|
|
|
| Active adaptive online trajectory prediction for robotic grinding on surface without prior model |
Wan-jin GUO1,2,3( ),Wu-duan ZHAO1,Su-yang YU1,Li-jun ZHAO2,4,Chu-qing CAO3,4 ),Wu-duan ZHAO1,Su-yang YU1,Li-jun ZHAO2,4,Chu-qing CAO3,4 |
1. Key Laboratory of Road Construction Technology and Equipment, Ministry of Education, Chang’an University, Xi’an 710064, China
2. State Key Laboratory of Robotics and System, Harbin Institute of Technology, Harbin 150001, China
3. Post-Doctoral Research Center, Wuhu HIT Robot Technology Research Institute Co. Ltd, Wuhu 241007, China
4. Yangtze River Delta HIT Robot Technology Research Institute, Wuhu 241007, China |
|
|
|
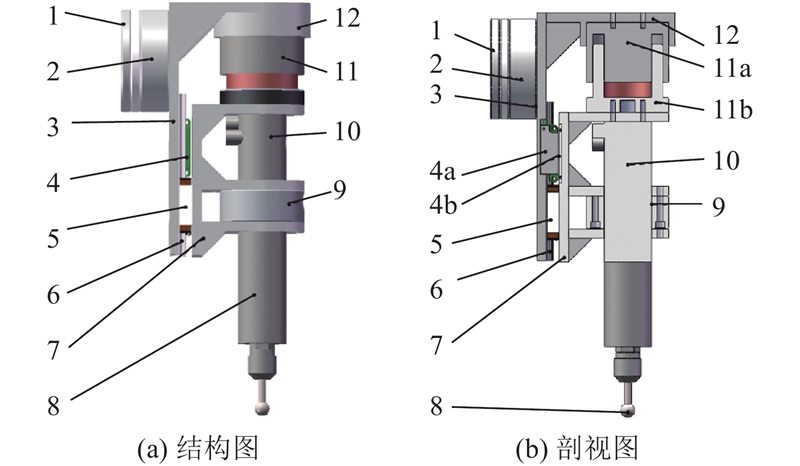
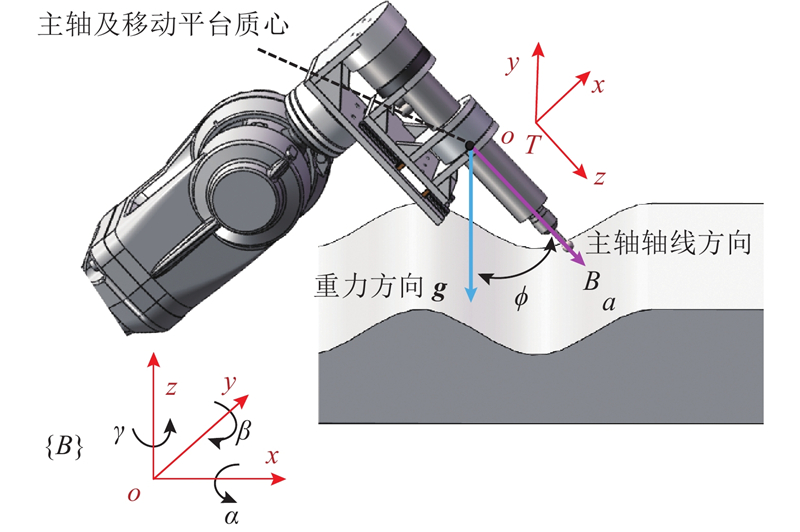
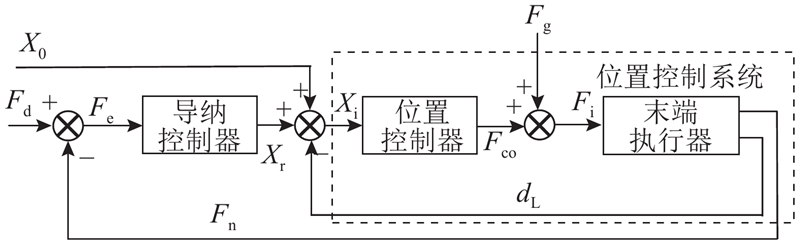
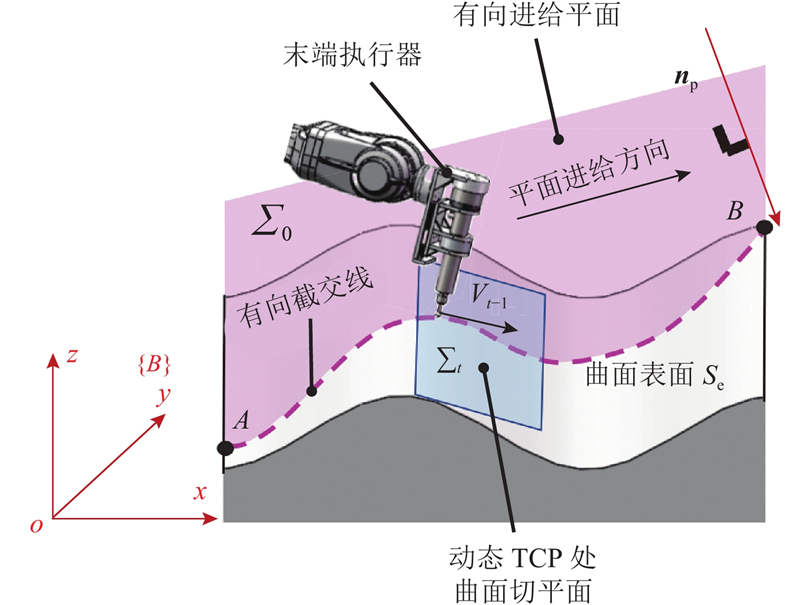
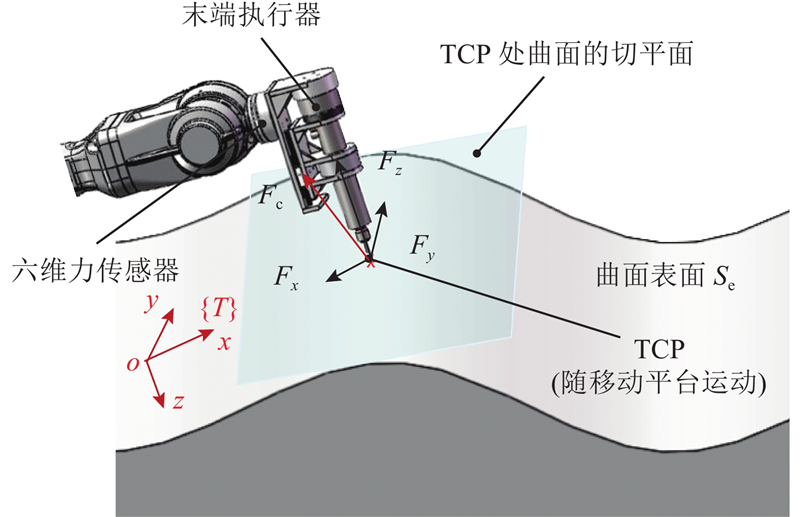
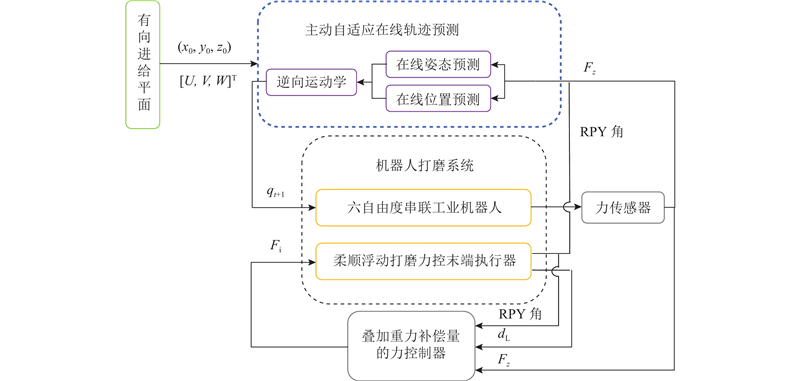
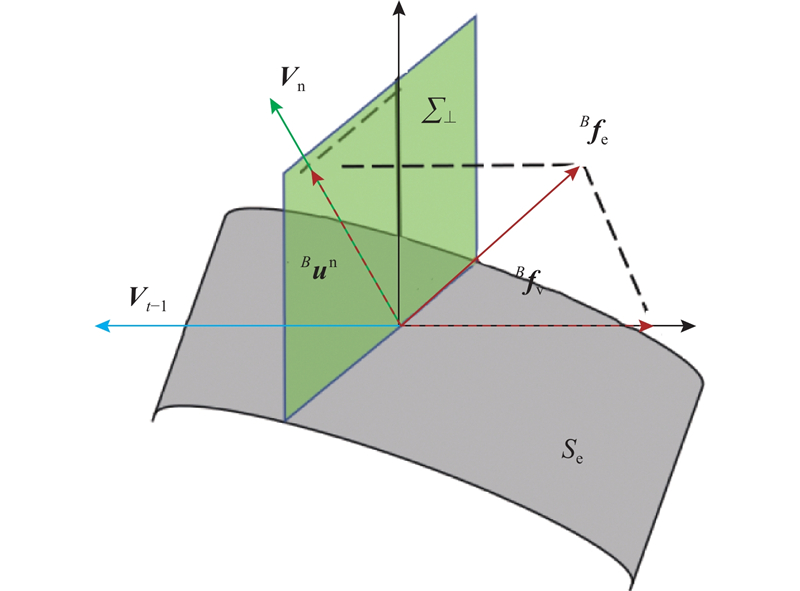
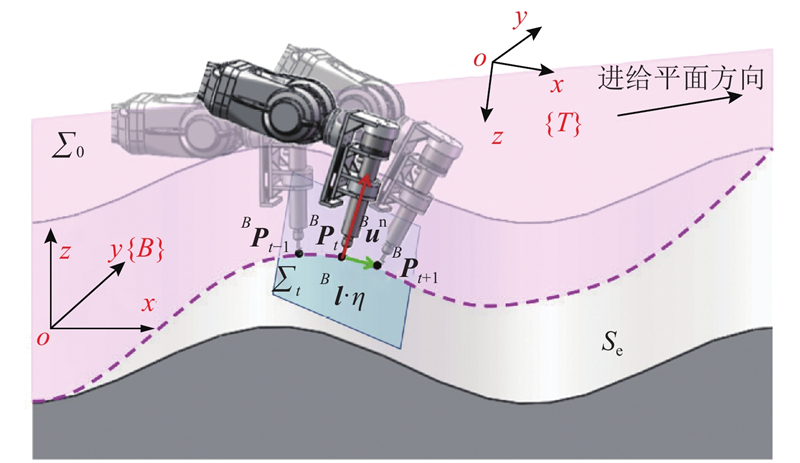
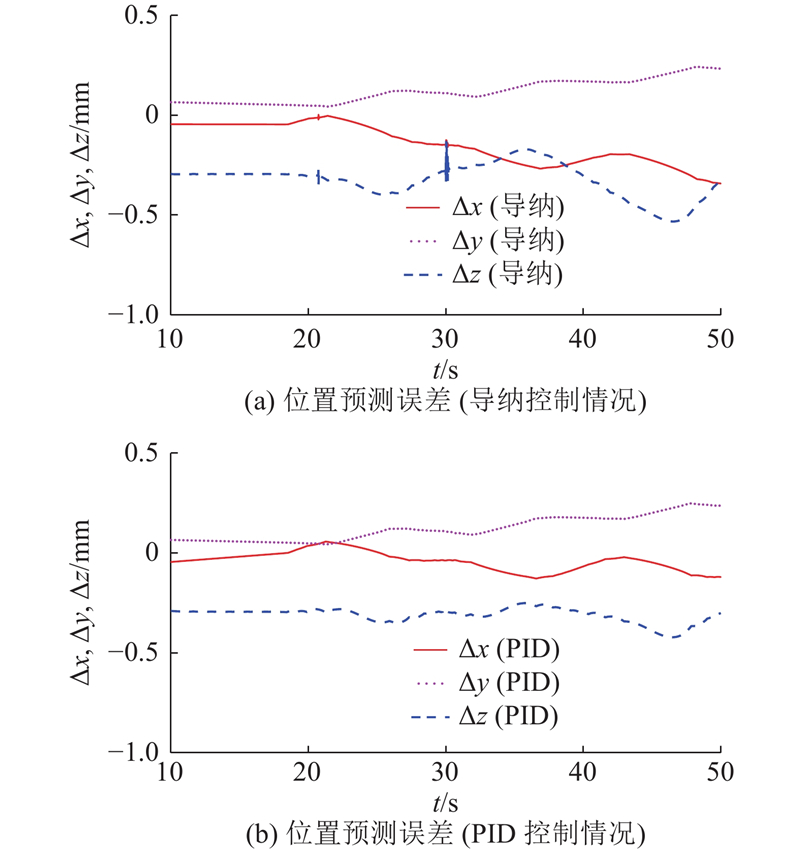
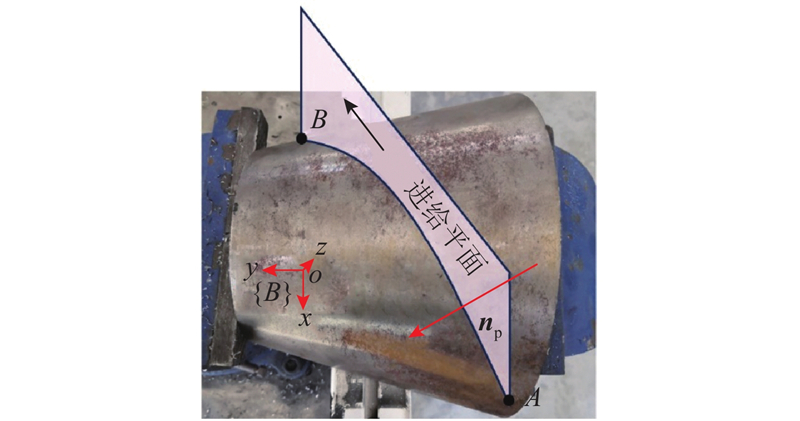
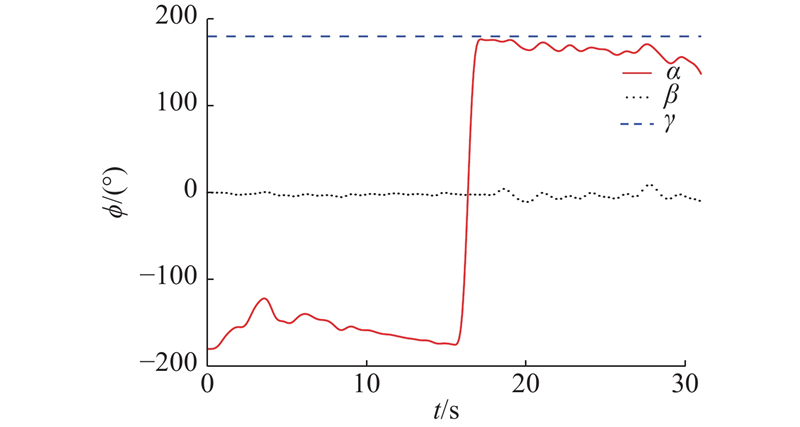
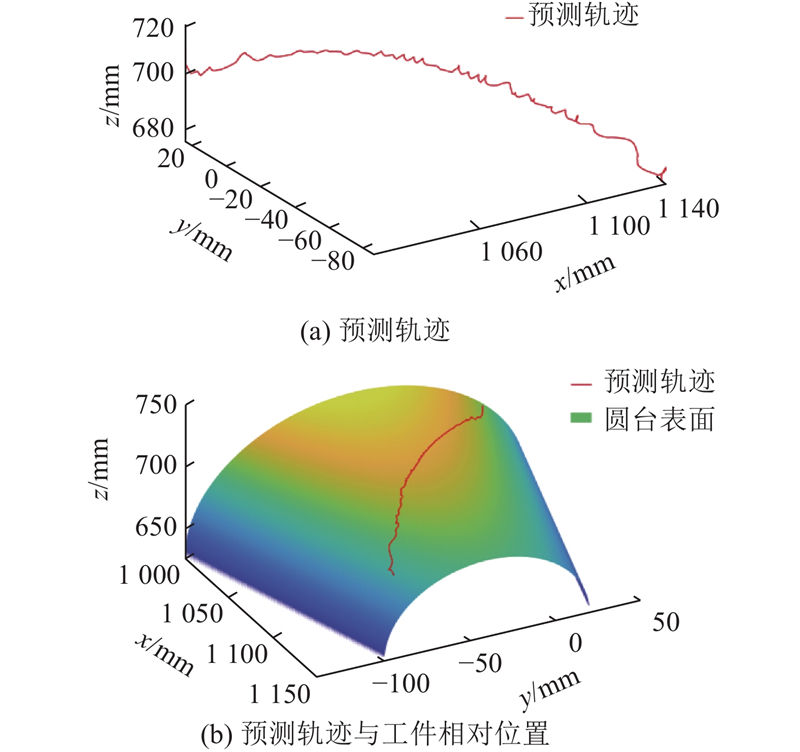
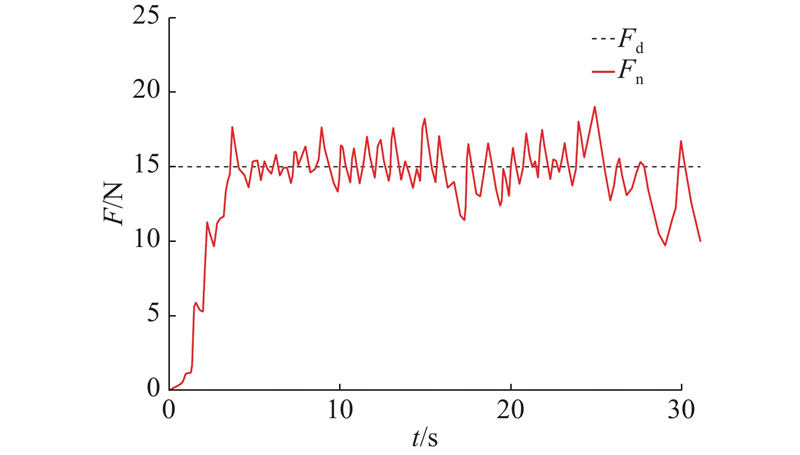
Abstract A compliant floating grinding force-controlled end-effector was designed, in order to solve the problem of the insufficient compliance of industrial robot grinding. Also, an active adaptive online trajectory prediction method of robotic grinding for the workpiece surface without a prior model was proposed to address the poor adaptability problem in robotic grinding trajectory prediction for this kind of surface. The direction of the surface normal is predicted by the proposed method according to the contact state between the grinding tool and the workpiece, and the interception line of the directed feed plane and the surface tangent plane is used as the feed guide, the pose of the end-effector is obtained adaptively, so that the surface normal of the end-effector is actively tracked by the axis of the spindle in real time, and the active adaptive online trajectory prediction is implemented for the curved workpiece without a prior model. The effectiveness of the proposed method was verified by simulation analysis and robotic experiment. The maximum comprehensive position error and the surface normal tracking error were 0.506 mm and 4.912°, respectively. The proposed method can provide an online trajectory prediction method for robotic grinding on surface workpieces without the prior model.
|
|
Received: 09 November 2022
Published: 31 August 2023
|
|
|
| Fund: 国家自然科学基金资助项目(52275005);中央高校基本科研业务费专项资金资助项目(300102253201);中国博士后科学基金资助项目(2022M722435);哈尔滨工业大学机器人技术与系统国家重点实验室开放研究资助项目(SKLRS-2020-KF-08);安徽省教育厅科学研究重点资助项目(KJ2020A0364) |
无先验模型曲面的机器人打磨主动自适应在线轨迹预测方法
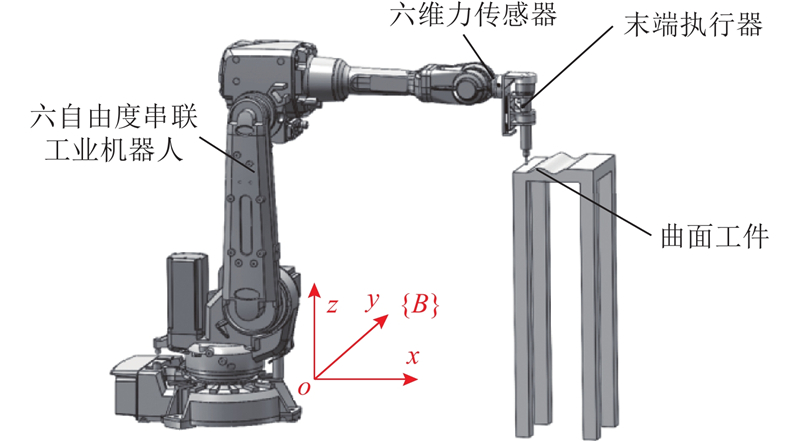
为了解决工业机器人打磨的作业柔顺性不足问题,设计了机器人柔顺浮动打磨力控末端执行器. 为了解决无先验模型曲面工件的机器人打磨轨迹自适应性较差的问题,提出无先验模型曲面的机器人打磨主动自适应在线轨迹预测方法. 该方法根据打磨工具与工件的接触状态预测曲面法线方向,以有向进给平面与曲面切平面的截交线作为进给导向,自适应在线预测机器人打磨系统末端执行器的位姿,使末端执行器主轴轴线实时主动跟踪曲面法线,实现对无先验模型曲面工件的机器人打磨轨迹的主动自适应在线预测. 通过仿真分析和实验验证了所提出方法的有效性,最大综合位置预测误差与曲面法线跟踪误差分别为0.506 mm和4.912°. 所提出方法可以为无先验模型曲面工件的机器人打磨提供在线轨迹预测.
关键词:
工业机器人,
无先验模型曲面,
在线轨迹预测,
曲面法线跟踪,
机器人打磨
|
|
| [1] |
YANG Z W, XI F F, WU B A shape adaptive motion control system with application to robotic polishing[J]. Robotics and Computer-Integrated Manufacturing, 2005, 21 (4/5): 355- 367
|
|
|
| [2] |
LI W L, XIE H, ZHANG G, et al 3-D shape matching of a blade surface in robotic grinding applications[J]. IEEE/ASME Transactions on Mechatronics, 2016, 21 (5): 2294- 2306
doi: 10.1109/TMECH.2016.2574813
|
|
|
| [3] |
REN X Y, CHEN G D, WANG Z, et al. Polishing path planning based on point cloud[C]// Proceedings of the 2020 the 4th International Conference on Innovation in Artificial Intelligence (ICIAI 2020). Xiamen: Association for Computing Machinery, 2020: 222-228.
|
|
|
| [4] |
PRINCELY F L, SELVARAJ T Vision assisted robotic deburring of edge burrs in cast parts[J]. Procedia Engineering, 2014, 97: 1906- 1914
doi: 10.1016/j.proeng.2014.12.344
|
|
|
| [5] |
ZHEN X, SENG J C Y, SOMANI N. Adaptive automatic robot tool path generation based on point cloud projection algorithm[C]// 2019 24th IEEE International Conference on Emerging Technologies and Factory Automation (ETFA). Zaragoza: IEEE, 2019: 341-347.
|
|
|
| [6] |
ZHAN J M, YU S A new aspheric surfaces polishing by parallel orthogonality movement/force servomechanism[J]. Journal of Manufacturing Science and Engineering, 2011, 133 (3): 4004140
|
|
|
| [7] |
KIGUCHI K, FUKUDA T Position/force control of robot manipulators for geometrically unknown objects using fuzzy neural networks[J]. IEEE Transactions on Industrial Electronics, 2000, 47 (3): 641- 649
doi: 10.1109/41.847905
|
|
|
| [8] |
JEON S W, AHN D S, BAE H J, et al. Object contour following task based on integrated information of vision and force sensor[C]// 2007 International Conference on Control, Automation and Systems. Seoul: IEEE, 2007: 1040-1045.
|
|
|
| [9] |
LI J, GUAN Y S, CHEN H W, et al Real-time normal contact force control for robotic surface processing of workpieces without a priori geometric model[J]. The International Journal of Advanced Manufacturing Technology, 2022, 119 (3): 2537- 2551
|
|
|
| [10] |
OBA Y, KAKINUMA Y Simultaneous tool posture and polishing force control of unknown curved surface using serial-parallel mechanism polishing machine[J]. Precision Engineering, 2017, 49: 24- 32
doi: 10.1016/j.precisioneng.2017.01.006
|
|
|
| [11] |
PRESTON F The theory and design of plate glass polishing machines[J]. Journal of Glass Technology, 1927, 11 (44): 214- 256
|
|
|
| [12] |
孙逸翔, 陈卫东 基于运动预测和阻抗控制的未知受限机构操作[J]. 机器人, 2011, 33 (5): 563- 569
SUN Yi-xiang, CHEN Wei-dong Operating unknown constrained mechanisms based on motion prediction and impedance control[J]. Robot, 2011, 33 (5): 563- 569
|
|
|
| [13] |
MA Z, POO A-N, ANG JR M H, et al Design and control of an end-effector for industrial finishing applications[J]. Robotics and Computer-Integrated Manufacturing, 2018, 53: 240- 253
doi: 10.1016/j.rcim.2018.04.010
|
|
|
| [14] |
TIAN F J, LI Z G, LV C, et al Polishing pressure investigations of robot automatic polishing on curved surfaces[J]. The International Journal of Advanced Manufacturing Technology, 2016, 87 (1): 639- 646
|
|
|
| [15] |
葛吉民, 邓朝晖, 李尉, 等 机器人磨抛力柔顺控制研究进展[J]. 中国机械工程, 2021, 32 (18): 2217- 2230
GE Ji-min, DENG Zhao-hui, LI Wei, et al Research progresses of robot grinding and polishing force compliance controls[J]. China Mechanical Engineering, 2021, 32 (18): 2217- 2230
doi: 10.3969/j.issn.1004-132X.2021.18.011
|
|
|
| [16] |
LI J, GUAN Y S, CHEN H W, et al A high-bandwidth end-effector with active force control for robotic polishing[J]. IEEE Access, 2020, 8: 169122- 169135
doi: 10.1109/ACCESS.2020.3022930
|
|
|
| [17] |
MOHAMMAD A E K, HONG J, WANG D W Design of a force-controlled end-effector with low-inertia effect for robotic polishing using macro-mini robot approach[J]. Robotics and Computer-Integrated Manufacturing, 2018, 49: 54- 65
doi: 10.1016/j.rcim.2017.05.011
|
|
|
| [18] |
HOGAN N. Impedance control: an approach to manipulation[C]// 1984 American Control Conference. San Diego: IEEE, 1984: 304-313.
|
|
|
| [19] |
黄玲涛, 王彬, 倪水, 等 基于力传感器重力补偿的机器人柔顺控制研究[J]. 农业机械学报, 2020, 51 (3): 386- 393
HUANG Ling-tao, WANG Bin, Ni Shui, et al Robot compliant control based on force sensor gravity compensation[J]. Journal of Agricultural Machinery, 2020, 51 (3): 386- 393
doi: 10.6041/j.issn.1000-1298.2020.03.045
|
|
|
| [20] |
OTT C, MUKHERJEE R, NAKAMURA Y. Unified impedance and admittance control[C]// 2010 IEEE International Conference on Robotics and Automation. Anchorage: IEEE, 2010: 554-561.
|
|
|
| [21] |
曾令城, 李明富, 杨真真, 等 基于先验速度修正的工业机器人曲面跟踪柔顺控制[J]. 机械工程学报, 2022, 58 (1): 41- 51
ZENG Ling-cheng, LI Ming-fu, YANG Zhen-zhen, et al Compliant control of industrial robot surface tracking based on priori velocity correction[J]. Journal of Mechanical Engineering, 2022, 58 (1): 41- 51
|
|
|
| [22] |
JOHNSON K L One hundred years of Hertz contact[J]. Proceedings of the Institution of Mechanical Engineers, 1982, 196 (1): 363- 378
doi: 10.1243/PIME_PROC_1982_196_039_02
|
|
|
| [23] |
DING Y F, MIN X P, FU W W, et al Research and application on force control of industrial robot polishing concave curved surfaces[J]. Proceedings of the Institution of Mechanical Engineers, Part B: Journal of Engineering Manufacture, 2019, 233 (6): 1674- 1686
doi: 10.1177/0954405418802309
|
|
|
| [24] |
LI J, ZHU H F, ZHANG T, et al Automatic generation of auxiliary cutting paths based on sheet material semantic information[J]. The International Journal of Advanced Manufacturing Technology, 2020, 106 (9): 3787- 3797
|
|
|
| [25] |
郭万金. 复杂形状零部件打磨机器人研究[D]. 哈尔滨: 哈尔滨工业大学, 2017.
GUO Wan-jin. Research on robot manipulator for complex shaped parts deburring[D]. Harbin: Harbin Institute of Technology, 2017.
|
|
|
| [26] |
张铁, 肖蒙, 邹焱飚, 等 基于强化学习的机器人曲面恒力跟踪研究[J]. 浙江大学学报:工学版, 2019, 53 (10): 1865- 1873
ZHANG Tie, XIAO Meng, ZOU Yan-biao, et al Research on robot constant force control of surface tracking based on reinforcement learning[J]. Journal of Zhejiang University: Engineering Science, 2019, 53 (10): 1865- 1873
|
|
|
| [27] |
李琳, 肖佳栋, 张铁, 等 基于自适应迭代的机器人曲面恒力跟踪[J]. 北京航空航天大学学报, 2019, 45 (4): 641- 649
LI Lin, XIAO Jia-dong, ZHANG Tie, et al Constant-force curved-surface-tracking with robotic manipulator based on adaptive iterative algorithm[J]. Journal of Beijing University of Aeronautics and Astronautics, 2019, 45 (4): 641- 649
doi: 10.13700/j.bh.1001-5965.2018.0441
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|