|
|
|
| Motion control of quadruped robot based on model prediction |
Haipeng QIN1( ),Rui QIN2,Xiaofen SHI1,*(),Xiaoming ZHU2 ),Rui QIN2,Xiaofen SHI1,*(),Xiaoming ZHU2 |
1. School of Baili Mechanical Engineering, Lanzhou City University, Lanzhou 730070, China
2. Key Laboratory of Road Construction Technology and Equipment, Ministry of Education, Chang’an University, Xi'an 710064, China |
|
|
|
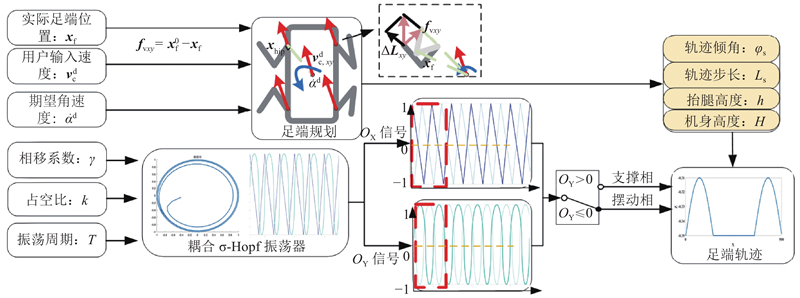
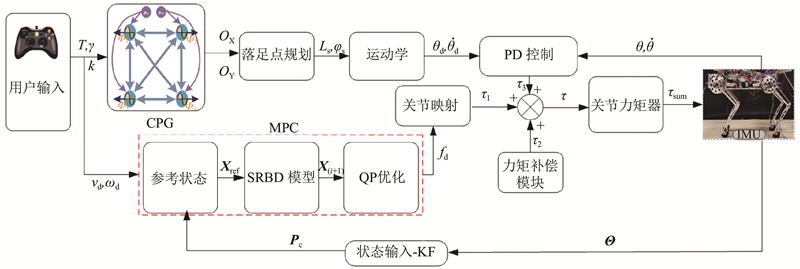
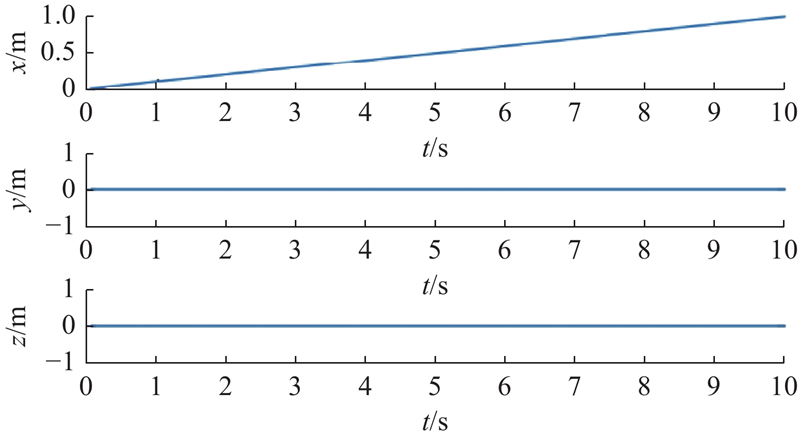
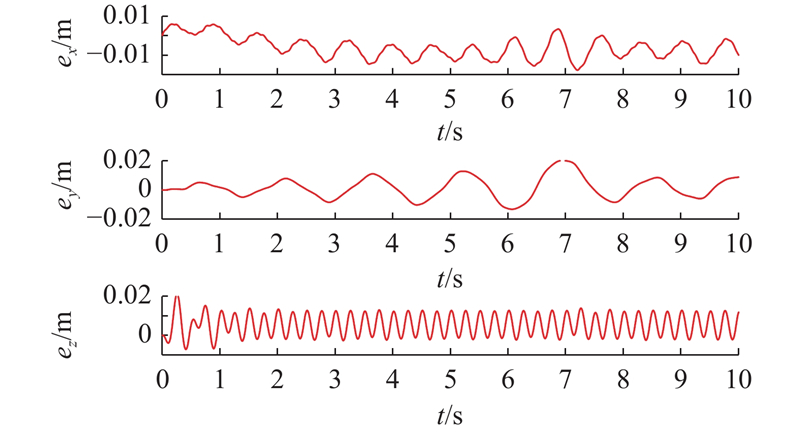
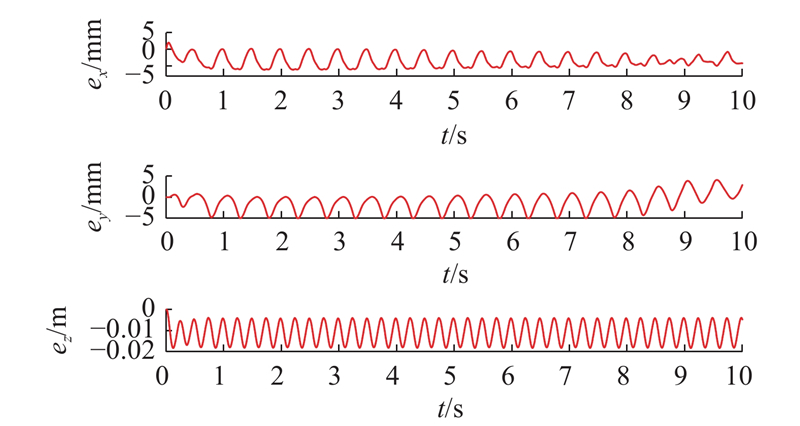
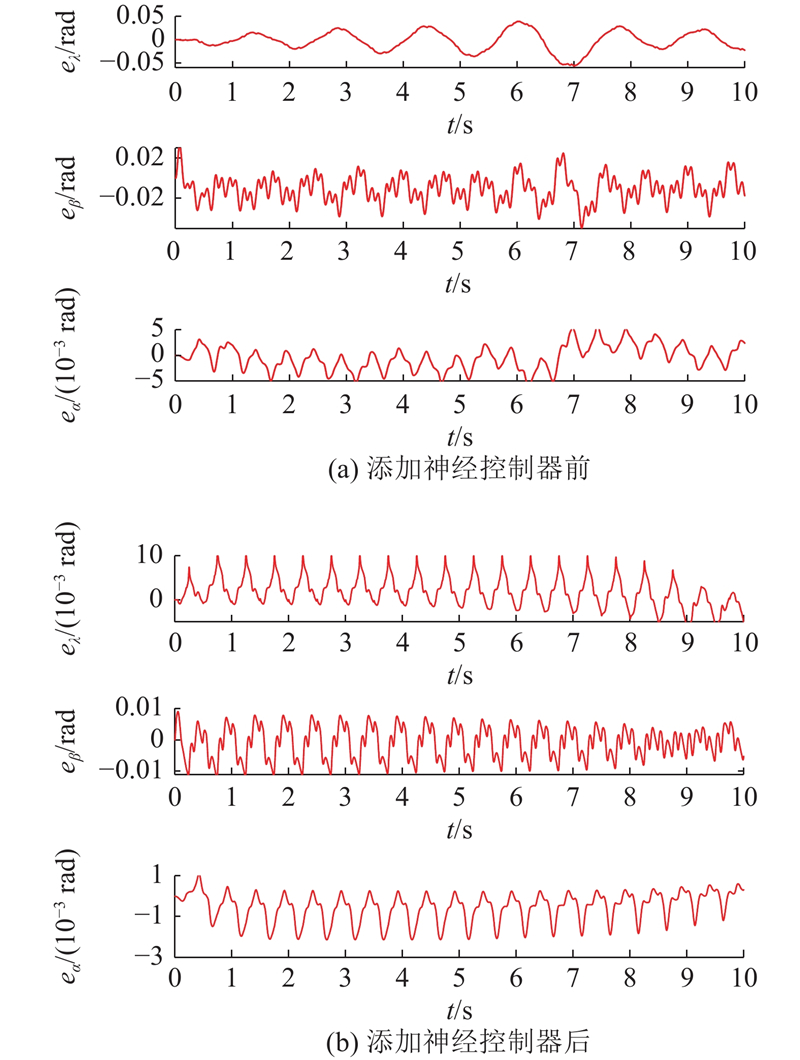
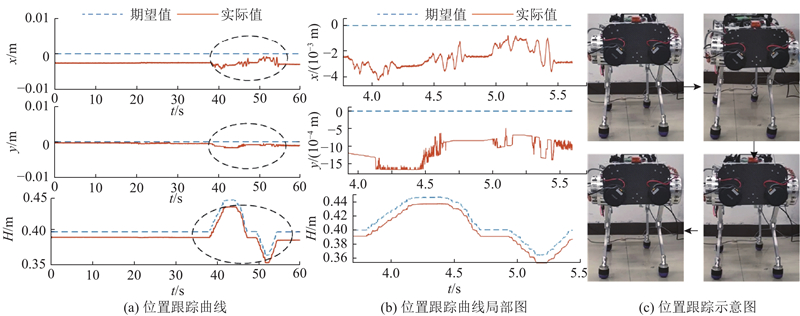
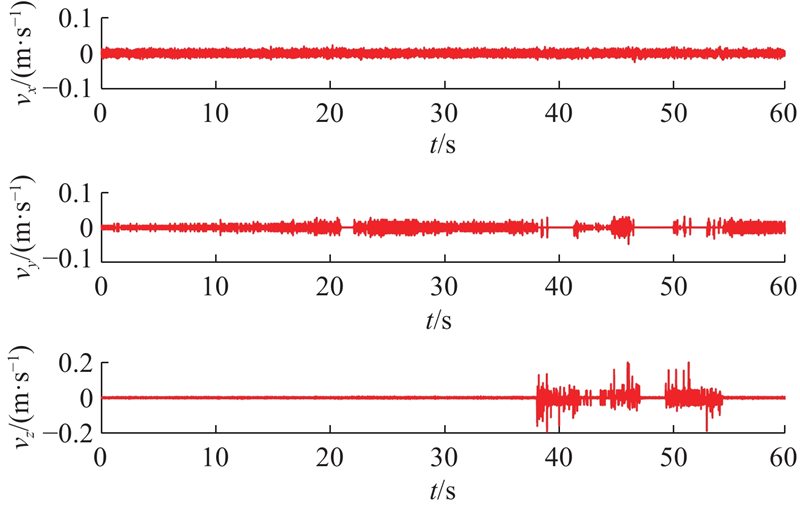
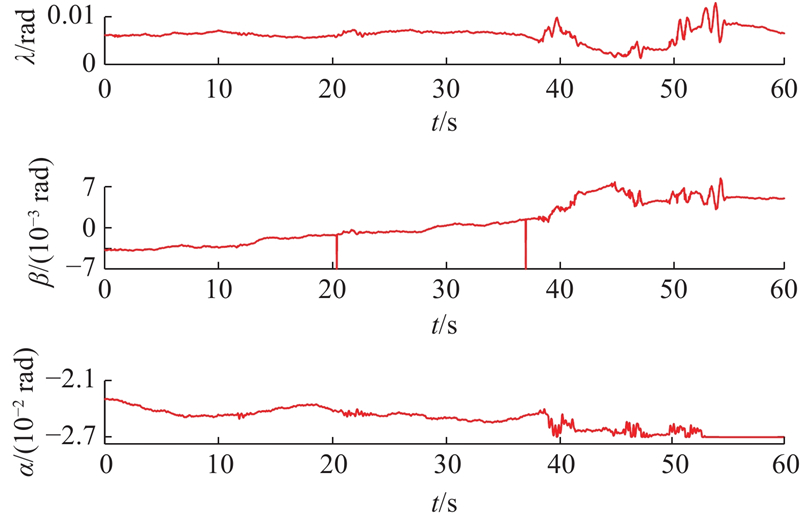
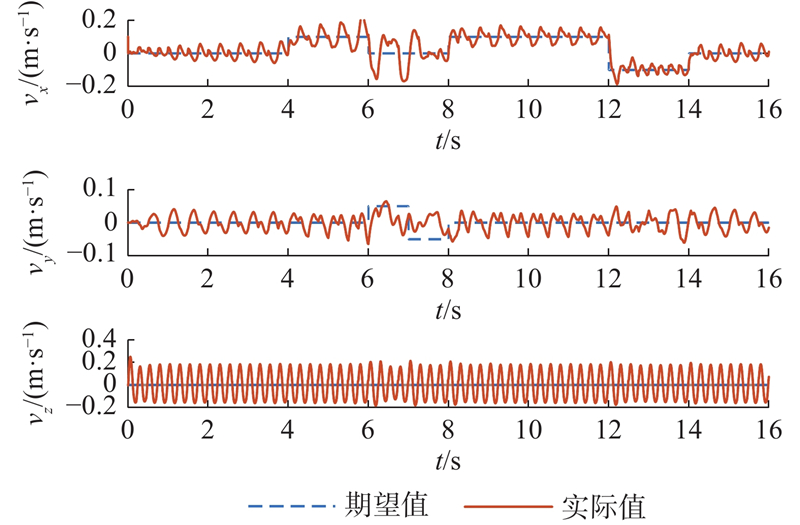
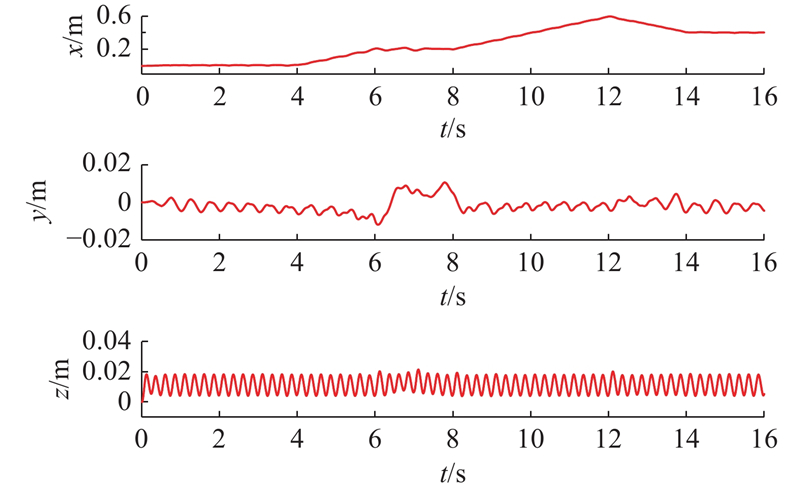
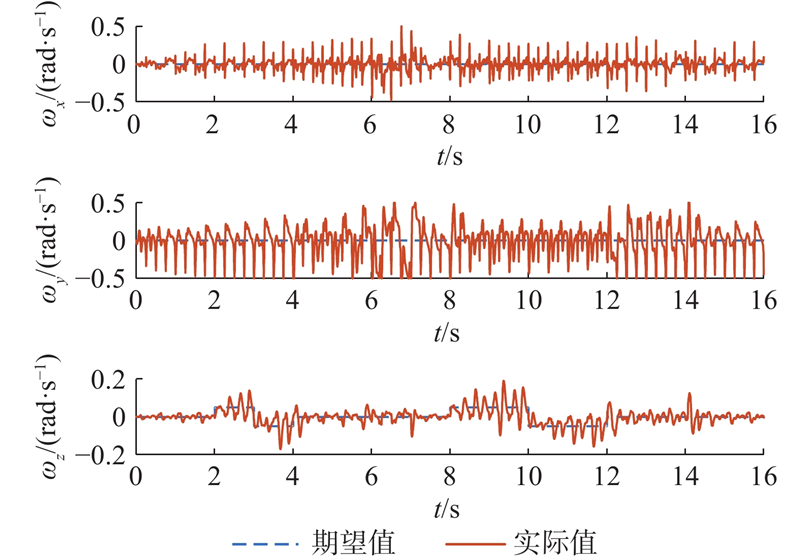
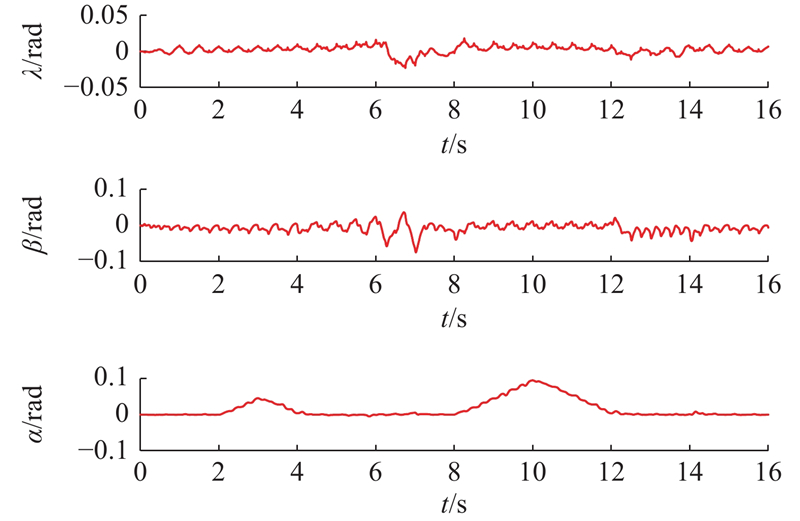
Abstract A neural control method based on fusion of two models was proposed for a quadruped robot with multiple degrees of freedom, combining central pattern generator (CPG) and model predictive control (MPC). A behavioral movement neural control architecture for a legged robot was constructed based on model predictive theory by simulating biological neural mechanisms. This architecture can process the external environment information, adaptively adjust the position of the body and legs, and realize position tracking, omnidirectional movement and a variety of atypical gaits of quadruped robot. The experimental results show that the quadruped robot based on the MPC-CPG architecture can quickly respond and eliminate the position error and angle error, the position error in trajectory tracking is always kept at ?0.1~0.1 m, and the attitude angle error is kept at ?0.05~0.05 rad. The quadruped robot not only has high trajectory tracking accuracy, but also exhibits behavioral diversity with the MPC-CPG controller, which verifies the effectiveness of the proposed MPC-CPG controller.
|
|
Received: 11 August 2023
Published: 23 July 2024
|
|
|
| Fund: 甘肃省教学成果培育项目. |
|
Corresponding Authors:
Xiaofen SHI
E-mail: qinhaipeng@chd.edu.cn;417205188@qq.com
|
基于模型预测的四足机器人运动控制
针对具有多自由度的四足机器人,结合中枢模式发生器(CPG)和模型预测控制机理(MPC),提出2种模型融合的神经控制方法. 该方法以模型预测原理为基础,通过模拟生物神经控制机制,构建腿足机器人行为运动神经控制架构. 该架构能够处理外部环境信息,自适应调节机身和腿部位置,实现机器人位置跟踪、全向运动和多种非典型步态. 实验结果表明,基于MPC-CPG控制架构的机器人可以快速响应并消除位置误差和角度误差,机身轨迹跟踪的位置误差始终保持在?0.1~0.1 m,姿态角误差保持在?0.05~0.05 rad. 在 MPC-CPG控制器的作用下,机器人不仅具有较高的轨迹跟踪精度,还表现出行为多样性,验证了所提出的MPC-CPG 控制器的有效性.
关键词:
四足机器人,
神经控制,
中枢模式发生器,
模型预测控制,
行为多样性
|
|
| [1] |
PARK H W, WENSING P M, KIM S Jumping over obstacles with MIT Cheetah 2[J]. Robotics and Autonomous Systems, 2021, 136: 103703
doi: 10.1016/j.robot.2020.103703
|
|
|
| [2] |
DE A, KODITSCHEK D E Vertical hopper compositions for preflexive and feedback-stabilized quadrupedal bounding, pacing, pronking, and trotting[J]. The International Journal of Robotics Research, 2018, 37 (7): 743- 778
doi: 10.1177/0278364918779874
|
|
|
| [3] |
PARK H W, PARK S, KIM S. Variable-speed quadrupedal bounding using impulse planning: untethered high-speed 3d running of MIT Cheetah 2 [C]// IEEE International Conference on Robotics and Automation . Seattle: IEEE, 2015: 5163-5170.
|
|
|
| [4] |
SEMINI C, TSAGARAKIS N G, GUGLIELMINO E, et al Design of HyQ: a hydraulically and electrically actuated quadruped robot[J]. Proceedings of the Institution of Mechanical Engineers, Part I: Journal of Systems and Control Engineering, 2011, 225 (6): 831- 849
doi: 10.1177/0959651811402275
|
|
|
| [5] |
HUTTERr M, GEHRING C, JUD D, et al. Anymal: a highly mobile and dynamic quadrupedal robot [C]// IEEE/RSJ International Conference on Intelligent Robots and Systems . Daejeon: IEEE, 2016: 38-44.
|
|
|
| [6] |
RAIBERT M H, TEIIO E R Legged robots that balance[J]. IEEE Expert, 1986, 4 (1): 89
|
|
|
| [7] |
CAMURRI M, RAMEZANI M, NONILI S, et al Pronto: a multi-sensor state estimator for legged robots in real-world scenarios[J]. Frontiers in Robotics and AI, 2020, 7: 68
doi: 10.3389/frobt.2020.00068
|
|
|
| [8] |
PONTON B, KHADIV M, MEDURI A, et al Efficient multicontact pattern generation with sequential convex approximations of the centroidal dynamics[J]. IEEE Transactions on Robotics, 2021, 37 (5): 1661- 1679
doi: 10.1109/TRO.2020.3048125
|
|
|
| [9] |
BJELONIC M, GRANDIA R, HARLEY O, et al. Whole-body mpc and online gait sequence generation for wheeled-legged robots [C]// IEEE/RSJ International Conference on Intelligent Robots and Systems . Prague: IEEE, 2021: 8388-8395.
|
|
|
| [10] |
VILLARREAL O, BARASUOL V, WENSING P M, et al. MPC-based controller with terrain insight for dynamic legged locomotion [C]// IEEE International Conference on Robotics and Automation . Paris: IEEE, 2020: 2436-2442.
|
|
|
| [11] |
朱雅光, 刘春潮, 张亮 基于虚拟运动神经网络的六足机器人行为控制[J]. 浙江大学学报: 工学版, 2022, 56 (6): 1107- 1118
ZHU Yaguang, LIU Chunchao, ZHANG Liang Behavior control of hexapod robot based on virtual motoneuron network[J]. Journal of Zhejiang University: Engineering Science, 2022, 56 (6): 1107- 1118
|
|
|
| [12] |
YANG C, HUANG D, HE W, et al Neural control of robot manipulators with trajectory tracking constraints and input saturation[J]. IEEE Transactions on Neural Networks and Learning Systems, 2020, 32 (9): 4231- 4242
|
|
|
| [13] |
MIKI T, LEE J, HWANGBO J, et al Learning robust perceptive locomotion for quadrupedal robots in the wild[J]. Science Robotics, 2022, 7 (62): 2822
doi: 10.1126/scirobotics.abk2822
|
|
|
| [14] |
JIN B, YE S, SU J, et al Unknown payload adaptive control for quadruped locomotion with proprioceptive linear legs[J]. IEEE/ASME Transactions on Mechatronics, 2022, 27 (4): 1891- 1899
doi: 10.1109/TMECH.2022.3170548
|
|
|
| [15] |
BAINES R, PATIBALLA S K, BOOTH J, et al Multi-environment robotic transitions through adaptive morphogenesis[J]. Nature, 2022, 610 (7931): 283- 289
doi: 10.1038/s41586-022-05188-w
|
|
|
| [16] |
SUZUKI S, KANO T, IJSPEERT A J, et al Sprawling quadruped robot driven by decentralized control with cross-coupled sensory feedback between legs and trunk[J]. Frontiers in Neurorobotics, 2021, 14: 116
|
|
|
| [17] |
SAPUTRA A A, BOTZHEIM J, IJSPEERT A J, et al Combining reflexes and external sensory information in a neuromusculoskeletal model to control a quadruped robot[J]. IEEE Transactions on Cybernetics, 2021, 52 (8): 7981- 7994
|
|
|
| [18] |
RIGHETTI L, IJSPEERT A J. Pattern generators with sensory feedback for the control of quadruped locomotion [C]// IEEE International Conference on Robotics and Automation . Pasadena: IEEE, 2008: 819-824.
|
|
|
| [19] |
MIRLETZ B T, BHANDAL P, ADAMS R D, et al Goal-directed CPG-based control for tensegrity spines with many degrees of freedom traversing irregular terrain[J]. Soft Robotics, 2015, 2 (4): 165- 176
doi: 10.1089/soro.2015.0012
|
|
|
| [20] |
BING Z, CHENG L, CHEN G, et al Towards autonomous locomotion: CPG-based control of smooth 3D slithering gait transition of a snake-like robot[J]. Bioinspiration and Biomimetics, 2017, 12 (3): 035001
doi: 10.1088/1748-3190/aa644c
|
|
|
| [21] |
SANTOS C P, ALVES N, MORENO J C Biped locomotion control through a biomimetic CPG-based controller[J]. Journal of Intelligent and Robotic Systems, 2017, 85: 47- 70
doi: 10.1007/s10846-016-0407-3
|
|
|
| [22] |
MEDEIROS V S, JELAVIC E, BJELONIC M, et al Trajectory optimization for wheeled-legged quadrupedal robots driving in challenging terrain[J]. IEEE Robotics and Automation Letters, 2020, 5 (3): 4172- 4179
doi: 10.1109/LRA.2020.2990720
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|