|
|
|
| Corner recognition of industrial robot contour curve for visual servoing |
Yi-xiong FENG1( ),Kang-jie LI1,Yi-cong GAO1,*(),Hao ZHENG2 ),Kang-jie LI1,Yi-cong GAO1,*(),Hao ZHENG2 |
1. State Key Laboratory of Fluid Power and Mechatronic Systems, Zhejiang University, Hangzhou 310027, China
2. Hangzhou Innovation Institute, Beihang University, Hangzhou 310000, China |
|
|
|
Abstract A contour curve corner recognition algorithm was presented to solve the problem of low efficiency of corner recognition of contour curve in visual servoing of industrial robots, which affects the accuracy of real-time positioning. A coding model of gripper contour curve based on Freeman chain code is established, and the differential code is used to unify the coding model of the characteristics of contour curve angle change of gripper. The differential codes are weighted locally and the curvature values of points on the gripper contour curve are calculated to accurately quantify the identification of the corners through convolution operation based on differential codes and convolution coefficients. The preliminary selection of the selected corner points is based on the candidate corner point threshold, the distance between the farthest point of the point and the maximum point value in the local range. A burr filtering for planar contour curve is used to screen mistaken points, moreover an accurate recognition of gripper corner point is realized, which provides reliable location information for real-time positioning in visual servo system. The accuracy and efficiency of the proposed method are verified by comparing with the existing corner recognition algorithms of planar contour curves, and the corner extraction process of the proposed method has strong robustness.
|
|
Received: 09 July 2020
Published: 28 August 2020
|
|
|
|
Corresponding Authors:
Yi-cong GAO
E-mail: fyxtv@zju.edu.cn;gaoyicong@zju.edu.cn
|
面向视觉伺服的工业机器人轮廓曲线角点识别
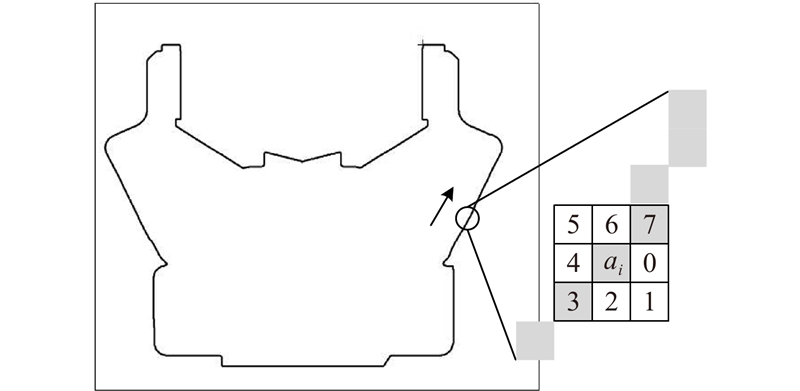
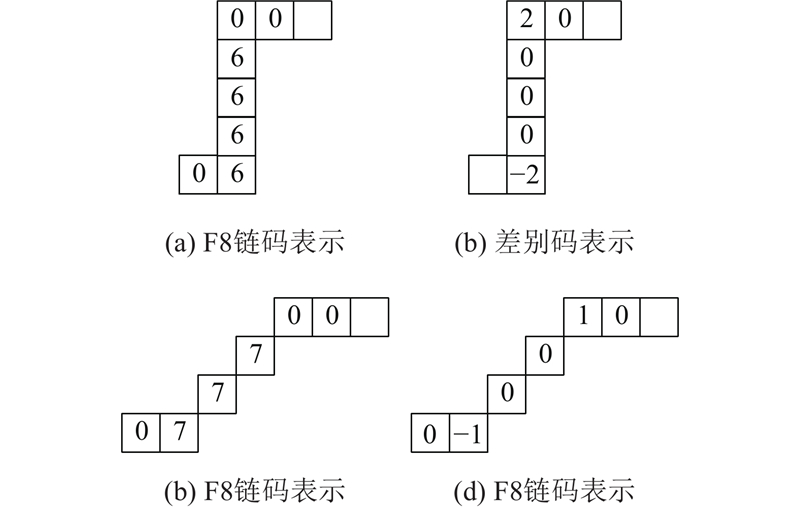
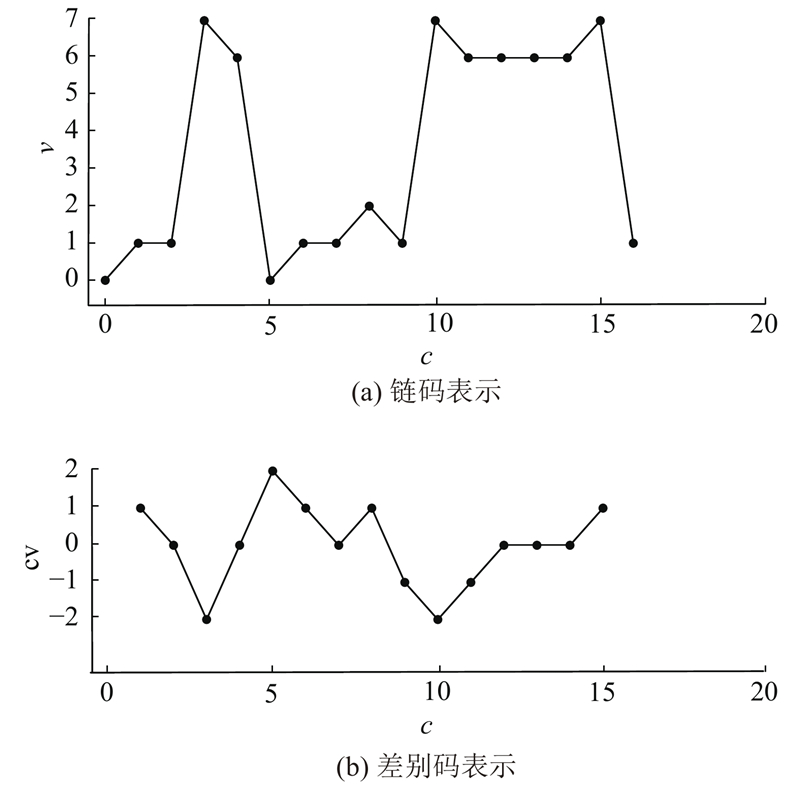
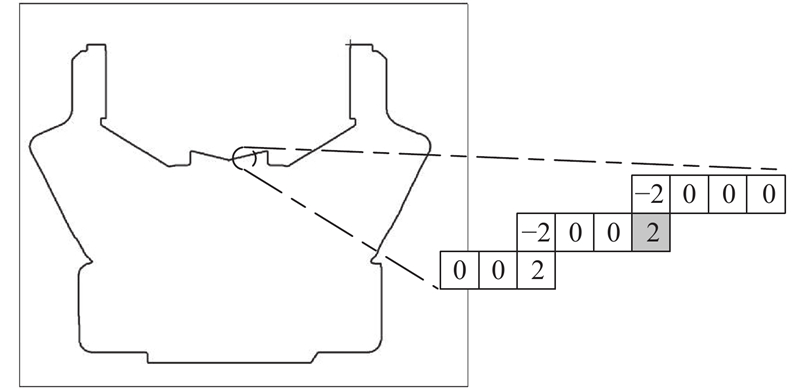
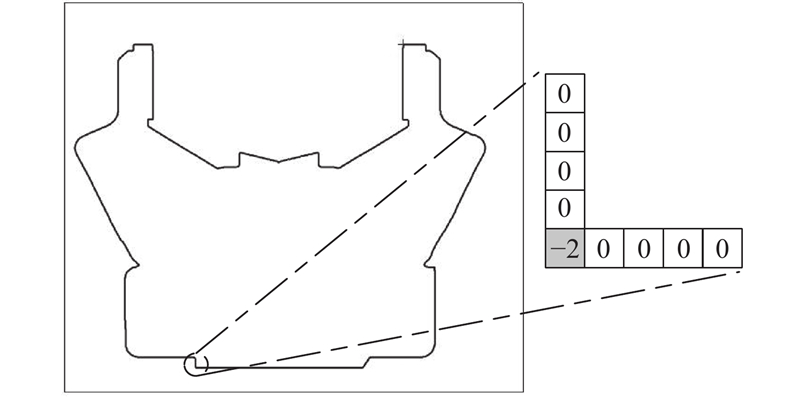
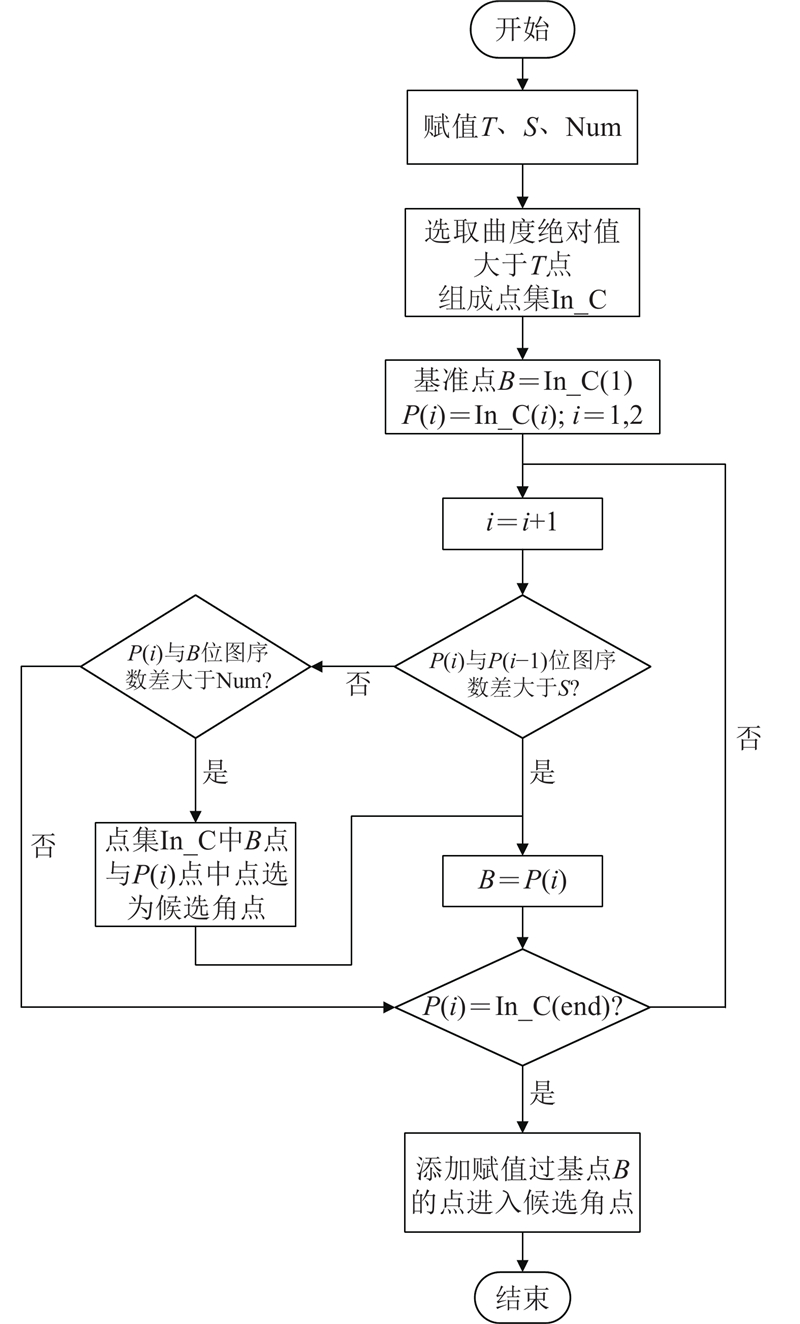
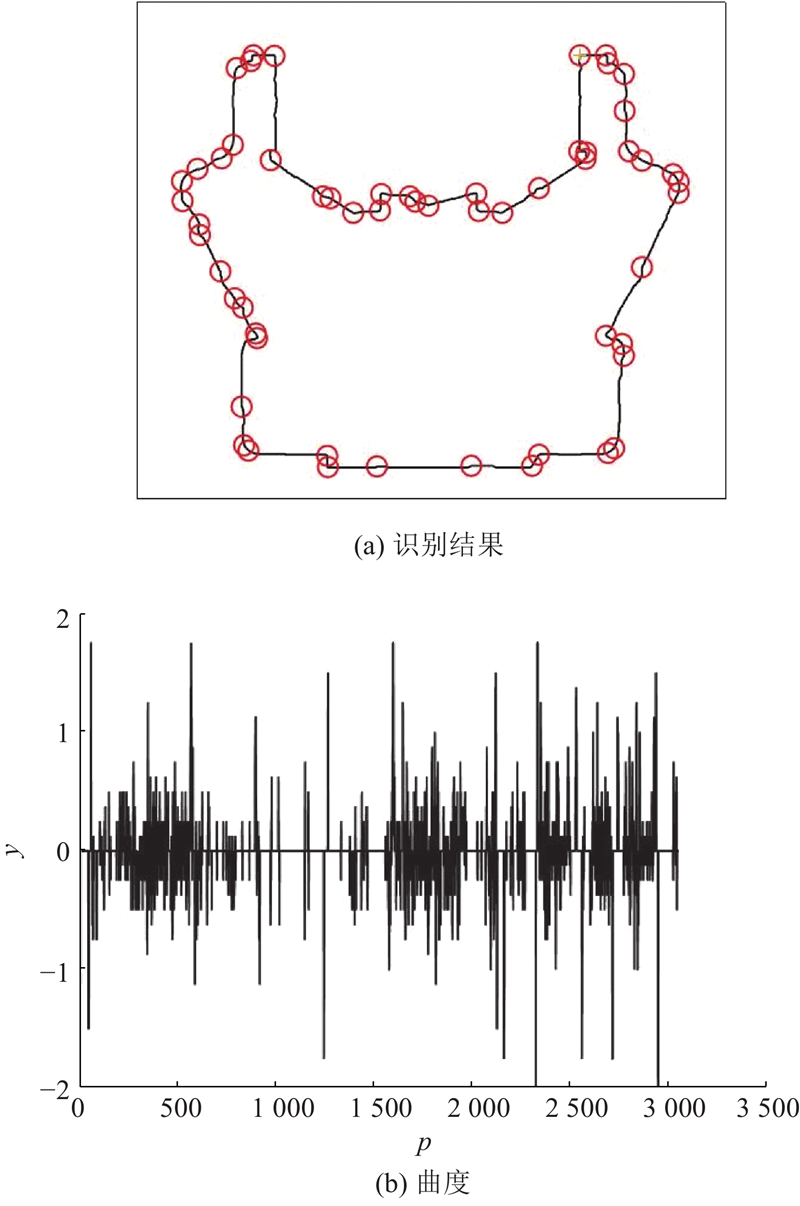
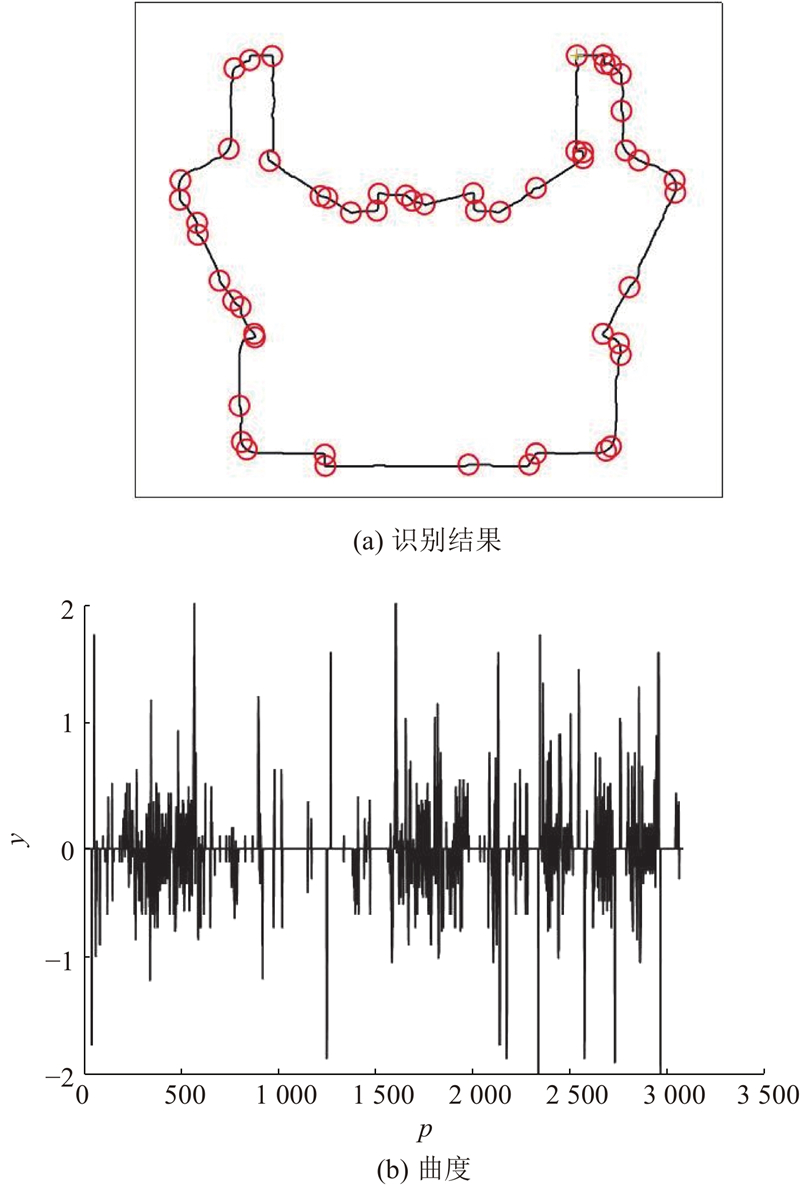
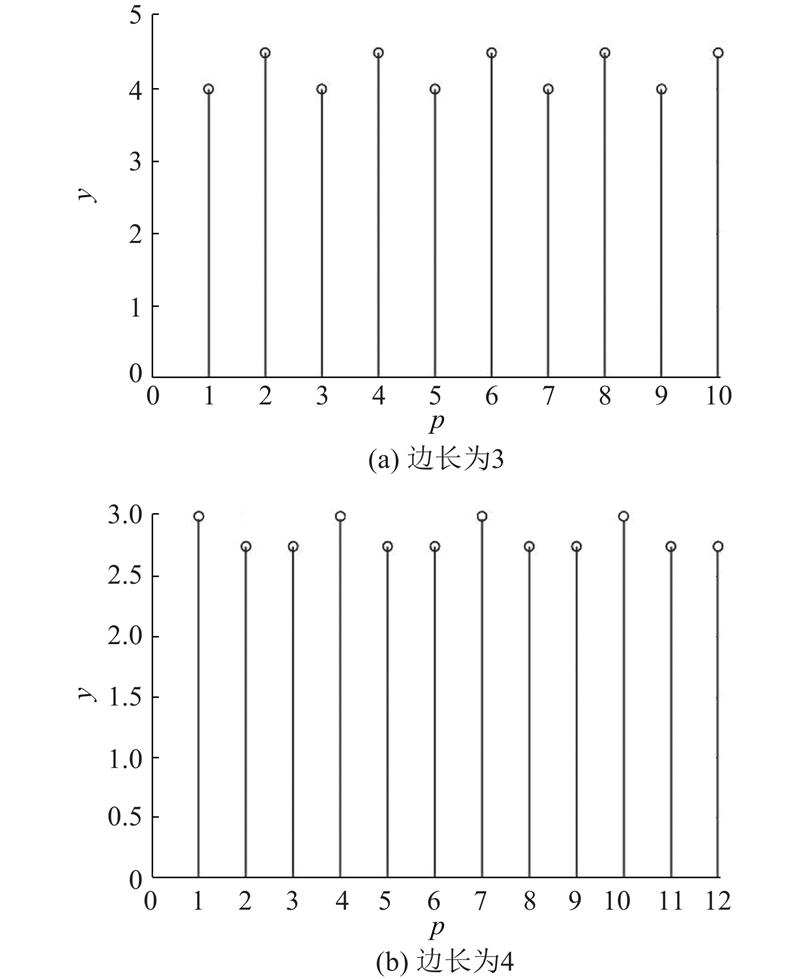
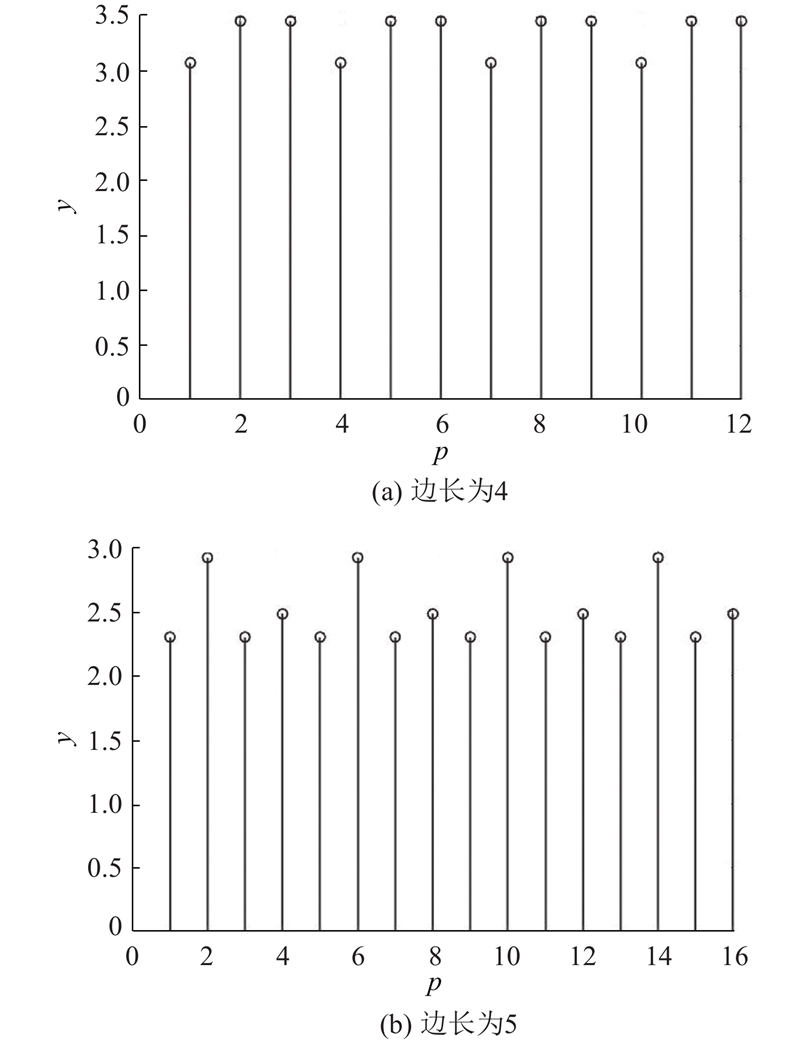
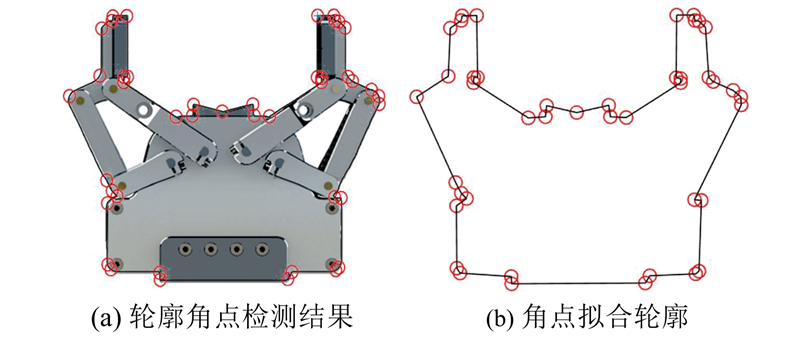
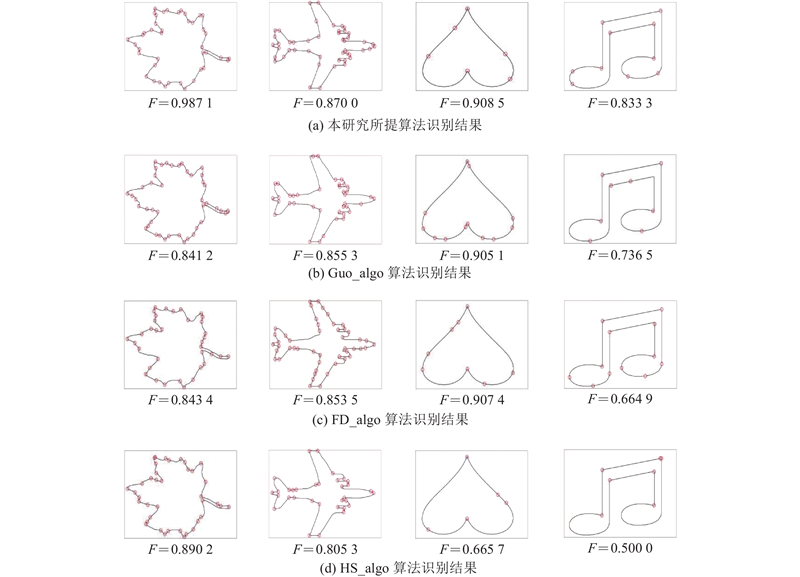
为了解决工业机器人视觉伺服中轮廓曲线角点识别效率低进而影响实时定位准确性的问题,提出面向视觉伺服的工业机器人轮廓曲线角点识别算法. 建立基于Freeman链码的机械爪轮廓曲线编码模型,利用差别码对机械爪轮廓曲线的角度变化特征进行统一编码建模. 通过基于差别码和卷积系数的卷积运算,对差别码进行局部非线性加权,计算机械爪轮廓曲线上各点的曲度精确量化辨识机械爪角点. 基于候选角点阈值、点的最远领域间隔和局部范围最多点数进行获选角点的初步选取. 采用平面轮廓曲线毛刺过滤筛选误识角点,实现机械爪角点的精确识别,为视觉伺服中实时定位提供可靠的位置信息. 通过与已有平面轮廓曲线角点识别算法对比,验证本研究所提方法的准确性和高效性,提取角点过程具有较强的鲁棒性.
关键词:
工业机器人,
视觉伺服,
机械爪,
角点识别,
平面轮廓曲线
|
|
| [1] |
HAJILOO A, KESHMIRI M, XIE W F, et al Robust on-line model predictive control for a constrained image based visual servoing[J]. IEEE Transactions on Industrial Electronics, 2016, 63 (4): 2242- 2250
|
|
|
| [2] |
QIU Z, HU S, LIANG X Model predictive control for constrained image-based visual servoing in uncalibrated environments[J]. Asian Journal of Control, 2018, 21 (2): 783- 799
|
|
|
| [3] |
ANJUM F, KANWAL N, CLARK A F, et al Statistical evaluation of corner detectors: does the statistical test have an effect[J]. IET Computer Vision, 2017, 12 (7): 1018- 1030
|
|
|
| [4] |
LIN X, ZHU C, ZHANG Q, et al Geometric mesh corner detection using triangle principle[J]. Electronics Letters, 2017, 53 (20): 1354- 1356
doi: 10.1049/el.2017.1353
|
|
|
| [5] |
林颖, 龚小谨, 刘济林 基于单位视球的鱼眼相机标定方法[J]. 浙江大学学报: 工学版, 2013, 47 (8): 1500- 1507
LIN Ying, GONG Xiao-jing, LIU Ji-lin Calibration method of fisheye camera based on unit eyeball[J]. Journal of Zhejiang University: Engineering Science, 2013, 47 (8): 1500- 1507
|
|
|
| [6] |
YAO G B, CUI J, DENG K Z, et al Robust harris corner matching based on the quasi-homography transform and self-adaptive window for wide-baseline stereo images[J]. IEEE Transactions on Geoscience and Remote Sensing, 2018, 56 (1): 559- 574
doi: 10.1109/TGRS.2017.2751567
|
|
|
| [7] |
竺乐庆, 陈文智, 幸锐, et al 鲁棒的掌纹图像特征提取方法[J]. 浙江大学学报: 工学版, 2009, 43 (8): 1412- 1418
ZHU Le-qing, CHEN Wen-zhi, XING Rui, et al Robust palmprint image feature extraction method[J]. Journal of Zhejiang University: Engineering Edition, 2009, 43 (8): 1412- 1418
|
|
|
| [8] |
KAGAMI S, OMI K, HASHIMOTO K Alignment of a flexible sheet object with position-based and image-based visual servoing[J]. Advanced Robotics, 2016, 30 (15): 1- 14
|
|
|
| [9] |
QIN Z, PENG W, JIA S, et al Precise robotic assembly for large-scale objects based on automatic guidance and alignment[J]. IEEE Transactions on Instrumentation and Measurement, 2016, 65 (6): 1398- 1411
doi: 10.1109/TIM.2016.2526738
|
|
|
| [10] |
SHUI P L, ZHANG W C Corner detection and classification using anisotropic directional derivative representations[J]. IEEE Transactions on Image Processing a Publication of the IEEE Signal Processing Society, 2013, 22 (8): 3204- 3218
doi: 10.1109/TIP.2013.2259834
|
|
|
| [11] |
SANCHEZ J, MONZON N, SALGDO A An analysis and implementation of the harris corner detector[J]. Image Processing on Line, 2018, 9: 325- 328
|
|
|
| [12] |
XIAO J, XIA Z, WANG B, et al Adaptive algorithm for corner detecting based on the degree of sharpness of the contour[J]. Optical Engineering, 2011, 50 (4): 047008
doi: 10.1117/1.3569846
|
|
|
| [13] |
赵文彬, 张艳宁 角点检测技术综述[J]. 计算机应用研究, 2006, 23 (10): 17- 19
ZHAO Wen-bin, ZHANG Yan-ning Survey on corner detection[J]. Application Research of Computers, 2006, 23 (10): 17- 19
doi: 10.3969/j.issn.1001-3695.2006.10.006
|
|
|
| [14] |
ROSENFELD A, JOHNSTON E Angle detection on digital curves[J]. IEEE Transactions on Computers, 1973, 22 (9): 875- 878
|
|
|
| [15] |
ROSENFELD A, WESZKA J S An improved method of angle detection on digital curves[J]. IEEE Transactions on Computers, 1975, 24 (9): 940- 941
|
|
|
| [16] |
CHETVERIKOV D A simple and efficient algorithm for detection of high curvature points in planar curves[J]. Lecture Notes in Computer Science, 2003, 128: 175- 184
|
|
|
| [17] |
FREEMAN H, DAVIS L S A corner-finding algorithm for chain-coded curves[J]. IEEE Transactions on Computers, 1977, 26 (3): 297- 303
doi: 10.1109/TC.1977.1674825
|
|
|
| [18] |
BEUS H L, TIU S S H An improved corner detection algorithm based on chain-coded plane curves[J]. Pattern Recognition, 1987, 20 (3): 291- 296
doi: 10.1016/0031-3203(87)90004-5
|
|
|
| [19] |
BANDERA A, URDIALES C, ARREBOLA F, et al Corner detection by means of adaptively estimated curvature function[J]. Electronics Letters, 2000, 36 (2): 124- 126
doi: 10.1049/el:20000177
|
|
|
| [20] |
SARFRAZ M, MASOOD A, ASIM M R. A new approach to corner detection [M]// Computer vision and graphics. Dordrecht: Springer, 2006: 528-533.
|
|
|
| [21] |
HARON H, SHAMSUDDIN S M, MOHAMED D A new corner detection algorithm for chain code representation[J]. International Journal of Computer Mathematics, 2005, 82 (8): 941- 950
doi: 10.1080/00207160410001684271
|
|
|
| [22] |
郭晓冬. 图像角点检测算法研究[D]. 长沙: 国防科学技术大学, 2007.
Guo Xiao-dong. A research of corner detection algorithms [D]. Changsha: National University of Defense Technology, 2007.
|
|
|
| [23] |
SPONTON H, CARDELINO J A review of classic edge detectors[J]. Image Processing on Line, 2015, 27 (2): 533- 545
|
|
|
| [24] |
ZALIK B, MONGUS D, LUKAC N, et al Efficient chain code compression with interpolative coding[J]. Information Sciences, 2018, 439?440: 39- 49
doi: 10.1016/j.ins.2018.01.045
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|