|
|
|
| Multi-target parameters of performance optimization for 5-PSS/UPU parallel mechanism |
Yan-biao LI( ),Hang ZHENG,Meng-ru XU,Yi-qin LUO,Peng SUN ),Hang ZHENG,Meng-ru XU,Yi-qin LUO,Peng SUN |
| College of Mechanical Engineering, Zhejiang University of Technology, Hangzhou 310032, China |
|
|
|
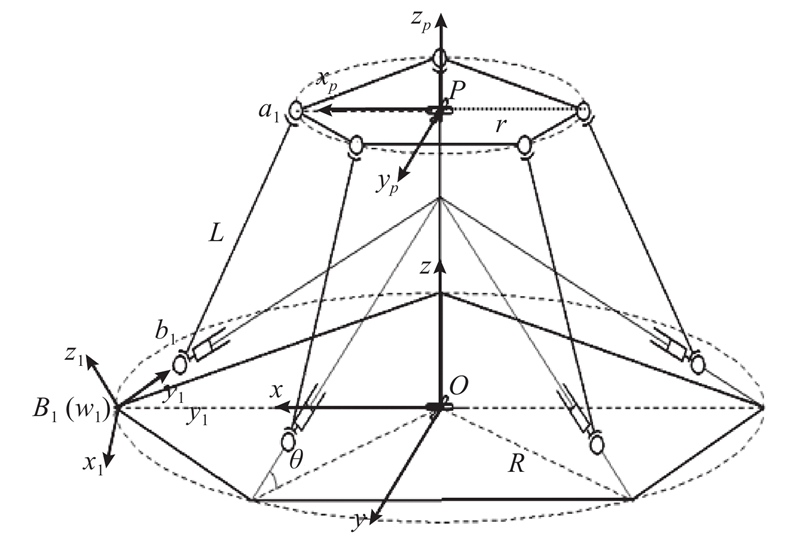
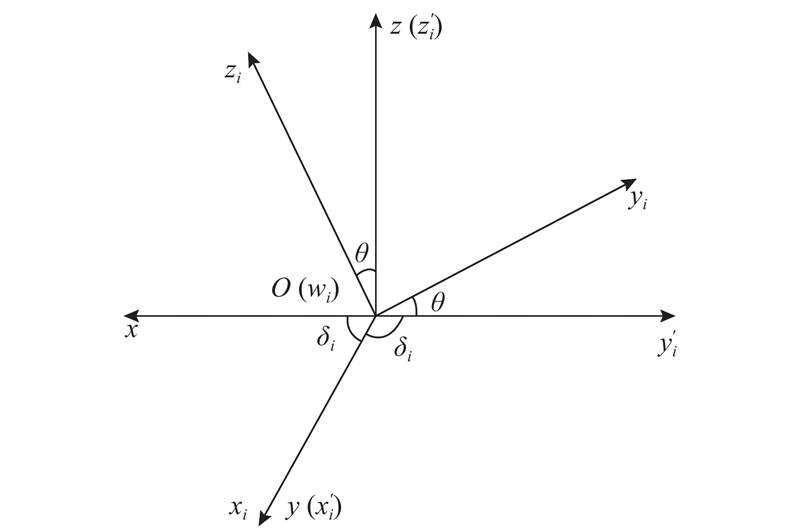
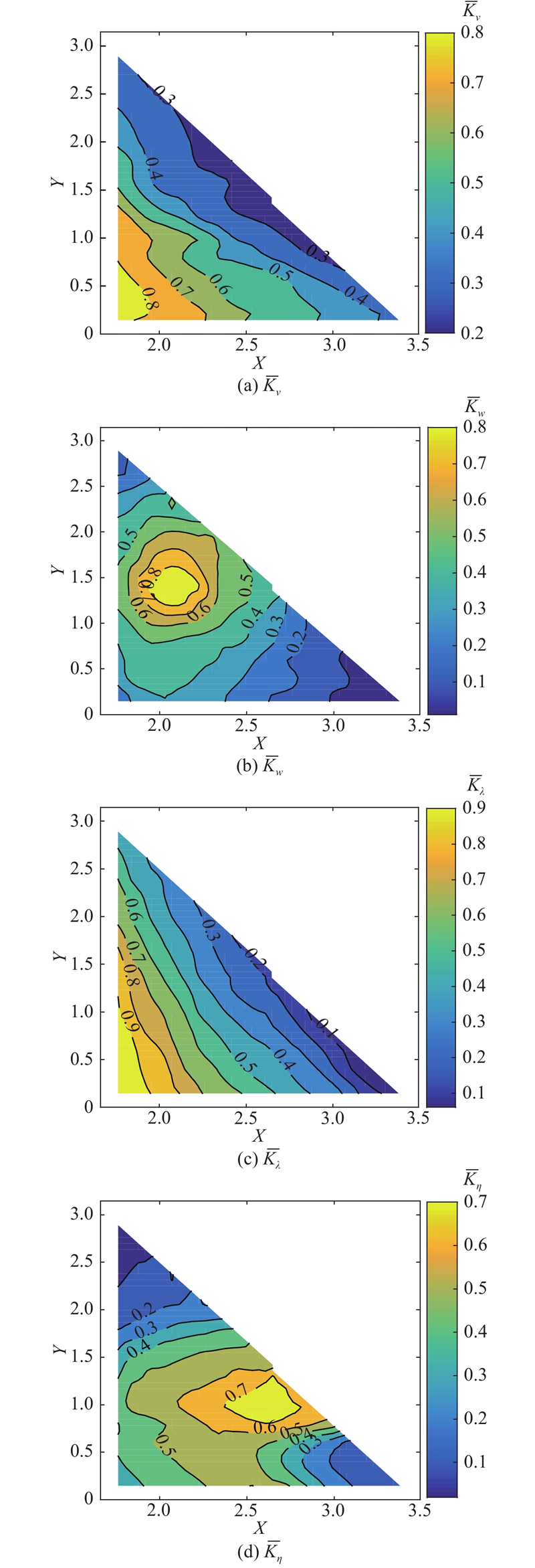
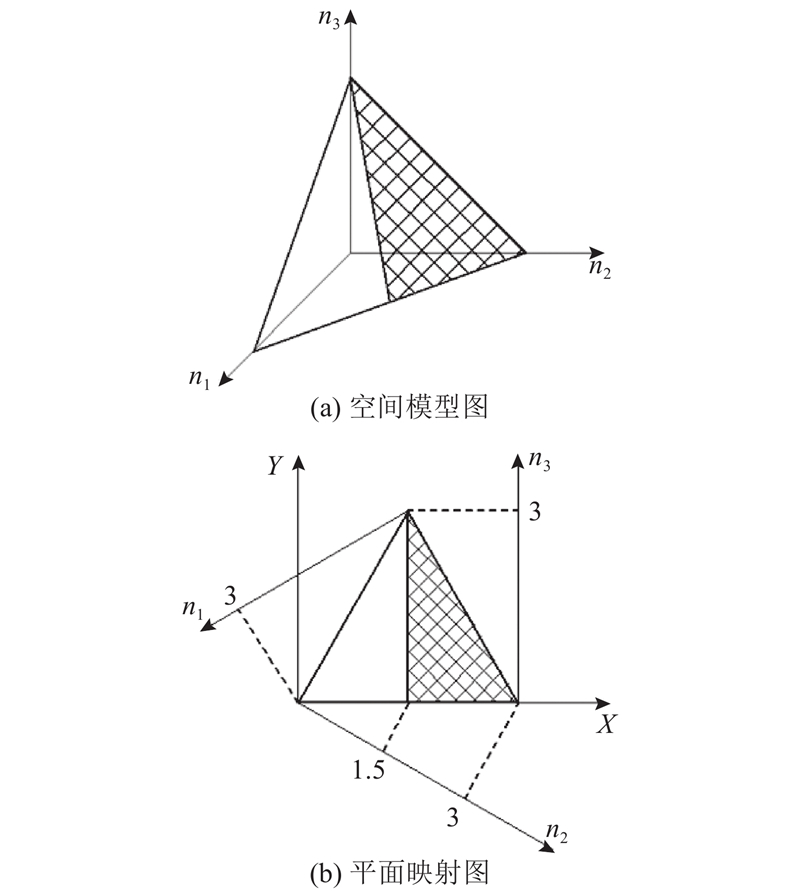
Abstract The multi-target parameters of performance optimization for the 5-PSS/UPU parallel mechanism were optimized by using the principal component analysis (PCA) method and space models in aspect of comprehensively considering the multi-objective parallel mechanism performance. Several performance evaluation indices were proposed and discussed according to the inverse position equations, kinematics transmission equations and screw theory analysis of this five-DOF parallel mechanism. Then the spatial model technology was used to reveal the relationship of each performance evaluation indexes and structure parameters of this 5-PSS/UPU parallel mechanism. The multi-dimensional performance indicators were effectively integrated by reducing redundant data based on PCA, and the comprehensive performance optimization and design space were obtained. Multiple sets of structural parameters were selected based on comprehensive design space, and the distribution of performance indicators in the working space of the 5-PSS/UPU parallel mechanism was calculated. Results show that the method of PCA and space models can optimize the sizes of the mechanism considering all of mechanism performances. The optimization method is also suitable for other parallel mechanisms.
|
|
Received: 20 March 2018
Published: 28 March 2019
|
|
|
5-PSS/UPU并联机构的多目标性能参数优化
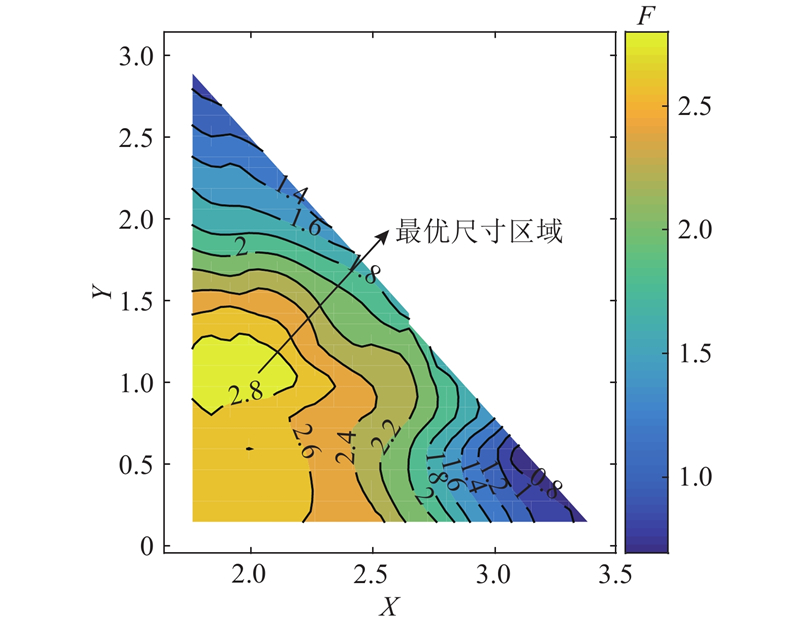
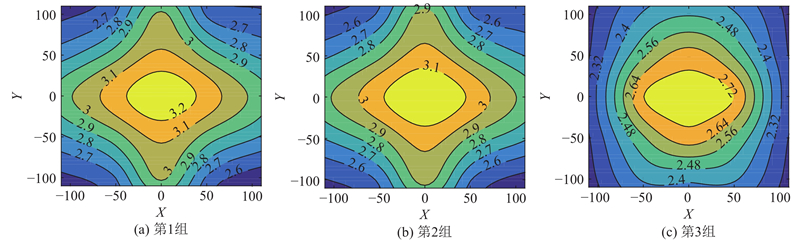
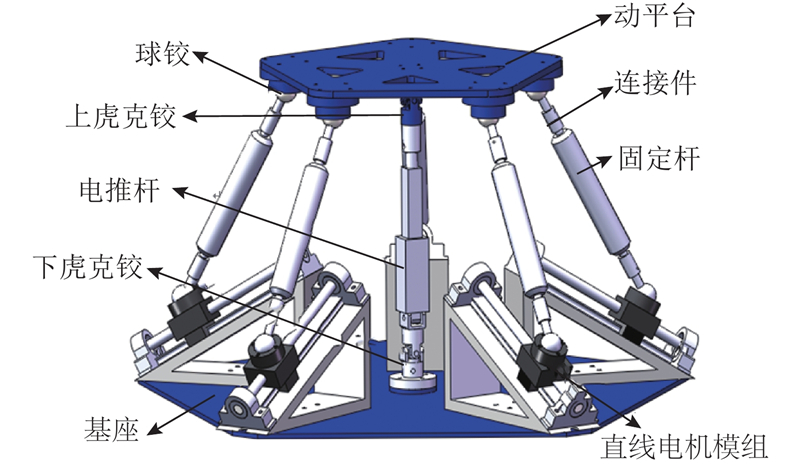
在并联机构多目标参数优化方面,针对5-PSS/UPU并联机构,提出基于空间模型技术与主成分分析法相结合的多目标性能参数优化方法. 推导出机构的位置反解、运动传递平衡方程,对单个驱动分支进行螺旋分析,给出多个全域性能指标;应用空间模型技术,研究各全域性能评价指标与机构结构参数之间的分布规律,绘制了各项全域性能图谱;应用主成分分析(PCA)法,研究各全域性能指标之间的相关性,得到综合性能评价指标函数并绘制综合性能图谱;基于综合性能图谱,选取多组结构参数并计算综合性能指标在机构工作空间下的分布规律.研究结果表明,空间模型技术结合PCA法能够综合考虑机构的各项性能,对结构参数进行优化设计,该优化方法同样适用于其他并联机构.
关键词:
并联机构,
运动学分析,
性能指标,
主成分分析(PCA)
|
|
| [1] |
HOU Y, HU X, ZENG D, et al Biomimetic shoulderComplex based on 3-PSS/S spherical parallel mechanism[J]. Chinese Journal of Mechanical Engineering, 2015, 28 (1): 29- 37
doi: 10.3901/CJME.2014.0820.137
|
|
|
| [2] |
LI Y, JIN Z, JI S, et al Design of mechanical coxa joints based on three-degree-of-freedom spherical parallel manipulators[J]. Journal of mechanical Science and Technology, 2013, 27 (1): 103- 112
doi: 10.1007/s12206-012-1225-6
|
|
|
| [3] |
LI Y, TAN D, WEN D, et al Parameters optimization of a novel 5-DOF gasbag polishing machine tool[J]. Chinese Journal of Mechanical Engineering, 2013, 26 (4): 680- 688
doi: 10.3901/CJME.2013.04.680
|
|
|
| [4] |
GOSSELIN C, ANGELES J The optimum kinematic design of spherical three-degree-of-freedom parallel manipulator[J]. Journal of Mechanisms Transmissions and Automation in Design, 1989, 111 (2): 202- 207
doi: 10.1115/1.3258984
|
|
|
| [5] |
黄冠宇, 方跃法, 曲海波, 等 基于遗传算法的五杆机构运动性能优化[J]. 北京交通大学学报, 2015, 39 (04): 44- 48
HUANG Guan-yu, FANG Yue-fa, QU Hai-bo, et al Optimization of the motion performance of planar five-bar linkage using a genetic algorithm[J]. Journal of Beijing Jiaotong University, 2015, 39 (04): 44- 48
|
|
|
| [6] |
陈修龙, 蒋德玉, 陈林林, 等 冗余并联机构运动学性能分析与优化[J]. 农业机械学报, 2016, 47 (06): 340- 347
CHEN Xiu-long, JIANG De-yu, CHEN Lin-lin, et al Kinematics performance analysis and optimal design of redundant actuation parallel mechanism[J]. Trans-actions of the Chinese Society of Agricultural Machinery, 2016, 47 (06): 340- 347
|
|
|
| [7] |
李研彪, 刘毅, 赵章分, 等 基于空间模型技术的拟人机械腿的运动学传递性能分析[J]. 农业工程学报, 2013, 29 (02): 17- 23
LI Yan-biao, LIU Yi, ZHAO Zhang-fen, et al Kinematics transmission analysis on anthropopathic mechanical leg based on spatial model technique[J]. Transactions of the Chinese Society of Agricultural Engineering, 2013, 29 (02): 17- 23
|
|
|
| [8] |
刘辛军. 并联机器人机构尺寸与性能之间的关系分析及 其设计理论研究 [D]. 秦皇岛: 燕山大学, 1999.
LIU Xin-jun. The relationship between the performance criteria and link lengths of the parallel manipulators and their design theory [D]. Qinhuangdao: Yanshan University, 1999.
|
|
|
| [9] |
XIE F, LIU X J, WANG J 3-DOF parallel manufacturing module and its kinematic optimization[J]. Robotics and Computer Integrated Manufacturing, 2012, 28 (3): 334- 343
doi: 10.1016/j.rcim.2011.10.003
|
|
|
| [10] |
王飞博, 陈巧红, 武传宇, 等 2-UPR-SPR并联机王尺度综合[J]. 机械工程学报, 2015, 51 (21): 24- 32
WANG Fei-bo, CHEN Qiao-hong, WU Chuan-yu, et al Dimensional synthesis of a 2-UPR-SPR parallel ma-nipulator[J]. Journal of Mechanical Engineering, 2015, 51 (21): 24- 32
|
|
|
| [11] |
赵星宇, 赵铁石, 云轩, 等 3-P(4S)并联机构分析与多 目标性能优化[J]. 农业机械学报, 2017, 48 (10): 390- 400
ZHAO Xing-yu, ZHAO Tie-shi, YUN Xuan, et al Mechanism analysis and multi-target performance optimization of 3-P(4S) parallel mechanism[J]. Transactions of the Chinese Society of Agricultural Machinery, 2017, 48 (10): 390- 400
doi: 10.6041/j.issn.1000-1298.2017.10.050
|
|
|
| [12] |
李研彪, 郑航, 王林, 等. 一种柔性自适应柔性动态平衡装置: ZL201711377071. 3. X[P]. 2017-12-19.
LI Yan-biao, ZHENG Hang, WANG Lin, et al. A adaptive flexible dynamic balance transposition: ZL201711377071. 3. X [P]. 2017-12-19.
|
|
|
| [13] |
KURODA M, MORI Y, LIZUKA M, et al Acceleration of the alternating least squares algorithm for principal components analysis[J]. Computational Statistics and Data Analysis, 2011, 55 (1): 143- 153
doi: 10.1016/j.csda.2010.06.001
|
|
|
| [14] |
王婧瑶, 许勇, 曹本希, 等 基于主成分分析的超声人脸识别算法研究[J]. 计算机工程与设计, 2013, 34 (08): 2867- 2871
WANG Jing-yao, XU Yong, CAO Ben-xin, et al Ultrasonic face recognition algorithm based on principal component analysis[J]. Computer Engineering and Design, 2013, 34 (08): 2867- 2871
doi: 10.3969/j.issn.1000-7024.2013.08.043
|
|
|
| [15] |
蔡自兴. 机器人学基础[M]. 北京: 机械工业出版社, 2009.
|
|
|
| [16] |
李研彪, 刘毅, 李景敏, 等 新型拟人机械腿的参数优化[J]. 中国机械工程, 2013, 24 (09): 1239- 1245
LI Yan-biao, LIU Yi, LI Jing-min, et al Parameter optimization for a novel mechanical leg[J]. China Mechanical Engineering, 2013, 24 (09): 1239- 1245
doi: 10.3969/j.issn.1004-132X.2013.09.022
|
|
|
| [17] |
陈祥, 谢福贵, 刘辛军 并联机构中运动/力传递功率最大值的评价[J]. 机械工程学报, 2014, 50 (03): 1- 9
CHEN Xiang, XIE Fu-gui, LIU Xin-jun Evaluation of the maximum value of motion/force transmission power in parallel manipulators[J]. Journal of Mechanical Engineering, 2014, 50 (03): 1- 9
|
|
|
| [18] |
赵延治, 王敬磊, 李扬, 等 高运动/力传递性能移动并联机构分析[J]. 机械工程学报, 2016, 52 (19): 18- 24
ZHAO Yan-zhi, WANG Jing-lei, LI Yang, et al Analysis of translational parallel mechanism with good motion/force transmission ability[J]. Journal of Mechanical Engineering, 2016, 52 (19): 18- 24
|
|
|
| [19] |
GAO F, LIU X J, CHEN X Relationships between the shapes of the workspaces and the link lengths of 3-DOF symmetrical parallel manipulator[J]. Mechanism and Machine Theory, 2001, 36 (2): 205- 220
doi: 10.1016/S0094-114X(00)00046-X
|
|
|
| [20] |
YUE Y, GAO F, ZHAO X, et al Relationship among input-force, payload, stiffness and displacement of a 3-DOF perpendicular parallel micro manipulator[J]. Mechanism and Machine Theory, 2010, 45 (5): 756- 771
doi: 10.1016/j.mechmachtheory.2009.12.006
|
|
|
| [21] |
赵京, 李立明, 尚红, 等 基于主成分分析法的机械臂运动灵活性性能综合评价[J]. 机械工程学报, 2014, 50 (13): 9- 15
ZHAO Jing, LI Li-ming, SHANG Hong, et al Comprehensive evaluation of robotic kinematic dexterity performance based on principal component analysis[J]. Journal of Mechanical Engineering, 2014, 50 (13): 9- 15
|
|
|
| [22] |
梁胜杰, 张志华, 崔立林 主成分分析法与核主成分分析法在机械噪声数据降维中的应用比较[J]. 中国机械工程, 2011, 22 (1): 80- 83
LIANG Sheng-jie, ZHANG Zhi-hua, CUI Li-lin Comparison between PCA and KPCA method in dimensional reduction of mechanical noise data[J]. China Mechanical Engineering, 2011, 22 (1): 80- 83
|
|
|
| [23] |
曾达幸, 王娟娟, 樊明洲, 等 基于主成分分析方法的并联机构参数优化[J]. 中国机械工程, 2017, 28 (24): 2899- 2905
ZENG Da-xing, WANG Juan-juan, FAN Ming-zhou, et al Parameter optimization of parallel mechanisms based on PCA[J]. China Mechanical Engineering, 2017, 28 (24): 2899- 2905
doi: 10.3969/j.issn.1004-132X.2017.24.001
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|