|
|
|
| Prediction and compensation of robot deformation under pressure force of pressure foot |
Ying-jie GUO( ),Fan GU,Hui-yue DONG*(),Hai-jin WANG ),Fan GU,Hui-yue DONG*(),Hai-jin WANG |
| Key Laboratory of Advanced Manufacturing Technology of Zhejiang Province, School of Mechanical Engineering, Zhejiang University, Hangzhou 310027, China |
|
|
|
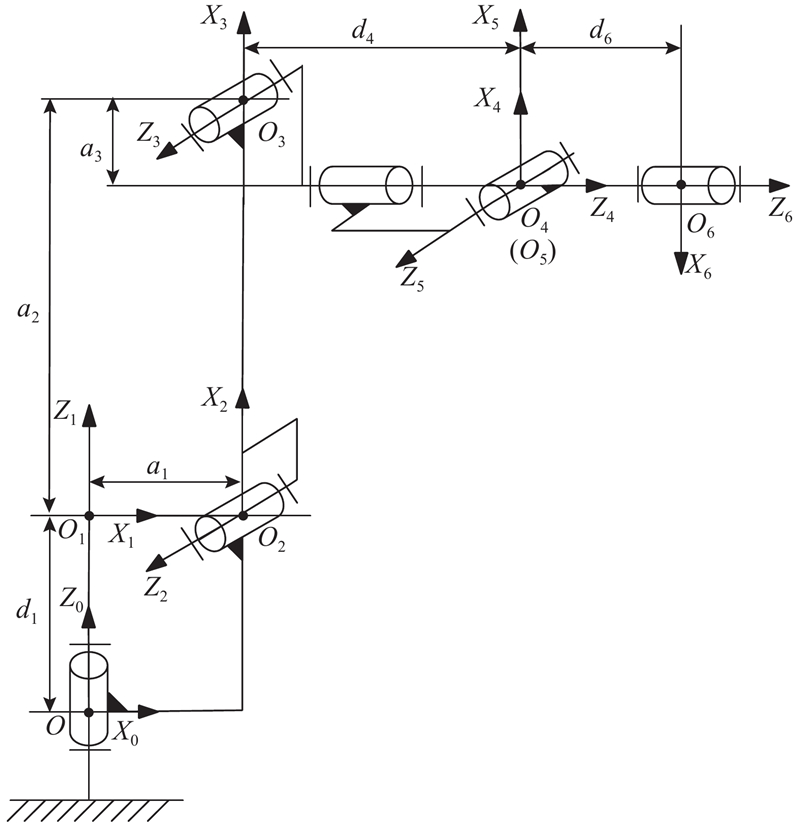
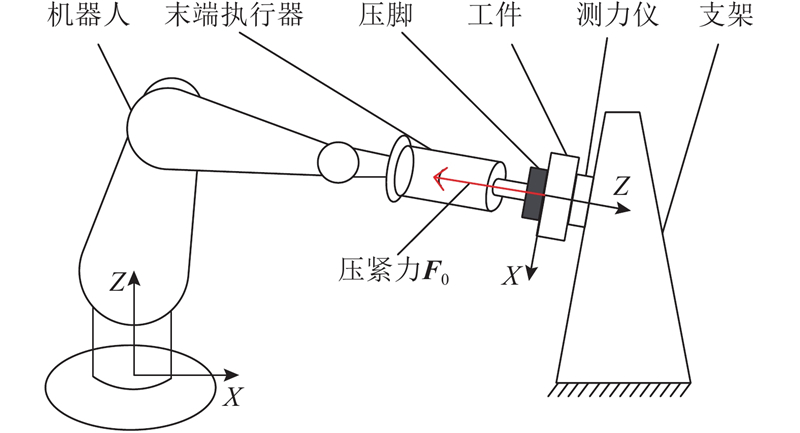
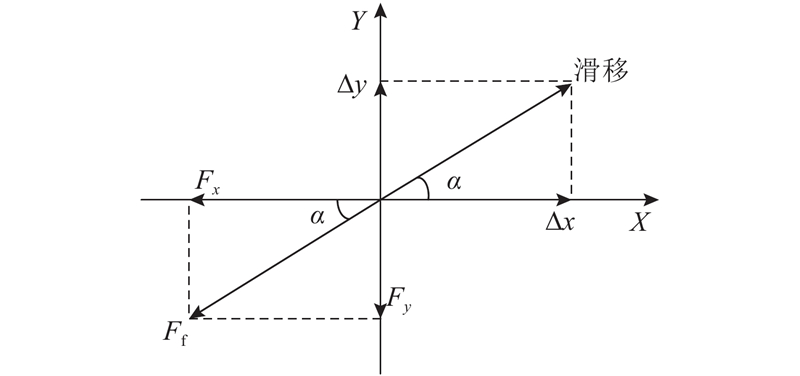
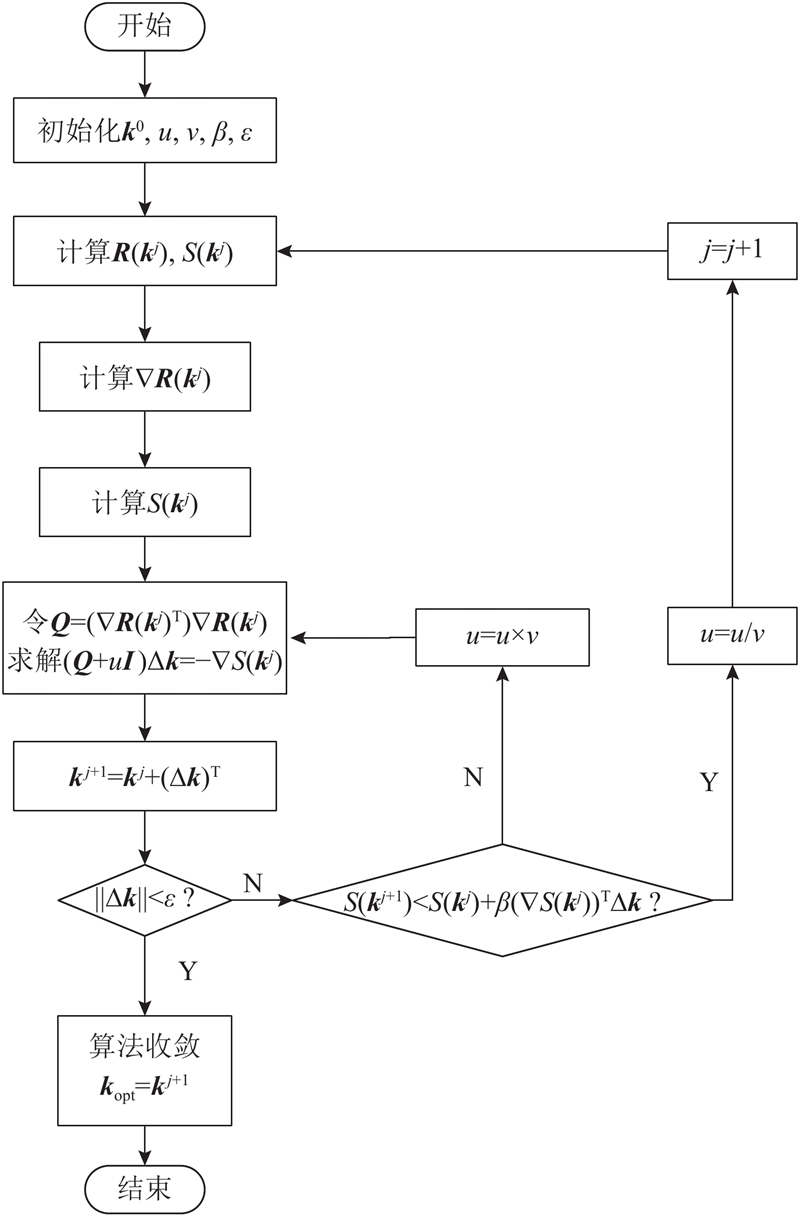
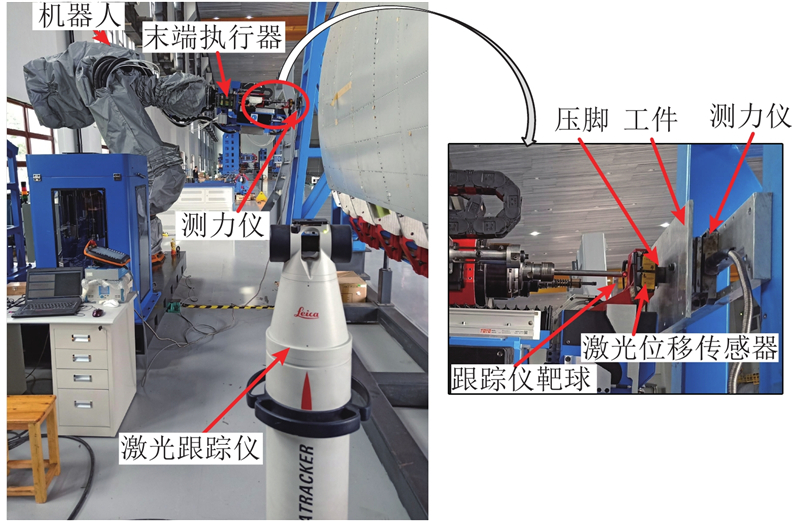
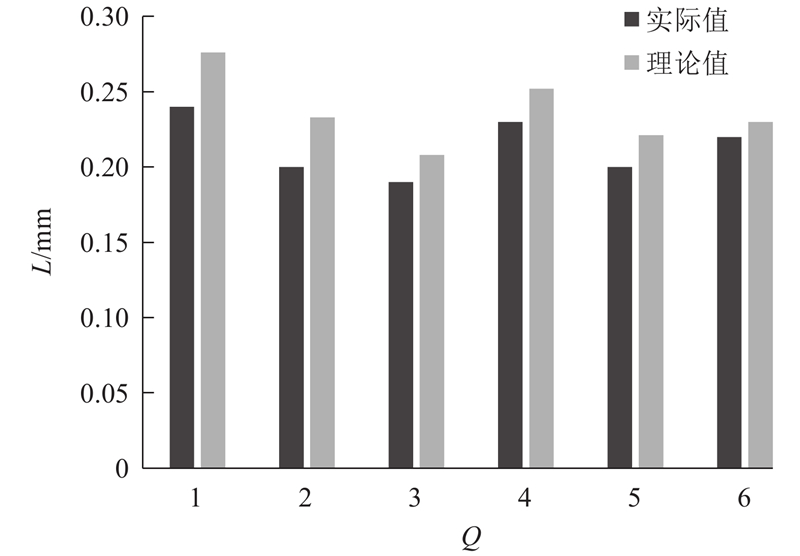
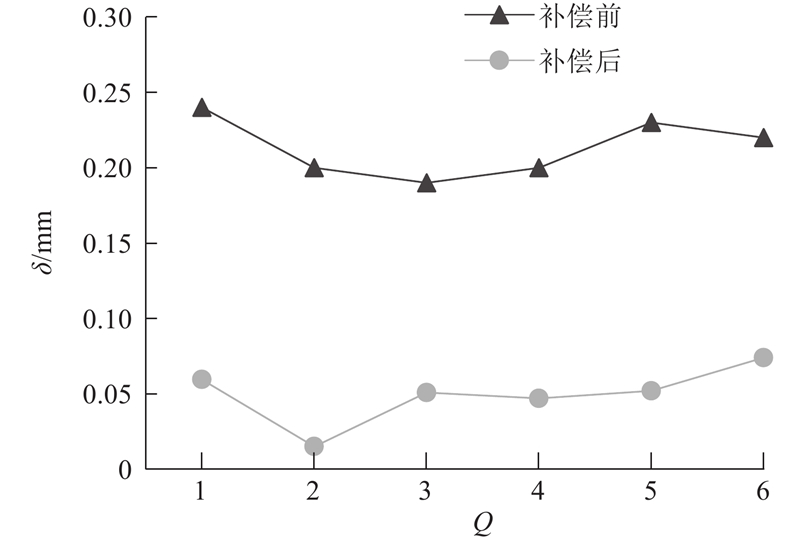
Abstract The industrial robot deforms under the pressure force of the pressure foot, resulting that the pressure foot slides on the workpiece surface. A robot stiffness model under the constraint of pressure foot was proposed, and the robot deformation was predicted and compensated with the model, in order to solve the above problem and improve robot positioning accuracy. The kinematics model of robot was established based on the modified Denavit-Hartenberg method. On this basis, the coupling relationship between the translational deformation of the robot end and the pressure force of the pressure foot was studied, the robot stiffness model under the constraint of pressure foot was established, and the numerical values of six joint stiffness of the robot were obtained through the joint stiffness identification experiment based on the L-M algorithm. The stiffness model was used to predict the translational deformation of the robot end at different hole positions under certain pressure force, and the theoretical hole positions were compensated off-line. Experimental results show that the average position error of the robot decreases from 0.22 mm to 0.05 mm in robotic drilling with the proposed compensation method, satisfying the requirement of positioning accuracy.
|
|
Received: 28 August 2019
Published: 28 August 2020
|
|
|
|
Corresponding Authors:
Hui-yue DONG
E-mail: zju_gyj@zju.edu.cn;donghuiyue@zju.edu.cn
|
压脚压紧力作用下的机器人变形预测和补偿
针对工业机器人在压脚压紧力作用下由于结构变形所引起的压脚沿工件表面滑移的问题,提出压脚约束下的机器人刚度模型,并基于该模型对机器人变形进行预测和补偿,以提高机器人制孔的定位精度. 基于改进的Denavit-Hartenberg方法建立机器人运动学模型;在此基础上,通过研究机器人末端平移变形与压脚压紧力之间的相互耦合关系,建立压脚约束下的机器人刚度模型,通过基于L-M算法的关节刚度辨识实验获得机器人6个关节刚度的具体数值;应用该刚度模型预测一定压脚压紧力作用下不同孔位的机器人末端平移变形,并对理论孔位信息进行离线补偿. 试验结果表明,在采用上述方法补偿机器人滑移变形后,机器人制孔的平均位置误差由原先的0.22 mm降低到0.05 mm,满足机器人自动化制孔定位精度要求.
关键词:
工业机器人,
刚度模型,
压脚,
关节刚度辨识,
误差补偿
|
|
| [1] |
毕运波, 李永超, 顾金伟, 等 机器人自动化制孔系统[J]. 浙江大学学报: 工学版, 2014, 48 (8): 1427- 1433
BI Yun-bo, LI Yong-chao, GU Jin-wei, et al Robotic automatic drilling system[J]. Journal of Zhejiang University: Engineering Science, 2014, 48 (8): 1427- 1433
|
|
|
| [2] |
DONG S, ZHENG K, LI W H Stability of lateral vibration in robotic rotary ultrasonic drilling[J]. International Journal of Mechanical Sciences, 2018, 145 (9): 346- 352
|
|
|
| [3] |
GARNIER S, SUBRIN K, WAIYAGAN K Modelling of robotic drilling[J]. Procedia CIRP, 2017, 58: 416- 421
doi: 10.1016/j.procir.2017.03.246
|
|
|
| [4] |
GUO Y, DONG H, KE Y Stiffness-oriented posture optimization in robotic machining applications[J]. Robotics and Computer-Integrated Manufacturing, 2015, 35: 69- 76
doi: 10.1016/j.rcim.2015.02.006
|
|
|
| [5] |
孙龙飞, 房立金, 梁风勇 新型工业机器人结构设计及其全域刚度预估方法[J]. 机器人, 2018, 40 (5): 99- 110
SUN Long-fei, FANG Li-jin, LIANG Feng-yong Structure design and global stiffness prediction method of a novel industrial robot[J]. Robot, 2018, 40 (5): 99- 110
|
|
|
| [6] |
QUINTANA G, CIURANA J Chatter in machining processes: a review[J]. International Journal of Machine Tools and Manufacture, 2011, 51 (5): 363- 376
doi: 10.1016/j.ijmachtools.2011.01.001
|
|
|
| [7] |
董辉跃, 吴杨宝, 郭英杰, 等 机器人精镗飞机交点孔的颤振分析与识别[J]. 浙江大学学报: 工学版, 2018, 52 (8): 92- 100
DONG Hui-yue, WU Yang-bao, GUO Ying-jie, et al Chatter analysis and identification in robotic fine boring of aircraft intersection holes[J]. Journal of Zhejiang University: Engineering Science, 2018, 52 (8): 92- 100
|
|
|
| [8] |
毕树生, 梁杰, 战强, 等 机器人技术在航空工业中的应用[J]. 航空制造技术, 2009, (4): 34- 39
BI Shu-sheng, LIANG Jie, ZHAN Qiang, et al Applications of robotics in the aerospace industry[J]. Aeronautical Manufacturing Technology, 2009, (4): 34- 39
doi: 10.3969/j.issn.1671-833X.2009.04.001
|
|
|
| [9] |
曲巍崴, 董辉跃, 柯映林 机器人辅助飞机装配制孔中位姿精度补偿技术[J]. 航空学报, 2011, 32 (10): 1951- 1960
QU Wei-wei, DONG Hui-yue, KE Ying-lin Pose accuracy compensation technology in robot-aided aircraft assembly drilling process[J]. Acta Aeronautica et Astronautica Sinica, 2011, 32 (10): 1951- 1960
|
|
|
| [10] |
董辉跃, 周华飞, 尹富成 机器人自动制孔中绝对定位误差的分析与补偿[J]. 航空学报, 2014, 36 (7): 2475- 2484
DONG Hui-yue, ZHOU Hua-fei, YIN Fu-cheng Analysis and compensation for absolute positioning error of robot in automatic drilling[J]. Acta Aeronautica et Astronautica Sinica, 2014, 36 (7): 2475- 2484
|
|
|
| [11] |
ZHU W, MEI B, YAN G, et al Measurement error analysis and accuracy enhancement of 2D vision system for robotic drilling[J]. Robotics and Computer-Integrated Manufacturing, 2014, 30 (2): 160- 171
doi: 10.1016/j.rcim.2013.09.014
|
|
|
| [12] |
费少华, 方强, 孟祥磊, 等 基于压脚位移补偿的机器人制孔锪窝深度控制[J]. 浙江大学学报: 工学版, 2012, 46 (7): 6- 10
FEI Shao-hua, FANG Qiang, MENG Xiang-lei, et al Countersink depth control of robot drilling based on pressure foot displacement compensation[J]. Journalof Zhejiang University: Engineering Science, 2012, 46 (7): 6- 10
|
|
|
| [13] |
OLSSON T, HAAGE M, KIHLMAN H, et al Cost-efficient drilling using industrial robots with high-bandwidth force feedback[J]. Robotics and Computer-Integrated Manufacturing, 2010, 26 (1): 24- 38
doi: 10.1016/j.rcim.2009.01.002
|
|
|
| [14] |
SALISBURY J K. Active stiffness control of a manipulator in cartesian coordinates [C]// Proceedings of the 19th IEEE Conference on Decision and Control. Albuquerque: IEEE, 1980: 87-97.
|
|
|
| [15] |
CHEN S, KAO I Conservative congruence transformation for joint and cartesian stiffness, matrices of robotic hands and fingers[J]. The International Journal of Robotics Research, 2000, 19 (9): 835- 847
doi: 10.1177/02783640022067201
|
|
|
| [16] |
DUMAS C, STéPHANE C, SéBASTIEN G, et al Joint stiffness identification of six-revolute industrial serial robots[J]. Robotics and Computer-Integrated Manufacturing, 2011, 27 (4): 881- 888
doi: 10.1016/j.rcim.2011.02.003
|
|
|
| [17] |
BU Y, LIAO W, TIAN W, et al Stiffness analysis and optimization in robotic drilling application[J]. Precision Engineering, 2017, 49 (7): 388- 400
|
|
|
| [18] |
王旭, 李东升, 王明明 工业机器人大负载刚度辨识及误差补偿研究[J]. 机械传动, 2017, (5): 39- 42
WANG Xu, LI Dong-sheng, WANG Ming-ming Research of the stiffness identification and error compensationof industrial robot under heavy load[J]. Mechanical Transmission, 2017, (5): 39- 42
|
|
|
| [19] |
ZHANG X, CHEN Y, CHEN Y, et al. Stiffness identification for serial robot manipulator based on uncertainty approach [C]// International Conference on Intelligent Robotics and Applications. Berlin: Springer, 2011.
|
|
|
| [20] |
YANG K, YANG W, CHENG G, et al A new methodology for joint stiffness identification of heavy duty industrialrobots with the counterbalancing system[J]. Robotics and Computer-Integrated Manufacturing, 2018, 53: 58- 71
doi: 10.1016/j.rcim.2018.03.001
|
|
|
| [21] |
曲巍崴, 侯鹏辉, 杨根军, 等 机器人加工系统刚度性能优化研究[J]. 航空学报, 2013, 34 (12): 2823- 2832
QU Wei-wei, HOU Peng-hui, YANG Gen-jun, et al Research on the stiffness performance for robot machining systems[J]. Acta Aeronautica et Astronautica Sinica, 2013, 34 (12): 2823- 2832
|
|
|
| [22] |
熊有伦, 丁汉, 刘恩沧. 机器人学[M]. 北京: 机械工业出版社, 1993.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|