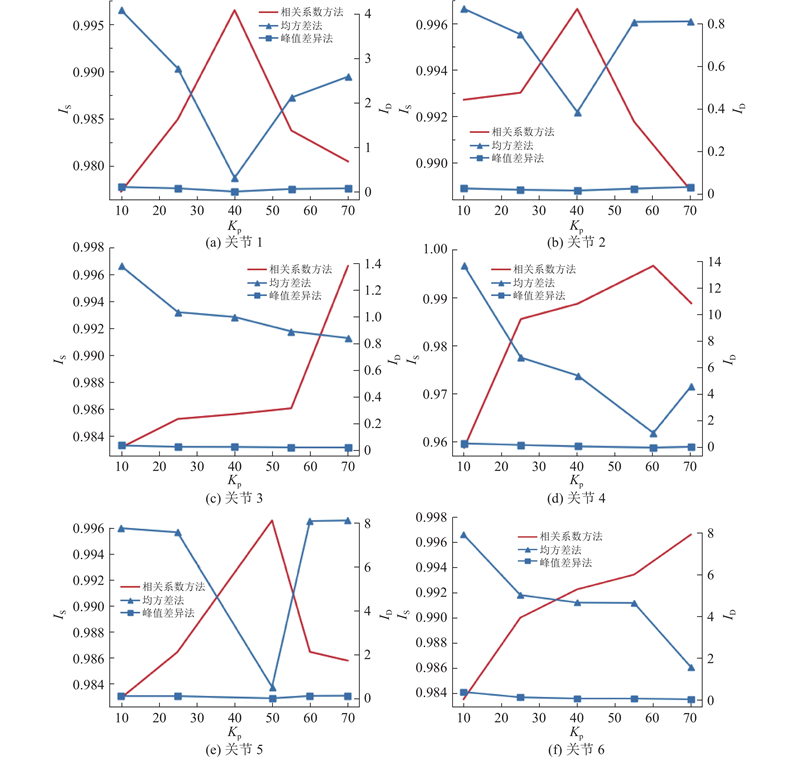
Abstract A novel detection method combining empirical wavelet transform (EWT) with long short-term memory (LSTM) network was proposed in order to address the challenges of joint servo parameter anomaly detection in industrial robot factory inspection scenarios, particularly under the requirements of sensor-free implementation, high accuracy and real-time performance. An integrated PLC-intelligent terminal-cloud server platform was developed for real-time joint data acquisition, enabling sensorless collection, storage and transmission of joint current and speed signals while supporting cloud-based condition monitoring and anomaly detection. EWT was employed to decompose current signals into inherently smooth characteristic components, which were directly fed into the LSTM network as input features to enhance prediction accuracy. A bidirectional LSTM architecture enhanced by convolutional neural networks (CNNs) and attention mechanisms was implemented to reconstruct complete periodic signals in order to resolve incomplete signal cycles during robotic motion. Then these reconstructed signals were compared with standard signal components through difference metrics to achieve real-time anomaly detection. Experimental validation using 1 set of standard servo parameters and 24 sets of abnormal parameters demonstrated that the proposed method achieved precise fault joint localization, maintained strong consistency with injected anomaly severity levels, and reached a detection accuracy exceeding 90%.
|
|
Received: 01 June 2024
Published: 25 April 2025
|
|
|
| Fund: 上海市人工智能重大专项资助项目(2021SHZDZX0102). |
|
Corresponding Authors:
Jianfeng TAO
E-mail: jqc9837@sjtu.edu.cn;jftao@sjtu.edu.cn
|
基于EWT-LSTM的工业机器人关节异常检测
针对工业机器人制造企业工业机器人出厂检测场景关节伺服参数异常检测问题和不添加传感器、高准确率和实时性的需求,提出基于经验小波变换(EWT)和长短时记忆网络(LSTM)的检测方法. 构建工业机器人可编程逻辑控制器-智能终端-云服务器一体化关节实时数据采集平台,无须额外添加传感器即可实现关节电流和速度信号的实时采集、存储和传输,在云端进行状态监测和异常检测. 利用EWT分解电流信号以获得特征分量,将光滑的特征分量作为LSTM模型的输入,提高了预测准确性. 针对机器人运动周期中实时信号周期不完整的问题,采用卷积神经网络和注意力机制优化的双向LSTM模型预测补全完整的周期信号,与标准信号特征分量进行差异度量,实现实时异常检测. 采用1组标准伺服参数和24组异常伺服参数进行故障注入实验,验证了利用该方法能够定位异常关节,与注入异常程度有较好的一致性,检测准确率超过90%.
关键词:
工业机器人,
经验小波变换,
长短时记忆网络,
异常检测,
云边协同
|
|
| [1] |
YAMADA Y, NAGAMATSU S, SATO Y. Development of multi-arm robots for automobile assembly [C]// Proceedings of IEEE International Conference on Robotics and Automation . Nagoya: IEEE, 1995: 2224-2229.
|
|
|
| [2] |
张康. 工业机器人柔性关节关键子部件健康评估方法研究[D]. 上海: 上海交通大学, 2022.
ZHANG Kang. Research on health assessment method of key components of flexible joint of industrial robot [D]. Shanghai: Shanghai Jiao Tong University, 2022.
|
|
|
| [3] |
SPIEWAK S A, DUGGIRALA R, BARNETT K Predictive monitoring and control of the cold extrusion process[J]. CIRP Annals, 2000, 49 (1): 383- 386
doi: 10.1016/S0007-8506(07)62970-9
|
|
|
| [4] |
YANG Bin, GUO Kai, ZHOU Qian, et al Early chatter detection in robotic milling under variable robot postures and cutting parameters[J]. Mechanical Systems and Signal Processing, 2023, 186: 109860
doi: 10.1016/j.ymssp.2022.109860
|
|
|
| [5] |
IZAGIRRE U, ANDONEGUI I, ECIOLAZA L, et al Towards manufacturing robotics accuracy degradation assessment: a vision-based data-driven implementation[J]. Robotics and Computer-Integrated Manufacturing, 2021, 67: 102029
doi: 10.1016/j.rcim.2020.102029
|
|
|
| [6] |
HE Ruikai, XU Peng, CHEN Zhibo, et al A non-intrusive approach for fault detection and diagnosis of water distribution systems based on image sensors, audio sensors and an inspection robot[J]. Energy and Buildings, 2021, 243: 110967
doi: 10.1016/j.enbuild.2021.110967
|
|
|
| [7] |
CHEN Tingting, LIU Xueping, XIA Bizhong, et al Unsupervised anomaly detection of industrial robots using sliding-window convolutional variational autoencoder[J]. IEEE Access, 2020, 8: 47072- 47081
doi: 10.1109/ACCESS.2020.2977892
|
|
|
| [8] |
MUHAMMET O, NEIL D S, ERDEM O. Robotically assisted active vibration control in milling: a feasibility study[J]. Mechanical Systems and Signal Processing, 2022, 177: 109152
|
|
|
| [9] |
QIAO Guixiu, WEISS B A Quick health assessment for industrial robot health degradation and the supporting advanced sensing development[J]. Journal of Manufacturing Systems, 2018, 48: 51- 59
doi: 10.1016/j.jmsy.2018.04.004
|
|
|
| [10] |
潘京辉. 多关节协作机器人故障诊断及容错控制研究[D]. 北京: 北京科技大学, 2023.
PAN Jinghui. Fault diagnosis and fault tolerant control of multi-joint cooperative robot [D]. Beijing: University of Science and Technology Beijing, 2023.
|
|
|
| [11] |
GAJULA K, MAREPALLI L K, YAO Xiu, et al Recursive least squares and adaptive Kalman filter-based state and parameter estimation for series arc fault detection on DC microgrids[J]. IEEE Journal of Emerging and Selected Topics in Power Electronics, 2022, 10 (4): 4715- 4724
doi: 10.1109/JESTPE.2021.3135409
|
|
|
| [12] |
XIANG Xianbo, YU Caoyang, ZHANG Qin On intelligent risk analysis and critical decision of underwater robotic vehicle[J]. Ocean Engineering, 2017, 140: 453- 465
doi: 10.1016/j.oceaneng.2017.06.020
|
|
|
| [13] |
LIU Yutian, CHEN Jungan. Integrated fault diagnosis method of mobile robot [C]// Theoretical and Mathematical Foundations of Computer Science . Berlin: Springer, 2011: 372-379.
|
|
|
| [14] |
WU You, FU Zhuang, FEI Jian Fault diagnosis for industrial robots based on a combined approach of manifold learning, treelet transform and Naive Bayes[J]. Review of Scientific Instruments, 2020, 91 (1): 015116
doi: 10.1063/1.5118000
|
|
|
| [15] |
FAN Song, ZHANG Limin, WANG Yufeng, et al. Vision-based fault classification for monitoring industrial robot [C]// 37th Chinese Control Conference . Wuhan: IEEE, 2018: 5889-5894.
|
|
|
| [16] |
LI Jimeng, YAO Xifeng, WANG Xiangdong, et al Multiscale local features learning based on BP neural network for rolling bearing intelligent fault diagnosis[J]. Measurement, 2020, 153: 107419
doi: 10.1016/j.measurement.2019.107419
|
|
|
| [17] |
ELANGOVAN K, YOKH K T, MOHAN R E, et al Fault diagnosis of a reconfigurable crawling–rolling robot based on support vector machines[J]. Applied Sciences, 2017, 7 (10): 1025
doi: 10.3390/app7101025
|
|
|
| [18] |
马百腾. 基于EEMD-HT-峭度分析的工业机器人关节电流信号异常检测方法: 2022100920200 [P]. 2022-01-26.
|
|
|
| [19] |
CHENG Fangzhou, RAGHAVAN A, JUNG D, et al. High-accuracy unsupervised fault detection of industrial robots using current signal analysis [C]// IEEE International Conference on Prognostics and Health Management . San Francisco: IEEE, 2019: 1–8.
|
|
|
| [20] |
赵阳. 基于改进经验小波变换的风电机组齿轮箱故障诊断[D]. 北京: 北京交通大学, 2020.
ZHAO Yang. Fault diagnosis of wind turbine gearbox based on improved empirical wavelet transform [D]. Beijing: Beijing Jiao Tong University, 2020.
|
|
|
| [21] |
XU Yonggang, ZHANG Kun, MA Chaoyong, et al An improved empirical wavelet transform and its applications in rolling bearing fault diagnosis[J]. Applied Sciences, 2018, 8 (12): 2352
doi: 10.3390/app8122352
|
|
|
| [22] |
庞学丽, 宋坤, 姚红云, 等 基于VMD-ISSA-LSTM的短时交通流预测研究[J]. 现代电子技术, 2024, 47 (8): 31- 36
PANG Xueli, SONG Kun, YAO Hongyun, et al Research on short-term traffic flow prediction based on VMD-ISSA-LSTM[J]. Modern Electronics Technique, 2024, 47 (8): 31- 36
|
|
|
| [23] |
高正. 基于EWT和特征融合的钻机钻杆故障识别研究[D]. 杭州: 浙江大学, 2019.
GAO Zheng. Research on fault identification of drill pipe drill based on EWT and feature fusion [D]. Hangzhou: Zhejiang University, 2019.
|
|
|
| [24] |
GILLES J Empirical wavelet transform[J]. IEEE Transactions on Signal Processing, 2013, 61 (16): 3999- 4010
doi: 10.1109/TSP.2013.2265222
|
|
|
| [25] |
龙霞飞, 何志成, 周凌, 等. 基于KOA-CNN-BiLSTM-AM的风电齿轮箱故障诊断研究[EB/OL]. [2025-02-09]. http://kns.cnki.net/kcms/detail/44.1259.TH.20240506.1728.002.html.
|
|
|
| [26] |
马良玉, 吕若萌 用SSA优化CNN-LSTM-SEnet预测模型实现风电机组故障预警[J]. 电力科学与工程, 2024, 40 (6): 1- 10
MA Liangyu, LV Ruomeng Wind turbine fault warning with SSA optimized CNN-LSTM-SEnet prediction model[J]. Electric Power Science and Engineering, 2024, 40 (6): 1- 10
doi: 10.3969/j.ISSN.1672-0792.2024.06.001
|
|
|
| [27] |
BAHDANAU D, CHO K, BENGIO Y. Neural machine translation by jointly learning to align and translate: arXiv: 1409.0473 [EB/OL]. [2024-12-20]. https://formacion.actuarios.org/wp-content/uploads/2024/05/1409.0473-Neural-Machine-Translation-By-Jointly-Learning-To-Align-And-Translate.pdf.
|
|
|
| [28] |
唐宇翔, 陶建峰, 刘成良 盾构机刀盘主驱动电机异常检测与性能评估[J]. 西安交通大学学报, 2023, 57 (10): 132- 142
TANG Yuxiang, TAO Jianfeng, LIU Chengliang Abnormal detection and performance evaluation of main drive motor of shield tunneling machine cutter head[J]. Journal of Xi'an Jiaotong University, 2023, 57 (10): 132- 142
doi: 10.7652/xjtuxb202310013
|
|
|
| [29] |
杨琦, 陈智才 基于EMD和相关系数法的列车滚动轴承故障诊断方法研究[J]. 电力机车与城轨车辆, 2018, 41 (3): 15- 17
YANG Qi, CHEN Zhicai Fault diagnosis method for train rolling bearing based on EMD and CCM[J]. Electric Locomotives and Mass Transit Vehicles, 2018, 41 (3): 15- 17
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|