Kinematics and gait planning of wall-climbing quadruped robot for pipeline inner wall
Lin LI1(),Ze-hao XUE1,Di CAI2,Tie ZHANG1,*()
1. School of Mechanical and Automotive Engineering, South China University of Technology, Guangzhou 510641, China 2. Guangzhou Power Supply Bureau Limited Company, Guangzhou 510620, China
A wall-climbing quadruped robot for pipeline inner wall with negative pressure adsorption was investigated, which was used to detect the inside of gas insulated switchgear (GIS). The kinematics of the legs and body of the robot was analyzed, and an improved Newton iteration method was used to solve the complex problem of the body’s forward kinematics. The gait planning of the robot climbing along the axial and circumferential direction of the pipeline was carried out, and a zero-impact trajectory planning method was proposed. Adams was applied for motion simulation, and the omnidirectional wall climbing experiments of horizontal and vertical pipelines were carried out with the robot prototype. Results showed that the robot’s trajectory was consistent with the planned gait, and there was no sudden change in velocity and acceleration during the movement. The movement process was stable without noticeable impact. The correctness of the kinematic model and the rationality of the planned gait were verified. The robot was applied to the actual detection of the GIS pipeline, and the stable wall climbing motion and detection under different working conditions were realized.
Lin LI,Ze-hao XUE,Di CAI,Tie ZHANG. Kinematics and gait planning of wall-climbing quadruped robot for pipeline inner wall. Journal of ZheJiang University (Engineering Science), 2021, 55(12): 2286-2297.
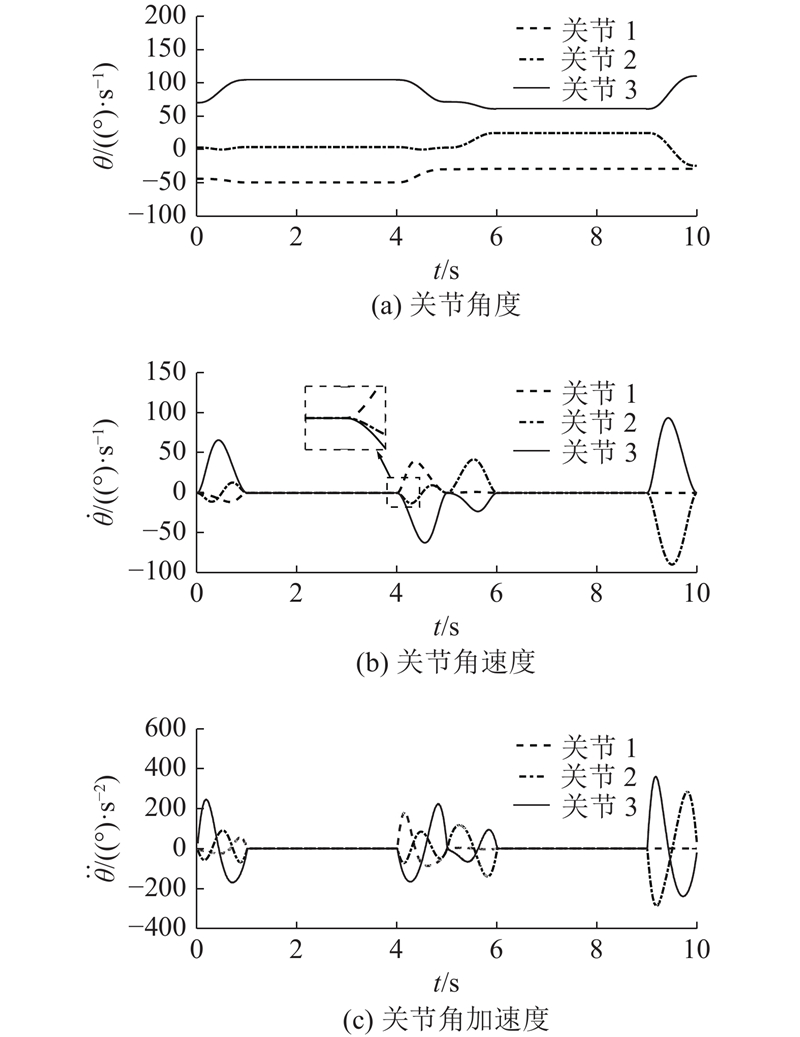
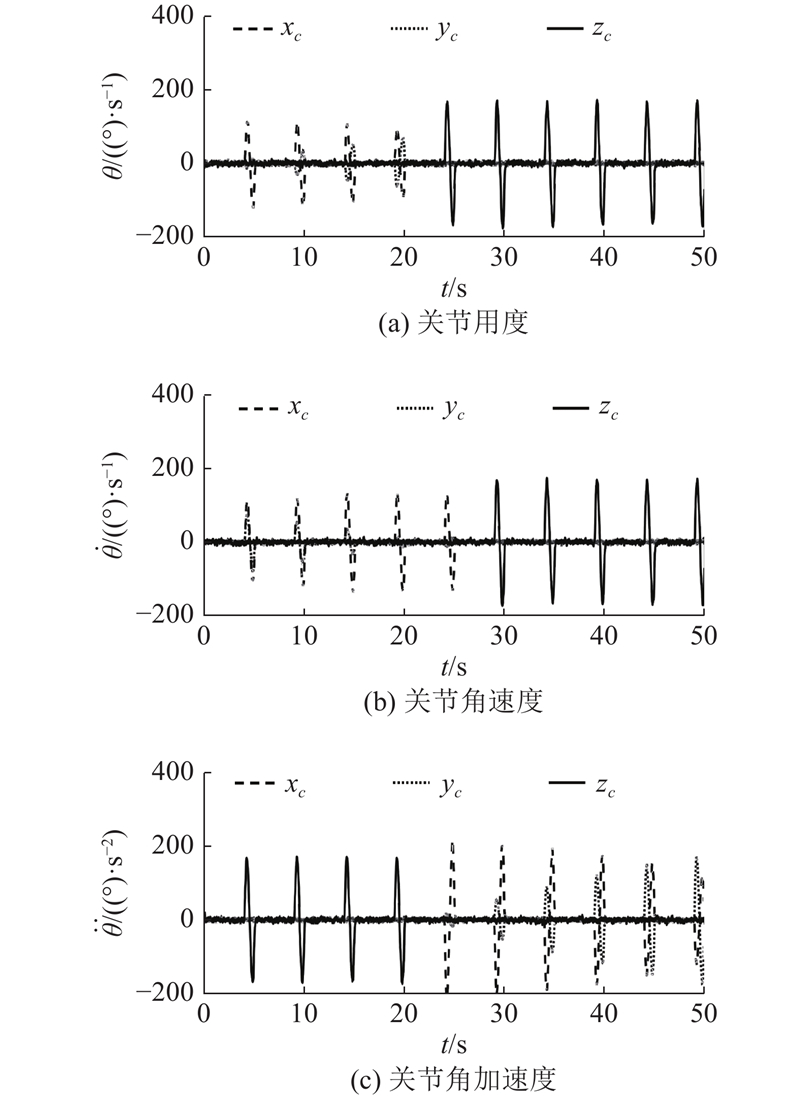
Fig.9Joint angle, angular velocity and angular acceleration of leg one by zero impact planning
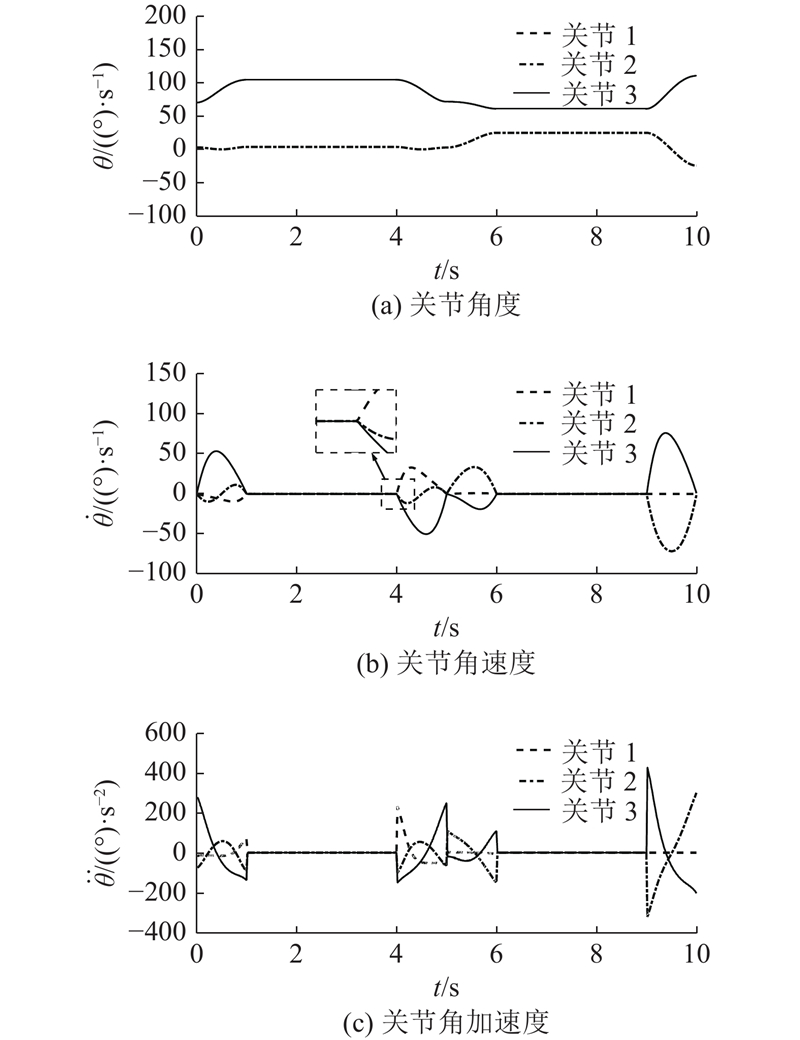
Fig.10Joint angle, angular velocity and angular acceleration of leg one by cubic spline interpolation
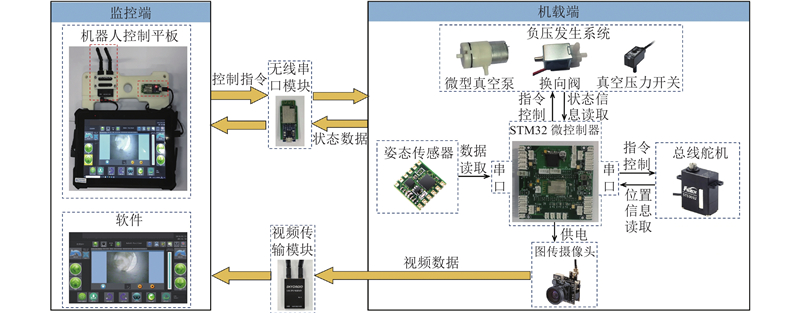
Fig.11Structure diagram of control system
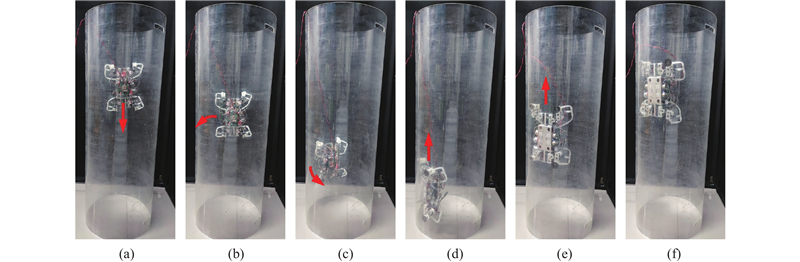
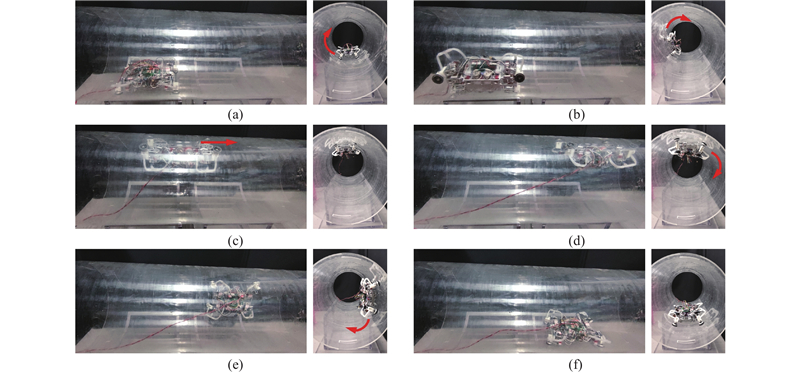
Fig.12Wall-climbing experiment of vertical pipeline
Fig.13Wall-climbing experiment of horizontal pipeline
Fig.14Actual joint angle of leg one
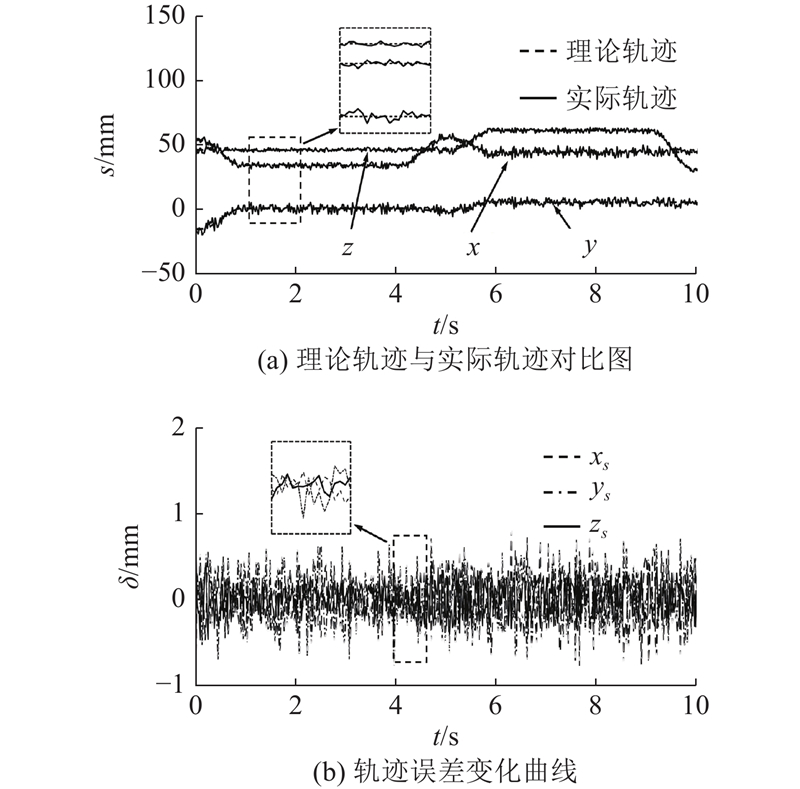
Fig.15Trajectory error analysis of leg one
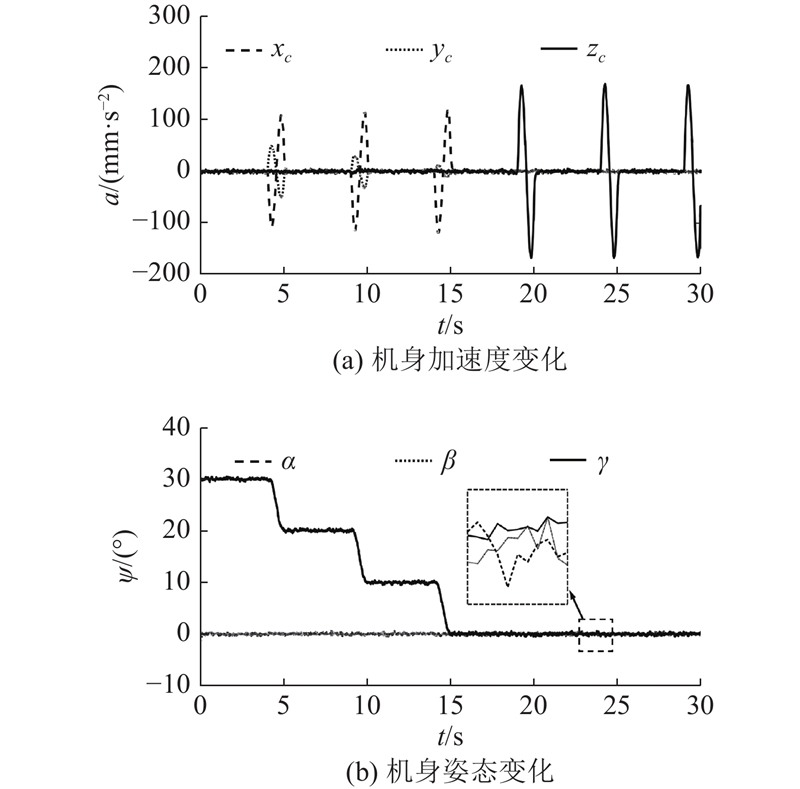
Fig.16Acceleration and attitude change of body
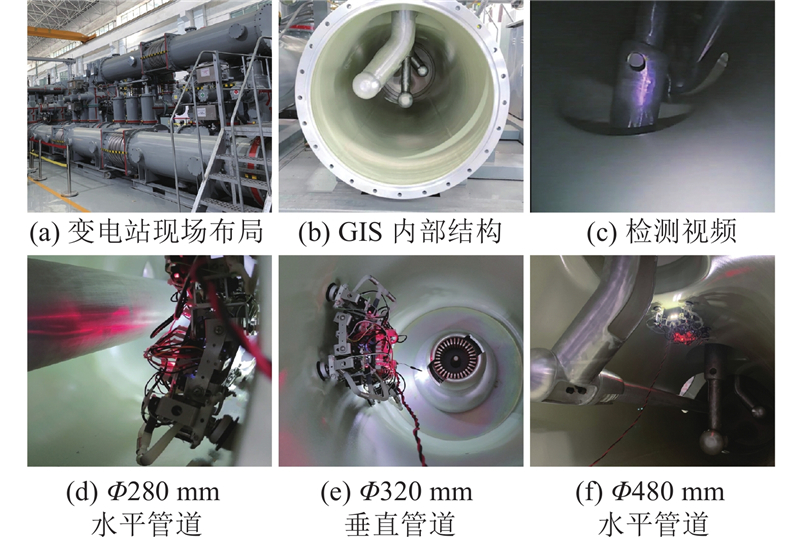
Fig.17Experiment of robot in GIS pipeline
Fig.18Acceleration curve of body in different pipelines
[1]
LI Z , WANG Q Z , LI J , et al. A new approach to classification of devices and its application to classification of in-pipe robots [C]// IEEE Conference on Industrial Electronics and Applications. Hefei: IEEE, 2016: 1426-1431.
[2]
ROH S, CHOI H Differential-drive in-pipe robot for moving inside urban gas pipelines[J]. IEEE Transactions on Robotics, 2005, 21 (1): 1- 17
doi: 10.1109/TRO.2004.838000
[3]
RODRIGUE H, WANG W, HAN M W, et al An overview of shape memory alloy-coupled actuators and robots[J]. Soft Robotics, 2017, 4 (1): 3- 15
doi: 10.1089/soro.2016.0008
[4]
BHADORIYA A, GUPTA V K, MUKHERJEE S Development of in-pipe inspection robot[J]. Materials Today: Proceedings, 2018, 5 (9): 20769- 20776
doi: 10.1016/j.matpr.2018.06.406
[5]
PARK J, HYUN D, CHO W H, et al Normal-force control for an in-pipe robot according to the inclination of pipelines[J]. IEEE Transactions on Industrial Electronics, 2011, 58 (12): 5304- 5310
doi: 10.1109/TIE.2010.2095392
[6]
唐德威, 李庆凯, 梁涛, 等 三轴差动式管道机器人机械自适应驱动技术[J]. 机械工程学报, 2008, 44 (9): 128- 133 TANG De-wei, LI Qing-kai, LIANG Tao, et al Mechanical self-adaptive drive technology of triaxial differential pipe-robot[J]. Chinese Journal of Mechanical Engineering, 2008, 44 (9): 128- 133
doi: 10.3321/j.issn:0577-6686.2008.09.022
[7]
CISZEWSKI M, BURATOWSKI T, GIERGIEL M, et al Virtual prototyping, design and analysis of an in-pipe inspection mobile robot[J]. Journal of Theoretical and Applied Mechanics, 2014, 52 (2): 417- 429
[8]
BERNS K , ILG W , CORDES S , et al. Multi-joint robot for autonomous sewer inspection [C]// Proceedings 2000 ICRA. Millennium Conference. San Francisco: IEEE, 2002: 1701-1706.
[9]
李杰超, 曹力科, 肖晓晖 轮式磁吸附超声检测爬壁机器人的设计与吸附稳定性分析[J]. 中南大学学报:自然科学版, 2019, 50 (12): 2989- 2997 LI Jie-chao, CAO Li-ke, XIAO Xiao-hui Design and adsorption stability analysis of wall climbing robot based on wheeled magnetic adsorption for ultrasonic detection[J]. Journal of Central South University: Science and Technology, 2019, 50 (12): 2989- 2997
doi: 10.11817/j.issn.1672-7207.2019.12.008
[10]
宋伟, 姜红建, 王滔, 等 爬壁机器人磁吸附组件优化设计与试验研究[J]. 浙江大学学报:工学版, 2018, 52 (10): 1837- 1844 SONG Wei, JIANG Hong-jian, WANG Tao, et al Optimization design and experimental research on magnetic components for wall-climbing robot[J]. Journal of Zhejiang University: Engineering Science, 2018, 52 (10): 1837- 1844
doi: 10.3785/j.issn.1008-973X.2018.10.001
[11]
刘泉, 陈志华 具有良好壁面过渡能力的新型爬壁机器人动力学建模与分析[J]. 机床与液压, 2018, 46 (23): 1- 5 LIU Quan, CHEN Zhi-hua Dynamic modeling and analysis of new climbing robot with good wall transition capability[J]. Machine Tool and Hydraulics, 2018, 46 (23): 1- 5
doi: 10.3969/j.issn.1001-3881.2018.23.001
[12]
UNVER O, UNERI A, AYDEMIR A, et al. Geckobot: a gecko inspired climbing robot using elastomer adhesives [C]// Proceedings 2006 IEEE International Conference on Robotics and Automation. Orlando: IEEE, 2006: 2029-2335.
[13]
ZHANG L, MA S G, INOUE K, et al. Omni-directional walking of a quadruped robot with optimal body postures on a slope [C]// Proceedings of the 2005 IEEE International Conference on Robotics and Automation. Barcelona: IEEE, 2005: 2976-2981.
[14]
BI Z M, ZHANG W J, CHEN I M, et al Automated geneartion of the D–H parameters for configuration design of modular manipulators[J]. Robotics and Computer-Integrated Manufacturing, 2007, 23 (5): 553- 562
doi: 10.1016/j.rcim.2006.02.014
[15]
GÜLHAN M M, ERBATUR K Kinematic arrangement optimization of a quadruped robot with genetic algorithms[J]. Measurement and Control, 2018, 51 (9/10): 406- 416
[16]
CHEN X D, WATANABE K, IZUMI K Kinematic solution of a quadruped walking robot-posture analysis of TITAN-VIII[J]. IFAC Proceedings Volumes, 1999, 32 (2): 827- 832
doi: 10.1016/S1474-6670(17)56140-6
[17]
KANG T, KIM H, SON T, et al. Design of quadruped walking and climbing robot [C]// Proceedings 2003 IEEE/RSJ International Conference on Intelligent Robots and Systems. Las Vegas: IEEE, 2003: 619-624.
[18]
NAM W, SEO T W, KIM B, et al Kinematic analysis and experimental verification on the locomotion of gecko[J]. Journal of Bionic Engineering, 2009, 6 (3): 246- 254
doi: 10.1016/S1672-6529(08)60121-3
[19]
SHKOLNIK A, TEDRAKE R. Inverse kinematics for a point-foot quadruped robot with dynamic redundancy resolution [C]// Proceedings 2007 IEEE International Conference on Robotics and Automation. Roma: IEEE, 2007: 4331-4336.
[20]
CAMPA R, BERNAL J, SOTO I. Kinematic modeling and control of the hexapod parallel robot [C]// 2016 American Control Conference. Boston: IEEE, 2016: 1203-1208.
[21]
HOWARD D, ZHANG S J, SANGER D J Kinematic analysis of a walking machine[J]. Mathematics and Computers in Simulation, 1996, 41 (5/6): 525- 538
[22]
阮鹏, 俞志伟, 张昊, 等 基于ADAMS的仿壁虎机器人步态规划及仿真[J]. 机器人, 2010, 32 (4): 499- 504 RUAN Peng, YU Zhi-wei, ZHANG Hao, et al Gait planning and simulation of gecko inspired robot based on ADAMS[J]. ROBOT, 2010, 32 (4): 499- 504
doi: 10.3724/SP.J.1218.2010.00499
[23]
SON D H, JEON D S, NAM W C, DONGHOON, et al Gait planning based on kinematics for a quadruped gecko model with redundancy[J]. Robotics and Autonomous Systems, 2010, 58 (5): 648- 656
doi: 10.1016/j.robot.2009.11.009
[24]
GUAN Y, ZHU H, WU W, et al A modular biped wall-climbing robot with high mobility and manipulating function[J]. IEEE/ASME Transactions on Mechatronics, 2013, 18 (6): 1787- 1798
doi: 10.1109/TMECH.2012.2213303
[25]
GHOSH S K Introduction to robotics: mechanics and control[J]. Journal of Materials Processing Technology, 1991, 25 (2): 239- 240
doi: 10.1016/0924-0136(91)90096-W
[26]
CHOI H B, KONNO A, UCHIYAMA M Closed-form forward kinematics solutions of a 4-DOF parallel robot[J]. International Journal of Control, Automation and Systems, 2009, 7 (5): 858- 864
doi: 10.1007/s12555-009-0520-1
[27]
ONANAYE A S Nonlinear programming: theories and algorithms of some unconstrained optimization methods (steepest descent and Newton's method)[J]. International Journal of Engineering and Management Research, 2020, 10 (2): 1- 12
[28]
JIANG Z L A new algorithm for computing the inverse and generalized inverse of the scaled factor circulant matrix[J]. Journal of Computational Mathematics, 2008, 26 (1): 112- 122
[29]
陈金平, 贺昱曜, 巨永锋, 等. 三电平逆变器SHEPWM牛顿下山法求解研究[J]. 电力电子技术, 2013, 47(9): 8-10. CHEN Jin-ping , HE Yu-yao , JU Yong-feng , et al. SHEWPM of three-level inverter based on newton downhill method [J], Power Electronics , 2013, 47(9): 8-10.
[30]
LI B, LI Y, RONG X. Locomotion planning and performance analysis of quadruped robot based on ADAMS and MATLAB co-simulation [C]// Proceedings of the 32nd Chinese Control Conference. Xi'an: IEEE, 2013: 5914-5919.