|
|
|
| Human-machine shared obstacle avoidance method for wheelchair robot considering individual habit |
Yina WANG1( ),Chen CAO1,Jiaqi YANG1,Yanjun YU1,Guoqiang FU1,Shuoyu WANG2 ),Chen CAO1,Jiaqi YANG1,Yanjun YU1,Guoqiang FU1,Shuoyu WANG2 |
1. School of Electrical Engineering, Shenyang University of Technology, Shenyang 110870, China
2. School of Systems Engineering, Kochi University of Technology, Kochi 7820003, Japan |
|
|
|
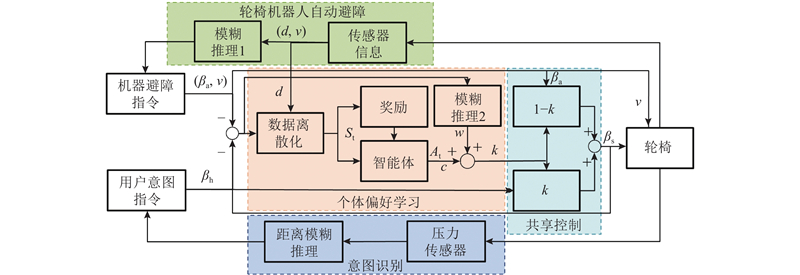
Abstract A dynamic reinforcement learning strategy was introduced to establish the correlation between individual operating habits and collision risk based on a triple-reward system in order to resolve the impact of individual operating habits on the shared motion control of intelligent wheelchair robots (WR). A fuzzy reinforcement learning state fusion-based shared control strategy was proposed, which could adapt to user behavior while ensuring safety. A distance fuzzy reasoning algorithm was employed to develop a direction intention recognition model based on seat pressure, which served as the foundation for establishing a human-machine shared control framework in order to achieve intelligent robot control. The current and predictive reward functions were established via the Gaussian function and deviation rate, respectively, focusing on the deviation between the user’s intended direction and the robot’s actual direction in order to estimate user operating habits. A task reward function was created according to boundary distance in order to predict human-machine safety. The correlation between user operating habits and safety was constructed by utilizing the fuzzy reinforcement learning strategy and the triple-reward system in order to dynamically adjust the user control weight within the shared control to adapt to individual habits. Then the precision and safety of human-machine shared control were enhanced. The effectiveness of the proposed algorithm was verified by experiments in a test environment.
|
|
Received: 13 December 2023
Published: 23 October 2024
|
|
|
| Fund: 国家自然科学基金资助项目(52175105);教育部春晖计划资助项目(HZKY20220415);辽宁省科技厅资助项目(2024MS107);辽宁省教育厅资助项目(JYTMS20231207). |
考虑个体习惯的轮椅机器人人机共享避障方法
为了避免个体操作习惯对智能轮椅机器人(WR)人机共享运动控制的影响,引入动态强化学习策略,基于三重奖励系统建立个体操作习惯与碰撞风险的关联特性,提出能够自适应用户行为及保证安全性的模糊强化学习状态融合式共享控制策略. 为了实现机器人的智能操控,采用距离型模糊推理算法建立基于座椅压力的方向意图识别模型和机器人人机共享控制框架. 面向用户意图方向与机器人实际方向的偏差度,分别基于高斯函数与偏差率建立当前奖励函数与预测奖励函数,以估计用户操作习惯. 基于边界距离建立任务奖励函数,以估计人机安全性. 基于模糊强化学习策略,利用三重奖励函数构建用户操作习惯与安全性的关联性,以动态调整共享控制中的用户控制权重,适应个体习惯,提高人机共享的操控精度和安全性. 在实验室搭建试验环境,验证了所提算法的有效性.
关键词:
智能轮椅机器人,
距离型模糊推理算法,
模糊强化学习,
个体习惯,
人机共享控制
|
|
| [1] |
OHARA E, WATANABE T, OISHI T, et al. Assistance control of wheelchair operation using active cast for the upper limb [C]// IEEE International Conference on Robotics and Automation . Shanghai: IEEE, 2011: 2223-2228.
|
|
|
| [2] |
CHALOEM T, YOKOTA S, HASHIMOTO H, et al. Oscillation suppression control for electric wheelchair using human body motion interface [C]// IEEE International Conference on Industrial Technology . Lyon: IEEE, 2018: 1991-1996.
|
|
|
| [3] |
LU T. A motion control method of intelligent wheelchair based on hand gesture recognition [C]// IEEE 8th Conference on Industrial Electronics and Applications . Melbourne: IEEE, 2013: 957-962.
|
|
|
| [4] |
NASIF S, KHAN M A G. Wireless head gesture controlled wheel chair for disable persons [C]// IEEE Region 10 Humanitarian Technology Conference . Dhaka: IEEE, 2017: 156-161.
|
|
|
| [5] |
ÖZLÜK Y, AKMAN-AYDIN E Fuzzy logic control of a head-movement based semi-autonomous human–machine interface[J]. Journal of Bionic Engineering, 2023, 20 (2): 645- 655
doi: 10.1007/s42235-022-00272-3
|
|
|
| [6] |
KAUR A Wheelchair control for disabled patients using EMG/EOG based human machine interface: a review[J]. Journal of Medical Engineering and Technology, 2021, 45 (1): 61- 74
doi: 10.1080/03091902.2020.1853838
|
|
|
| [7] |
张亚徽, 王斐, 李景宏, 等 基于稳态视觉诱发电位的智能轮椅半自主导航控制[J]. 机器人, 2019, 41 (5): 620- 627
ZHANG Yahui, WANG Fei, LI Jinghong, et al Semi-autonomous navigation control of intelligent wheelchair based on steady state visual evoked potential[J]. Robot, 2019, 41 (5): 620- 627
|
|
|
| [8] |
RECHY-RAMIREZ E J, HU H A flexible bio-signal based HMI for hands-free control of an electric powered wheelchair[J]. International Journal of Artificial Life Research, 2014, 4 (1): 59- 76
doi: 10.4018/ijalr.2014010105
|
|
|
| [9] |
JAMEEL H F, MOHAMMED S L, GHARGHAN S K. Wheelchair control system based on gyroscope of wearable tool for the disabled [C]// IOP Conference Series: Materials Science and Engineering . Baghdad: IOP Publishing, 2020, 745(1): 012091.
|
|
|
| [10] |
PAING M P, JUHONG A, PINTAVIROOJ C Design and development of an assistive system based on eye tracking[J]. Electronics, 2022, 11 (4): 535
doi: 10.3390/electronics11040535
|
|
|
| [11] |
HORI J, OHARA H, INAYOSHI S Control of speed and direction of electric wheelchair using seat pressure mapping[J]. Biocybernetics and Biomedical Engineering, 2018, 38 (3): 624- 633
doi: 10.1016/j.bbe.2018.04.007
|
|
|
| [12] |
FAN J, JIA S, LI X, et al. Motion control of intelligent wheelchair based on sitting postures [C]// IEEE International Conference on Mechatronics and Automation . Beijing: IEEE, 2011: 301-306.
|
|
|
| [13] |
KHALILULLAH K M I, OTA S, YASUDA T, et al Road area detection method based on DBNN for robot navigation using single camera in outdoor environments[J]. Industrial Robot: An International Journal, 2018, 45 (2): 275- 286
doi: 10.1108/IR-08-2017-0139
|
|
|
| [14] |
SEZER V An optimized path tracking approach considering obstacle avoidance and comfort[J]. Journal of Intelligent and Robotic Systems, 2022, 105 (1): 21
doi: 10.1007/s10846-022-01636-x
|
|
|
| [15] |
陈英龙, 宋甫俊, 张军豪, 等 基于临场感的遥操作机器人共享控制研究综述[J]. 浙江大学学报: 工学版, 2021, 55 (5): 831- 842
CHEN Yinglong, SONG Fujun, ZHANG Junhao, et al Telerobotic shared control strategy based on telepresence: a review[J]. Journal of Zhejiang University: Engineering Science, 2021, 55 (5): 831- 842
|
|
|
| [16] |
JAIN S, ARGALL B. Recursive Bayesian human intent recognition in shared-control robotics [C]// IEEE/RSJ International Conference on Intelligent Robots and Systems . Madrid: IEEE, 2018: 3905-3912.
|
|
|
| [17] |
NARAYANAN V K, SPALANZANI A, BABEL M. A semi-autonomous framework for human-aware and user intention driven wheelchair mobility assistance [C]// IEEE/RSJ International Conference on Intelligent Robots and Systems . Daejeon: IEEE, 2016: 4700-4707.
|
|
|
| [18] |
DENG X, YU Z L, LIN C, et al Self-adaptive shared control with brain state evaluation network for human-wheelchair cooperation[J]. Journal of Neural Engineering, 2020, 17 (4): 045005
doi: 10.1088/1741-2552/ab937e
|
|
|
| [19] |
EZEH C, TRAUTMAN P, DEVIGNE L, et al. Probabilistic vs linear blending approaches to shared control for wheelchair driving [C]// International Conference on Rehabilitation Robotics . London: IEEE, 2017: 835-840.
|
|
|
| [20] |
JOHANNINK T, BAHL S, NAIR A, et al. Residual reinforcement learning for robot control [C]// International Conference on Robotics and Automation . Montreal: IEEE, 2019: 6023-6029.
|
|
|
| [21] |
XI L, SHINO M Shared control design methodologies of an electric wheelchair for individuals with severe disabilities using reinforcement learning[J]. Journal of Advanced Simulation in Science and Engineering, 2020, 7 (2): 300- 319
doi: 10.15748/jasse.7.300
|
|
|
| [22] |
WANG Y, WANG S A new directional-intent recognition method for walking training using an omnidirectional robot[J]. Journal of Intelligent and Robotic Systems, 2017, 87 (2): 231- 246
doi: 10.1007/s10846-017-0503-z
|
|
|
| [23] |
LINDBLAD J, SLADOJE N Linear time distances between fuzzy sets with applications to pattern matching and classification[J]. IEEE Transactions on Image Processing, 2013, 23 (1): 126- 136
|
|
|
| [24] |
ZHANG D, WANG Y, LIU Z, et al Intelligent obstacle avoidance wheelchair based on fuzzy reasoning[J]. ICIC Express Letters, Part B: Applications, 2021, 12 (9): 831- 838
|
|
|
| [25] |
刘智敏, 叶宝林, 朱耀东, 等 基于深度强化学习的交通信号控制方法[J]. 浙江大学学报: 工学版, 2022, 56 (6): 1249- 1256
LIU Zhimin, YE Baolin, ZHU Yaodong, et al Traffic signal control method based on deep reinforcement learning[J]. Journal of Zhejiang University: Engineering Science, 2022, 56 (6): 1249- 1256
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|