|
|
|
| Trajectory optimization of small supersonic unmanned aerial vehicle based on pseudo-spectral method |
Xiao-chen SONG( ),Xiao-fan YAO,Shang-jun YE*() ),Xiao-fan YAO,Shang-jun YE*() |
| School of Aeronautics and Astronautics, Zhejiang University, Hangzhou 310000, China |
|
|
|
Abstract A new supersonic unmanned aerial vehicle (UAV) with a powerless combustion chamber was proposed to solve the problem that the design was complicated and the fuel consumption was too high in order to improve the economic performance of small supersonic UAV. A trajectory optimization of the new UAV based on hp adaptive pseudo-spectral method was proposed to optimize the trajectory with the target of the minimum fuel consumption and minimum time in a flight section which shall make the UAV reach supersonic cruise flight by introducing the Mach subduction maneuver. The control variable and state variable were discretized, and the multi-constraint optimal control problem was transformed into a nonlinear programming problem by combining with the physical process of the UAV flight. The proposed optimal trajectory was compared with the conventional flight schemes, and the effects of critical design parameters on the optimal trajectory were analyzed. The simulation results show that the proposed method can effectively plot a feasible path which shall make the UAV climb from high subsonic to supersonic flight. The obtained minimum fuel consumption and minimum climb time are better than the traditional flight scheme. The minimum fuel consumption was reduced by about 11%, and the minimum climb time was reduced by about 46%.
|
|
Received: 27 February 2021
Published: 05 January 2022
|
|
|
| Fund: 国防基础科研计划资助项目(JCKY2019205A006);浙江省重点研发计划资助项目(2020C05001) |
|
Corresponding Authors:
Shang-jun YE
E-mail: zzmsxc1996@foxmail.com;yeshangjun@zju.edu.cn
|
基于伪谱法的小型超音速无人机轨迹优化
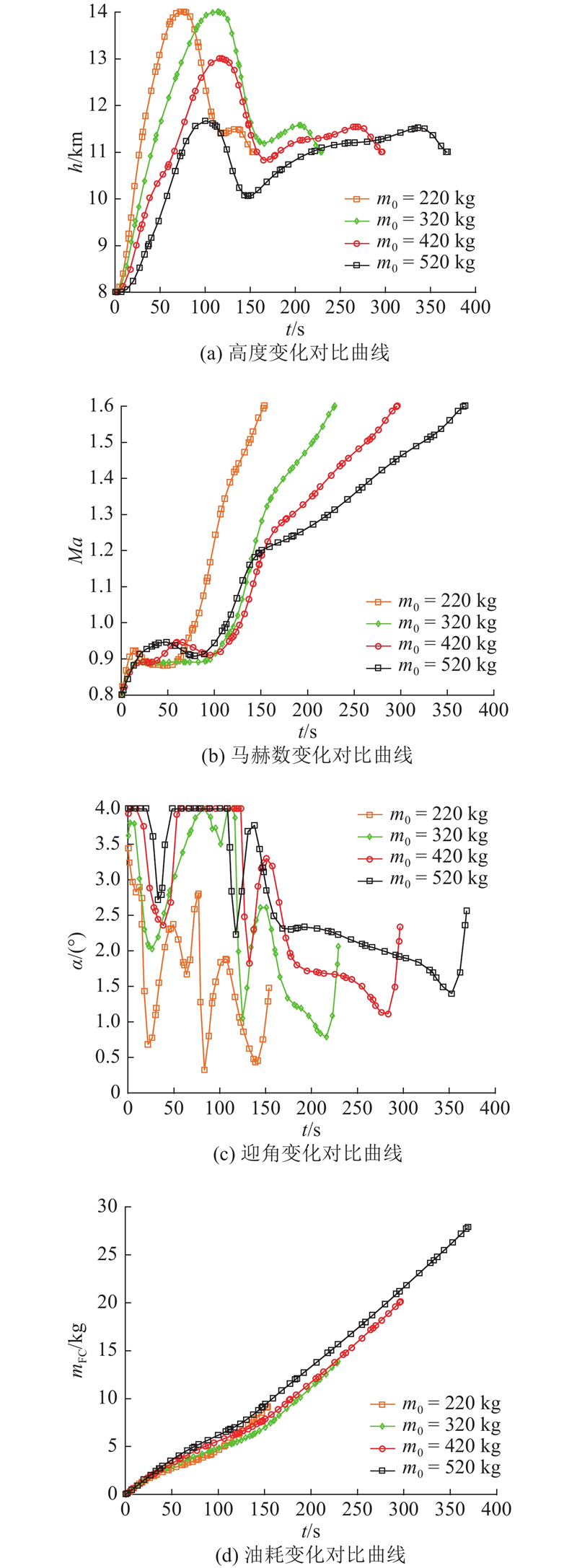
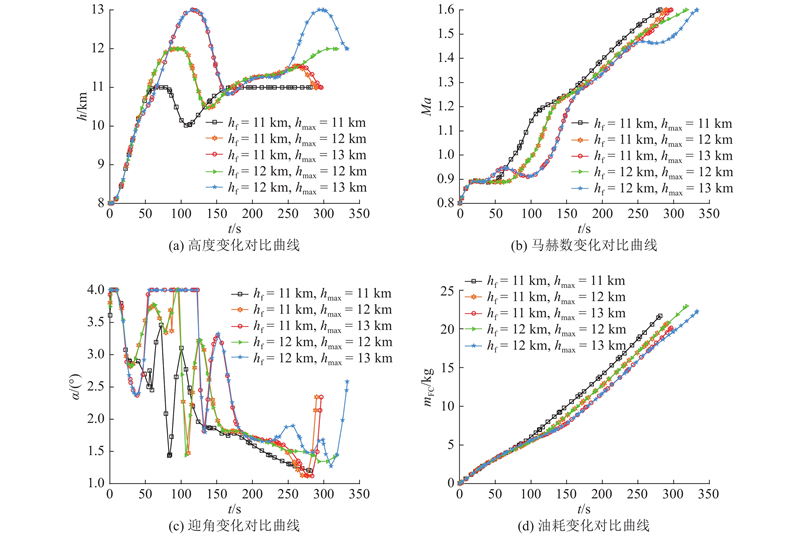
为了提高小型超音速无人机的经济性能,针对配备加力燃烧室导致设计复杂、油耗过大的问题,提出小型无加力燃烧室的超音速无人机. 利用马赫俯冲机动突破音障,基于hp自适应伪谱法的最优控制轨迹规划方法,求解达到超音速巡航飞行的最小油耗和最小时间2种轨迹最优化问题. 该方法将控制与状态变量离散化,结合无人机飞行的物理过程,将多约束最优控制问题转化为非线性规划问题. 将本文与传统飞行方案所得的结果进行比较,分析重要设计参数对最优轨迹的影响. 仿真结果表明,利用该方法能够有效地规划出无人机从高亚音速到超音速飞行过程中的可行轨迹,得到的最小油耗、最小爬升时间均优于传统飞行方案,最小油耗降低约11%,最小爬升时间降低约46%.
关键词:
小型超音速无人机,
hp自适应伪谱法,
马赫俯冲,
最优控制,
轨迹规划
|
|
| [1] |
明超, 孙瑞胜, 白宏阳, 等 吸气式超声速导弹爬升段多约束轨迹优化[J]. 宇航学报, 2016, 37 (9): 1063- 1071
MING Chao, SUN Rui-sheng, BAI Hong-yang, et al Climb trajectory optimization with multiple constraints for air-breathing supersonic missile[J]. Journal of Astronautics, 2016, 37 (9): 1063- 1071
doi: 10.3873/j.issn.1000-1328.2016.09.005
|
|
|
| [2] |
刘靖, 刘志强 超音速靶机的总体设计与研究[J]. 宇航计测技术, 2016, 36 (4): 60- 63
LIU Jing, LIU Zhi-qiang Conceptual design and research of supersonic target drone[J]. Journal of Astronautic Metrology and Measurement, 2016, 36 (4): 60- 63
doi: 10.3969/j.issn.1000-7202.2016.04.012
|
|
|
| [3] |
安兵辉, 韩庆, 王广博 基于NSGA-II的超音速飞机最快爬升轨迹分析[J]. 科学技术与工程, 2011, 11 (33): 8238- 8242
AN Bing-hui, HAN Qing, WANG Guang-bo Analysis of supersonic airplane's fastest climb trajectory based on NSGA-II[J]. Science Technology and Engineering, 2011, 11 (33): 8238- 8242
doi: 10.3969/j.issn.1671-1815.2011.33.030
|
|
|
| [4] |
WALTER S, STARKEY R. GoJett: design and optimization of a supersonic unmanned aerial flight system [C]// 12th AIAA Aviation Technology, Integration and Operations Conference. Indiana: AIAA, 2012.
|
|
|
| [5] |
Japan Aerospace Exploration Agency (JAXA). Demonstration of aerodynamic design technologies on supersonic experimental airplane (NEXST-1) by flight test [R]. Alexandria: U. S. Department of Commerce National Technical Information Service, 2007.
|
|
|
| [6] |
BRAVO-MOSQUERA P D, ABDALLA A M, CERO NMUNOZ H D, et al Integration assessment of conceptual design and intake aerodynamics of a non-conventional air-to-ground fighter aircraft[J]. Aerospace Science and Technology, 2019, 86 (3): 497- 519
|
|
|
| [7] |
SCHAMHORST R. An overview of military aircraft supersonic inlet aerodynamics [C]// 50th AIAA Aerospace Sciences Meeting. Tennessee: AIAA, 20 12.
|
|
|
| [8] |
FENG X Q, LI Z K, SONG B F Research of low boom and low drag supersonic aircraft design[J]. Chinese Journal of Aeronautics, 2014, 27 (3): 531- 541
doi: 10.1016/j.cja.2014.04.004
|
|
|
| [9] |
王钢林, 郑遂 跨声速面积律的近场机理研究[J]. 实验流体力学, 2016, 30 (4): 1- 6
WANG Gang-lin, ZHENG Sui Research on mechanism of transonic area rule in near field[J]. Journal of Experiments in Fluid Mechanics, 2016, 30 (4): 1- 6
|
|
|
| [10] |
YAN X D, LYU S, TANG S Analysis of optimal initial glide conditions for hypersonic glide vehicles[J]. Chinese Journal of Aeronautics, 2014, 27 (2): 217- 225
doi: 10.1016/j.cja.2014.02.019
|
|
|
| [11] |
罗淑贞, 孙青林, 檀盼龙, 等 基于高斯伪谱法的翼伞系统复杂多约束轨迹规划[J]. 航空学报, 2017, 38 (3): 220- 230
LUO Shu-zhen, SUN Qing-lin, TAN Pan-long, et al Trajectory planning of parafoil system with intricate constraints based on Gauss pseudo-spectral method[J]. Acta Aeronautica et Astronautica Sinica, 2017, 38 (3): 220- 230
|
|
|
| [12] |
杨希祥, 杨慧欣, 王鹏 伪谱法及其在飞行器轨迹优化设计领域的应用综述[J]. 国防科技大学学报, 2015, 37 (4): 1- 8
YANG Xi-xiang, YANG Hui-xin, WANG Peng Overview of pseudo-spectral method and its application in trajectory optimum design for flight vehicles[J]. Journal of National University of Defense Technology, 2015, 37 (4): 1- 8
doi: 10.11887/j.cn.201504001
|
|
|
| [13] |
刘超越, 张成 基于高斯伪谱法的二级助推战术火箭多阶段轨迹优化[J]. 兵工学报, 2019, 40 (2): 292- 302
LIU Chao-yue, ZHANG Cheng Multi-stage trajectory optimization of tactical two-stage booster rocket based on Gauss Pseudo-spectral method[J]. Acta Armamentarii, 2019, 40 (2): 292- 302
|
|
|
| [14] |
王少奇, 马东立, 杨穆清, 等 高空太阳能无人机三维航迹优化[J]. 北京航空航天大学学报, 2019, 45 (5): 936- 943
WANG Shao-qi, MA Dong-li, YANG Mu-qing, et al Three dimensional optimal path planning for high altitude solar powered UAV[J]. Journal of Beijing University of Aeronautics and Astronautics, 2019, 45 (5): 936- 943
|
|
|
| [15] |
HONG S M, SEO M G, SHIM S W, et al Sensitivity analysis on weight and trajectory optimization results for multistage guided missile[J]. IFAC PapersOn -Line, 2016, 49 (17): 23- 27
doi: 10.1016/j.ifacol.2016.09.005
|
|
|
| [16] |
陈晓, 王新民, 周健 无人飞行器纵向剖面轨迹优化[J]. 控制理论与应用, 2013, 30 (1): 31- 36
CHEN Xiao, WANG Xin-min, ZHOU Jian Optimization of vertical profile trajectory for unmanned aerial vehicle[J]. Control Theory and Applications, 2013, 30 (1): 31- 36
doi: 10.7641/CTA.2013.20314
|
|
|
| [17] |
DARBY C L. Hp pseudo-spectral method for solving continuous-time nonlinear optimal control problems [D]. Gainesville: University of Florida, 2011.
|
|
|
| [18] |
邱文杰, 孟秀云 基于hp自适应伪谱法的飞行器多阶段轨迹优化[J]. 北京理工大学学报, 2017, 37 (4): 412- 417
QIU Wen-jie, MENG Xiu-yun Multi-phase trajectory optimization of vehicle based on hp adaptive pseudo-spectral method[J]. Journal of Beijing Institute of Technology, 2017, 37 (4): 412- 417
|
|
|
| [19] |
COTS O, GERGAUD J, GOUBINAT D Direct and indirect methods in optimal control with state constraints and the climbing trajectory of an aircraft[J]. Optimal Control Applications and Methods, 2018, 39 (1): 281- 301
doi: 10.1002/oca.2347
|
|
|
| [20] |
YANG S B, CUI T, HAO X Y, et al Trajectory optimization for a ramjet-powered vehicle in ascent phase via the Gauss pseudo-spectral method[J]. Aerospace Science and Technology, 2017, 67 (8): 88- 95
|
|
|
| [21] |
明超, 孙瑞胜, 白宏阳, 等. 基于hp自适应伪谱法的多脉冲导弹弹道优化设计[J]. 固体火箭技术, 2015, 38(2): 151-155.
MING Chao, SUN Rui-sheng, BAI Hong-yang, et al. Optimizing design of trajectory for multiple-pulse missiles based on hp-adaptive pseudo-spectral method [J]. Journal of Solid Rocket Technology, 2015, 38(2): 151-155.
|
|
|
| [22] |
HUNTINGTON G T, BENSON D A, RAO A V. A comparison of accuracy and computational efficiency of three pseudo-spectral methods [C]// AIAA Guidance, Navigation and Control Conference and Exhibit. South Carolina: AIAA, 2007.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|