|
|
|
| Segmented pneumatic soft actuator for rehabilitation training |
Cai-xia LIU1,2( ),Ting-ting PAN2,Yi-fan SUN2,Shuai LI2,Ping LIU2,Ying HUANG2,*() ),Ting-ting PAN2,Yi-fan SUN2,Shuai LI2,Ping LIU2,Ying HUANG2,*() |
1. School of Physics, Hefei University of Technology, Hefei 230601, China
2. School of Microelectronics, Hefei University of Technology, Hefei 230601, China |
|
|
|
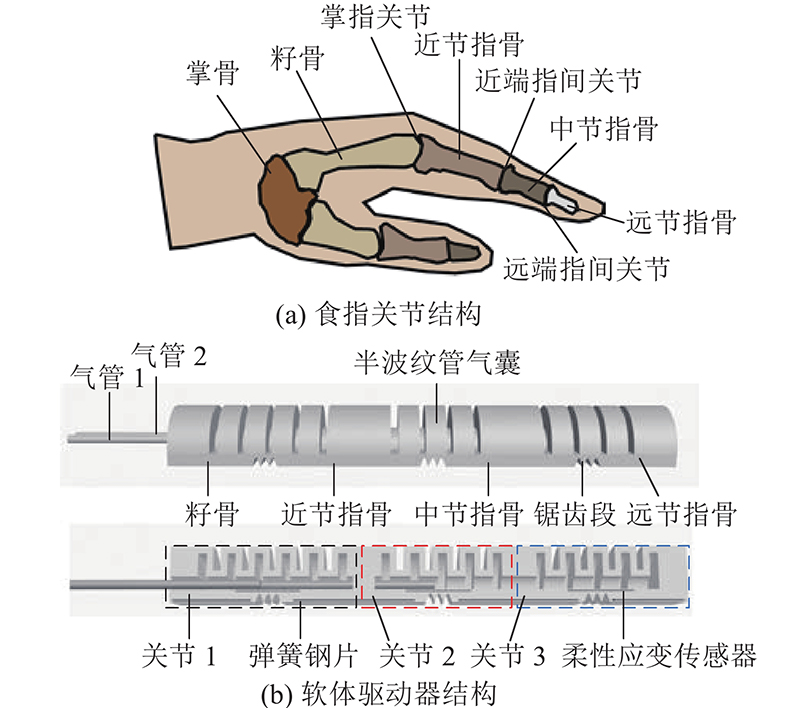
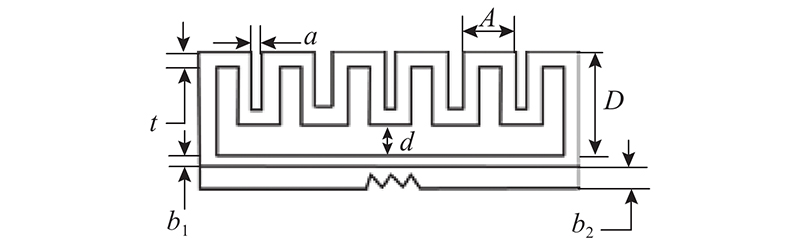
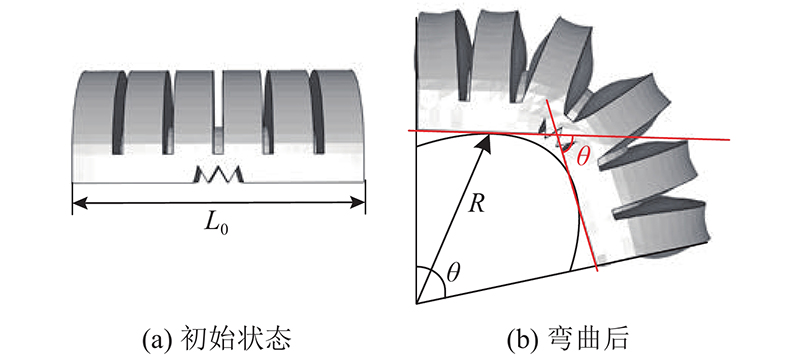
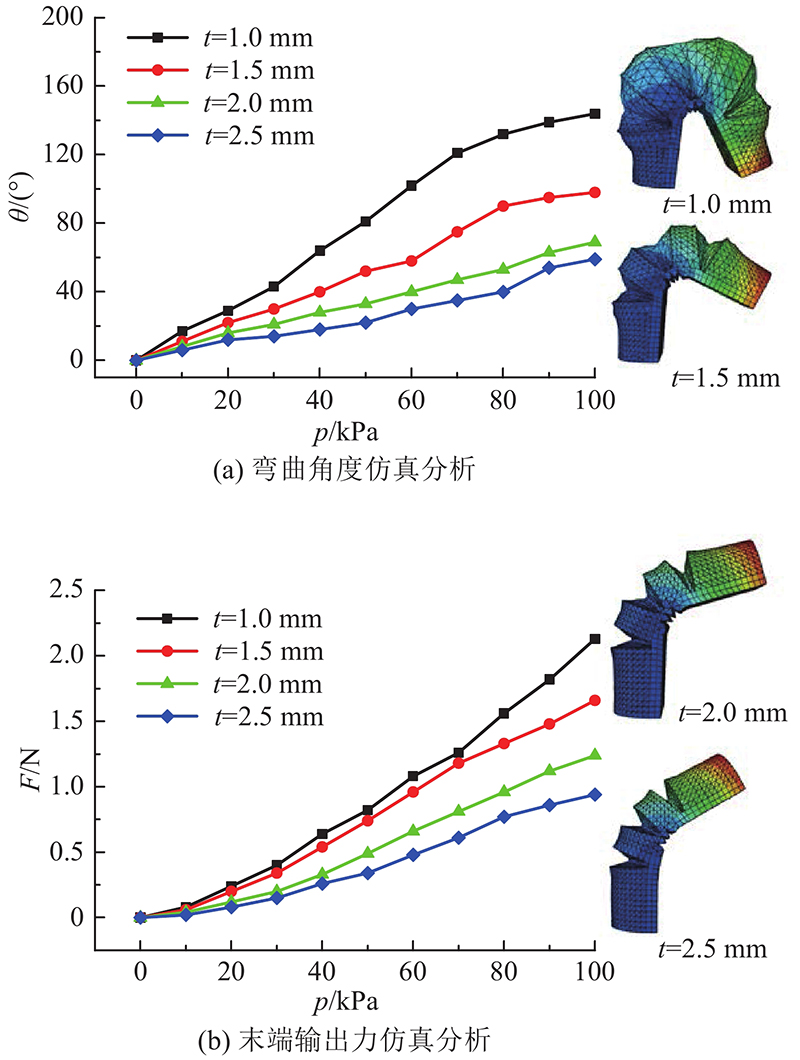
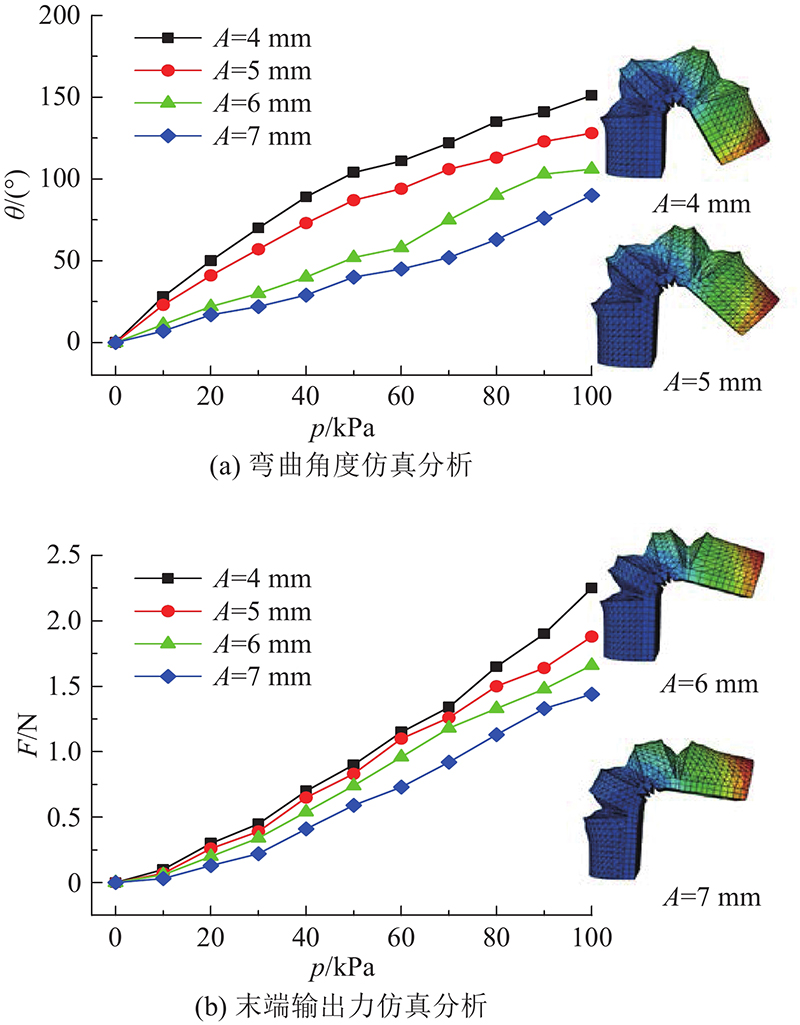
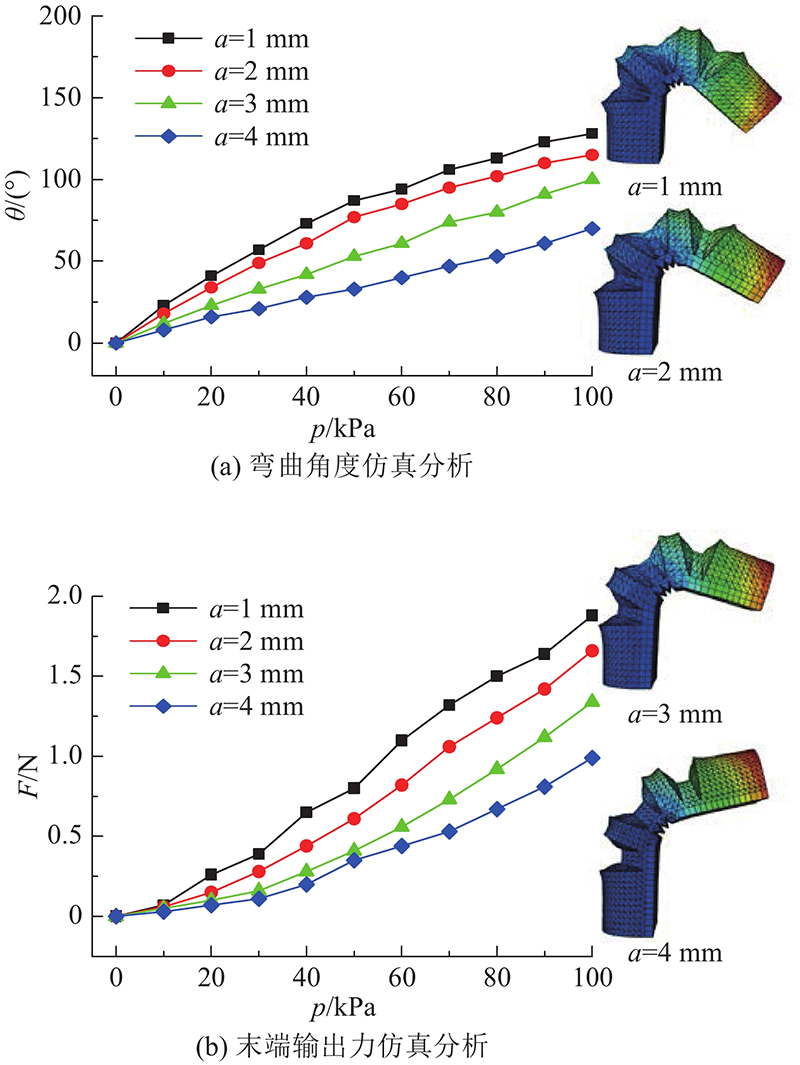
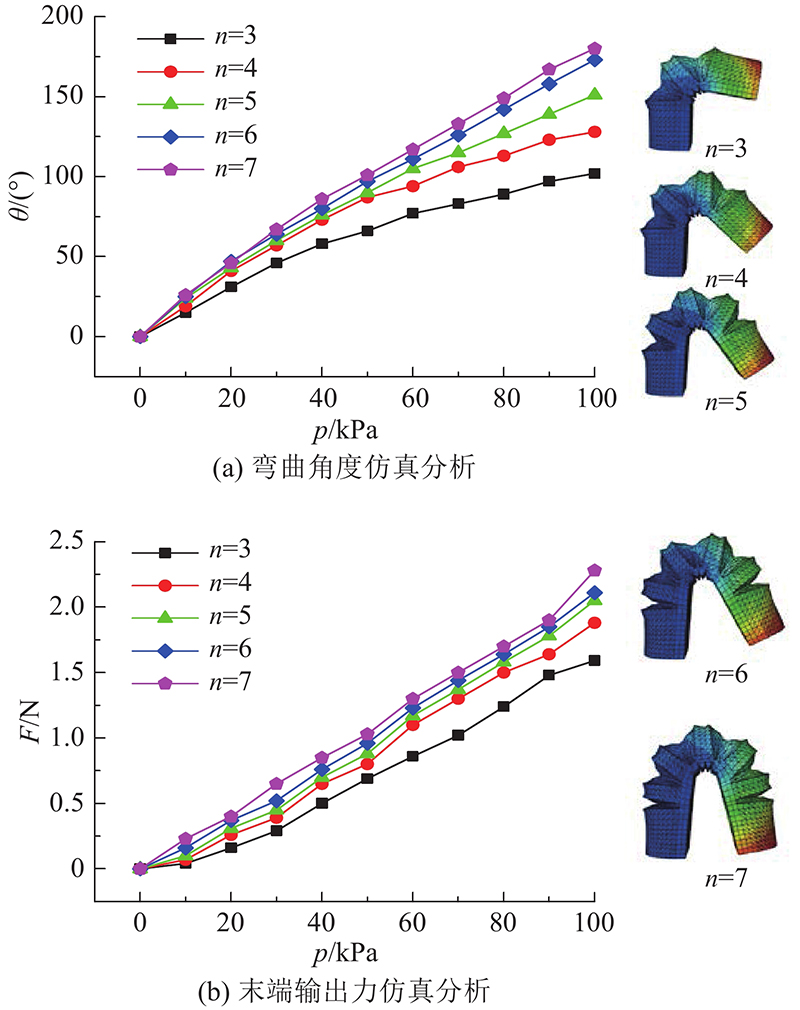
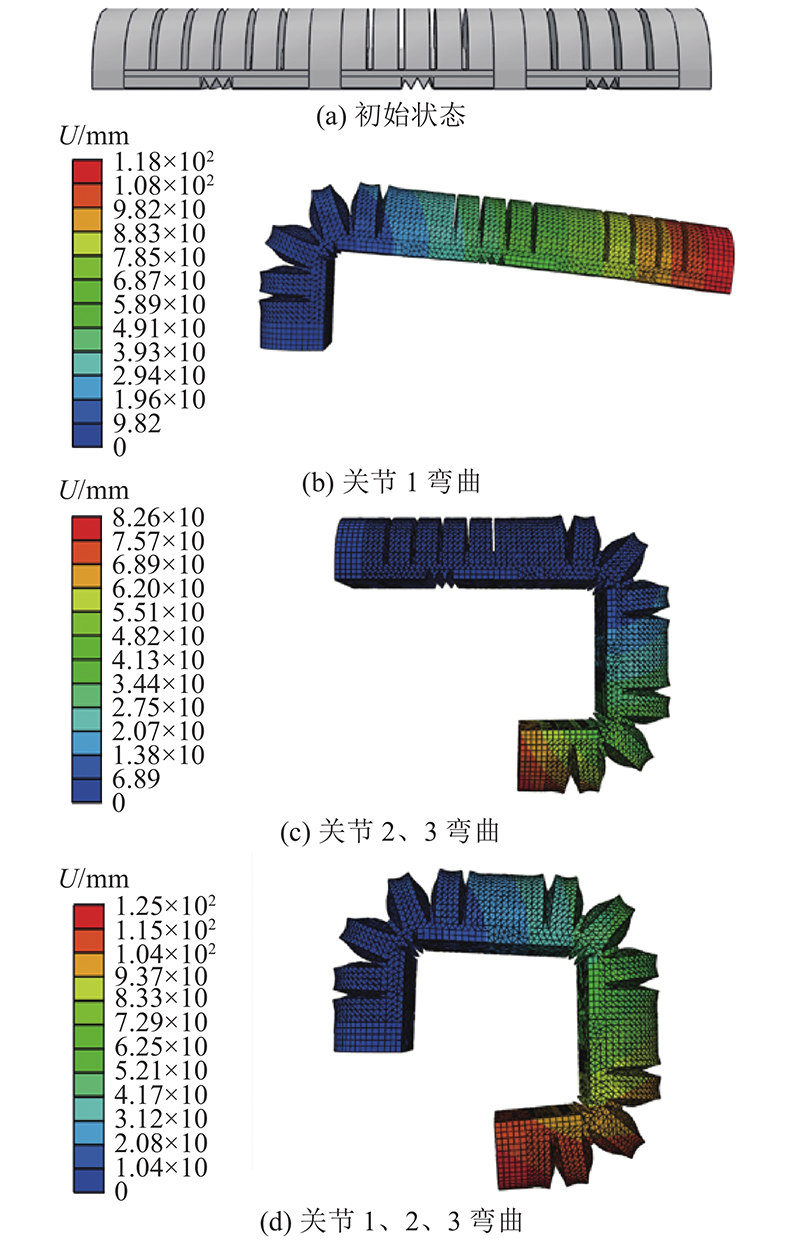
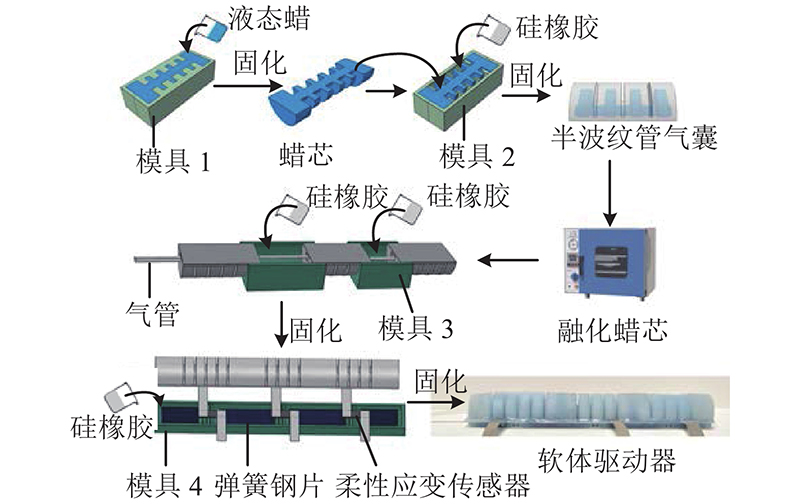
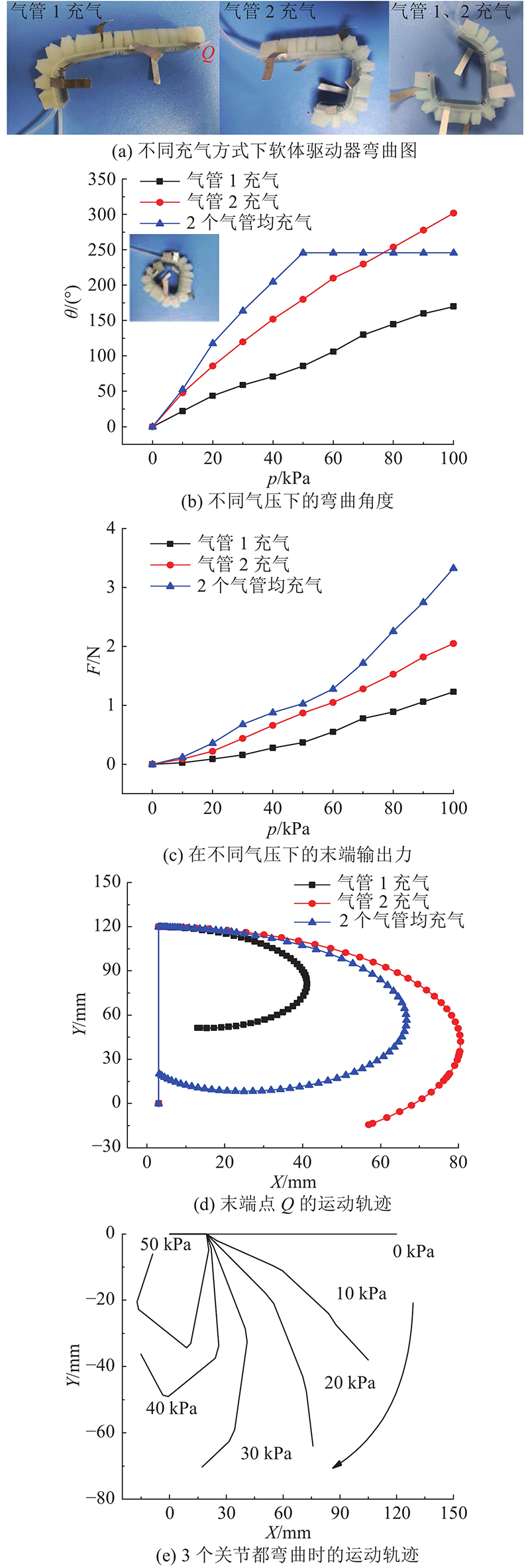
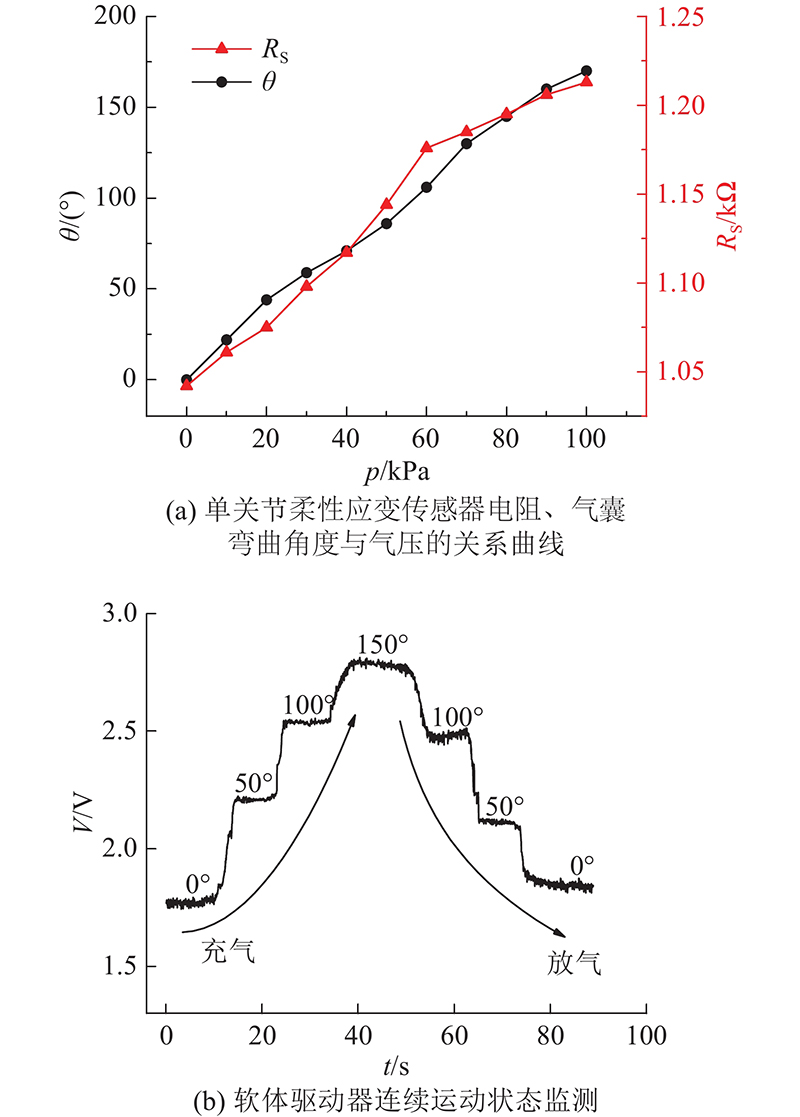
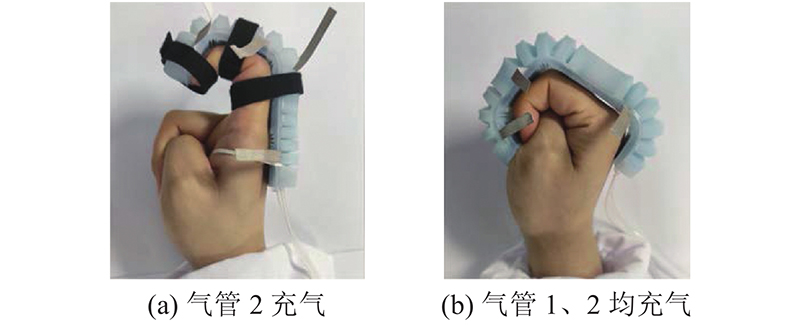
Abstract A segmented pneumatic soft actuator was designed based on the bionic principle for the problems of low fit, low flexibility, and inaccurate movement transmission of soft actuators in finger rehabilitation training. Segmented bending of the soft actuator was realized by three semi-bellows airbags with serrated structure, and the flexible strain sensors were embedded to achieve the proprioception of soft actuator. The bending deformation mathematical model of semi-bellows airbags were established, and the semi-bellows airbags were analyzed by finite element analysis. The influences of wall thickness, wave width, wave distance and ripple number on the airbags’ bending performance and terminal output force were studied, and the dimension parameters of soft actuator were selected. The soft actuator was fabricated using 3D printing technology and lost wax casting process. The characteristic test results of the soft actuator show that the maximum bending angle of the segmented soft actuator was 302°, and the terminal output force was 3.33 N, the finger was moved to do joint rehabilitation training, and the bending state of the soft actuator was monitored in real time through the flexible strain sensor.
|
|
Received: 02 March 2022
Published: 30 June 2022
|
|
|
| Fund: 浙江省科技厅“领雁”研发攻关计划项目(2022C03052);中央高校基本科研业务费专项资金资助项目(JZ2020HGTB0027,JZ2020HGQA0166) |
|
Corresponding Authors:
Ying HUANG
E-mail: hgdliucaixia@163.com;hf.hy@163.com
|
用于康复训练的分段式气动软体驱动器
针对手指康复训练中软体驱动器贴合度低、灵活性差、运动传递不准确等问题,基于仿生原理设计分段式气动软体驱动器. 通过3个具有锯齿结构半波纹管气囊实现软体驱动器的分段弯曲,嵌入柔性应变传感器实现软体驱动器本体感知. 建立半波纹管气囊弯曲变形数学模型,借助有限元分析对半波纹管气囊进行分析,研究壁厚、波纹宽度、波距和波纹数目对该气囊弯曲性能和末端输出力的影响,选取软体驱动器尺寸参数. 采用3D打印技术及失蜡铸造工艺,制作分段独立驱动的软体驱动器. 特性测试结果表明:分段式软体驱动器最大弯曲角度为302°,末端输出力为3.33 N,能够带动手指进行分关节康复训练,内嵌的柔性应变传感器可以实时监测软体驱动器弯曲状态.
关键词:
软体驱动器,
气动式,
有限元分析,
柔性应变传感器,
手指康复
|
|
| [1] |
国家心血管病中心. 中国心血管健康与疾病报告2019[R]. 北京: 科学出版社, 2020: 243-245.
|
|
|
| [2] |
贾杰 脑卒中后手功能康复现状[J]. 老年医学与保健, 2015, 21 (3): 129- 131
JIA Jie Status of hand functional rehabilitation after cerebral apoplexy[J]. Geriatrics and Health Care, 2015, 21 (3): 129- 131
|
|
|
| [3] |
SUSANTO E A, TONG R K Y, HO N S K Hand exoskeleton robot for assessing hand and finger motor impairment after stroke[J]. HKIE Transactions, 2015, 22 (2): 78- 87
doi: 10.1080/1023697X.2015.1038319
|
|
|
| [4] |
UEKI S, KAWASAKI H, ITO S, et al Development of a hand-assist robot with multi-degrees-of-freedom for rehabilitation therapy[J]. IEEE/ASME Transactions on Mechatronics, 2012, 17 (1): 136- 146
doi: 10.1109/TMECH.2010.2090353
|
|
|
| [5] |
吴枫, 韩亚丽, 李沈炎, 等 柔性仿生驱动器研究综述[J]. 现代制造工程, 2020, (7): 146- 156
WU Feng, HAN Ya-li, LI Shen-yan, et al Review of soft-bionic actuator[J]. Modern Manufacturing Engineering, 2020, (7): 146- 156
|
|
|
| [6] |
ISHIDA M, DROTMAN D, SHIH B, et al Morphing structure for changing hydrodynamic characteristics of a soft underwater walking robot[J]. IEEE Robotics and Automation Letters, 2019, 4 (4): 4163- 4169
doi: 10.1109/LRA.2019.2931263
|
|
|
| [7] |
POLYGERINOS P, LYNE S, WANG Z, et al. Towards a soft pneumatic glove for hand rehabilitation [C]// 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems. Tokyo: IEEE, 2013: 1512-1517.
|
|
|
| [8] |
KANG B B, CHOI H, LEE H, et al. Exo-glove poly II: a polymer-based soft wearable robot for the hand with a tendon-driven actuation system [J]. Soft Robotics. 2019, 6(2): 214-227.
|
|
|
| [9] |
XIANG C Q, YANG H, SUN Z Y, et al The design, hysteresis modeling and control of a novel SMA-fishing-line actuator[J]. Smart Material Structures, 2017, 26 (3): 037004
doi: 10.1088/1361-665X/aa5b03
|
|
|
| [10] |
YAP H K, LIM J H, NASRALLAH F, et al Design and preliminary feasibility study of a soft robotic glove for hand function assistance in stroke survivors[J]. Frontiers in Neuroscience, 2017, 11: 547
doi: 10.3389/fnins.2017.00547
|
|
|
| [11] |
CAPPELLO L, MEYER J T, GALLOWAY K C, et al Assisting hand function after spinal cord injury with a fabric-based soft robotic glove[J]. Journal of Neuroengineering and Rehabilitation, 2018, 15: 59
doi: 10.1186/s12984-018-0391-x
|
|
|
| [12] |
SUN Z S, GUO Z H, TANG W Design of wearable hand rehabilitation glove with soft hoop-reinforced pneumatic actuator[J]. Journal of Central South University, 2019, 26: 106- 119
doi: 10.1007/s11771-019-3986-x
|
|
|
| [13] |
POLYGERINOS P, WANG Z, GALLOWAY K C, et al Soft robotic glove for combined assistance and at-home rehabilitation[J]. Robotics and Autonomous Systems, 2015, 73: 135- 143
doi: 10.1016/j.robot.2014.08.014
|
|
|
| [14] |
YAP H K, LIM J H, NASRALLAH F, et al. A soft exoskeleton for hand assistive and rehabilitation application using pneumatic actuators with variable stiffness [C]// 2015 IEEE International Conference on Robotics and Automation (ICRA). Seattle: IEEE, 2015, 4967-4972.
|
|
|
| [15] |
WANG J B, FEI Y Q, PANG W Design, modeling, and testing of a soft pneumatic glove with segmented PneuNets bending actuators[J]. IEEE/ASME Transactions on Mechatronics, 2019, 24 (3): 990- 1001
doi: 10.1109/TMECH.2019.2911992
|
|
|
| [16] |
戴红. 人体运动学[M]. 北京: 人民卫生出版社, 2008: 103-115.
|
|
|
| [17] |
陈家照, 黄闽翔, 王学仁, 等 几种典型的橡胶材料本构模型及其适用性[J]. 材料导报, 2015, 29 (Suppl.1): 118- 120
CHEN jia-zhao, HUANG min-xiang, WANG xue-ren, et al Typical constitutive models of rubber materials and their ranges of application[J]. Materials Reports, 2015, 29 (Suppl.1): 118- 120
|
|
|
| [18] |
殷闻, 靳晓雄, 仝光 两种常用橡胶本构模型的有限元分析及其仿真[J]. 上海电机学院学报, 2010, 13 (4): 215- 218
YIN Wen, JIN Xiao-xiong, TONG Guang Finite element analysis of rubber constitutive models and simulation[J]. Journal of Shanghai Dianji University, 2010, 13 (4): 215- 218
doi: 10.3969/j.issn.2095-0020.2010.04.007
|
|
|
| [19] |
燕山, 王伟 橡胶类超弹性本构模型中材料参数的确定[J]. 橡胶工业, 2014, 61 (8): 453- 457
YAN Shan, WANG Wei Determination of material parameters for rubberlike hyperelastic constitutive models[J]. China Rubber Industry, 2014, 61 (8): 453- 457
doi: 10.3969/j.issn.1000-890X.2014.08.001
|
|
|
| [20] |
ALICI G, CANTY T, MUTLU R, et al Modeling and experimental evaluation of bending behavior of soft pneumatic actuators made of discrete actuation chambers[J]. Soft Robotics, 2018, 5 (1): 24- 35
doi: 10.1089/soro.2016.0052
|
|
|
| [21] |
齐开乐 软体弯曲驱动器设计与建模分析[J]. 洛阳理工学院学报: 自然科学版, 2021, 31 (3): 60- 65
QI kai-le Design and modeling analysis of a soft bending actuator[J]. Journal of Luoyang Institute of Science and Technology: Natural Science Edition, 2021, 31 (3): 60- 65
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|