|
|
|
| Dual-mechanism tangential obstacle avoidance of autonomous robots in dynamic environment |
Yiming ZHANG1( ),Wenguang YAO2,Haijin CHEN1,*() ),Wenguang YAO2,Haijin CHEN1,*() |
1. Jiangsu Provincial Key Laboratory of Application-Specific Integrated Circuit Design, Nantong University, Nantong 226001, China
2. Atekon Technology Limited Company, Nanjing 210012, China |
|
|
|
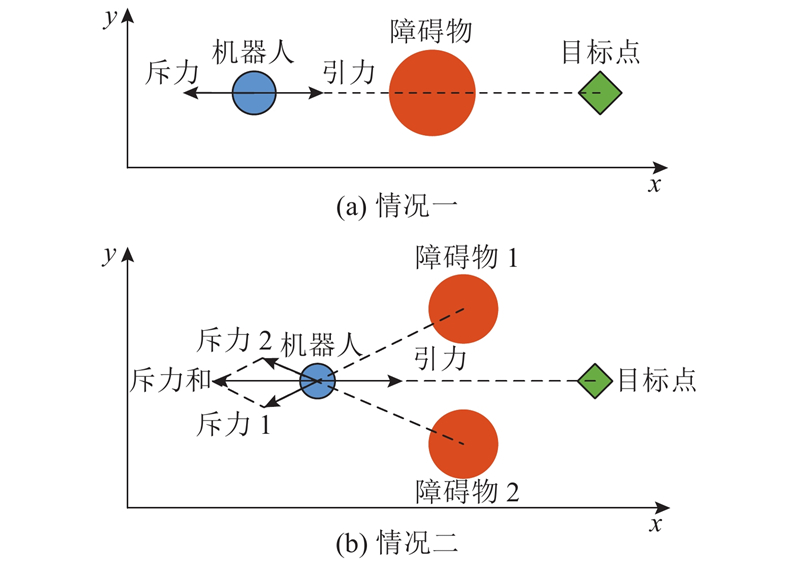
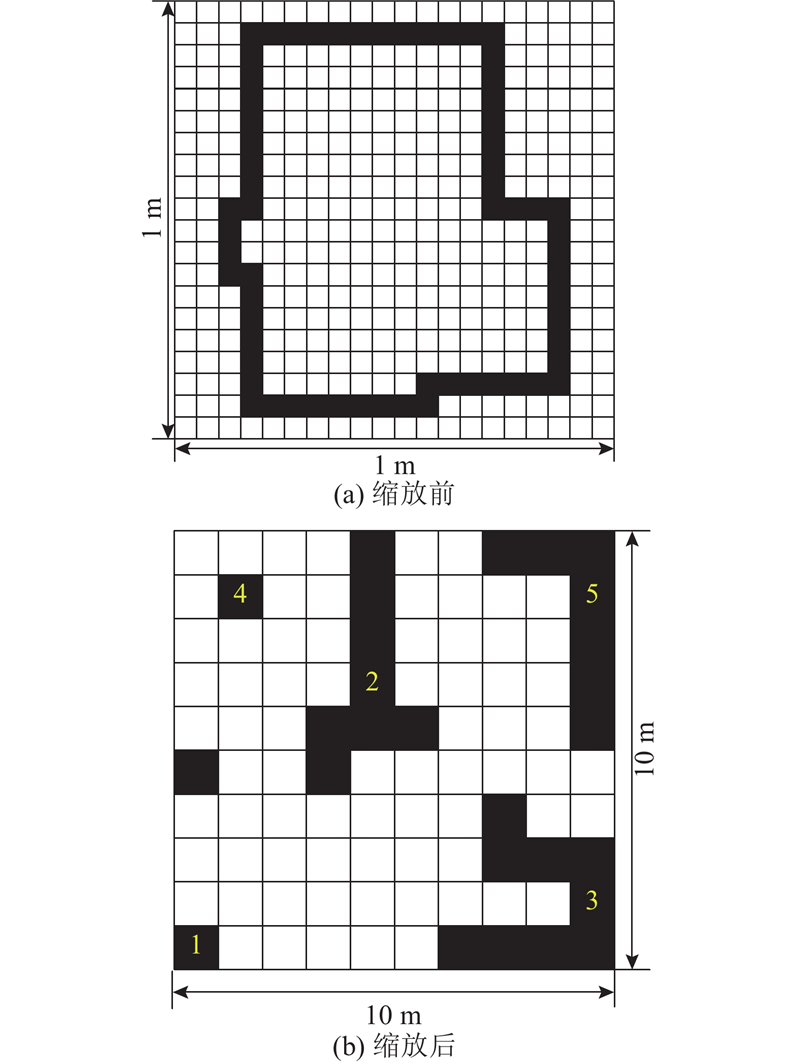
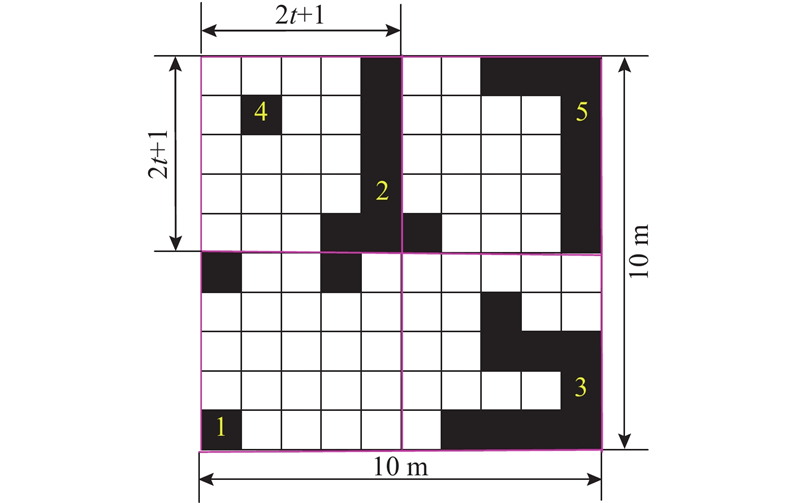
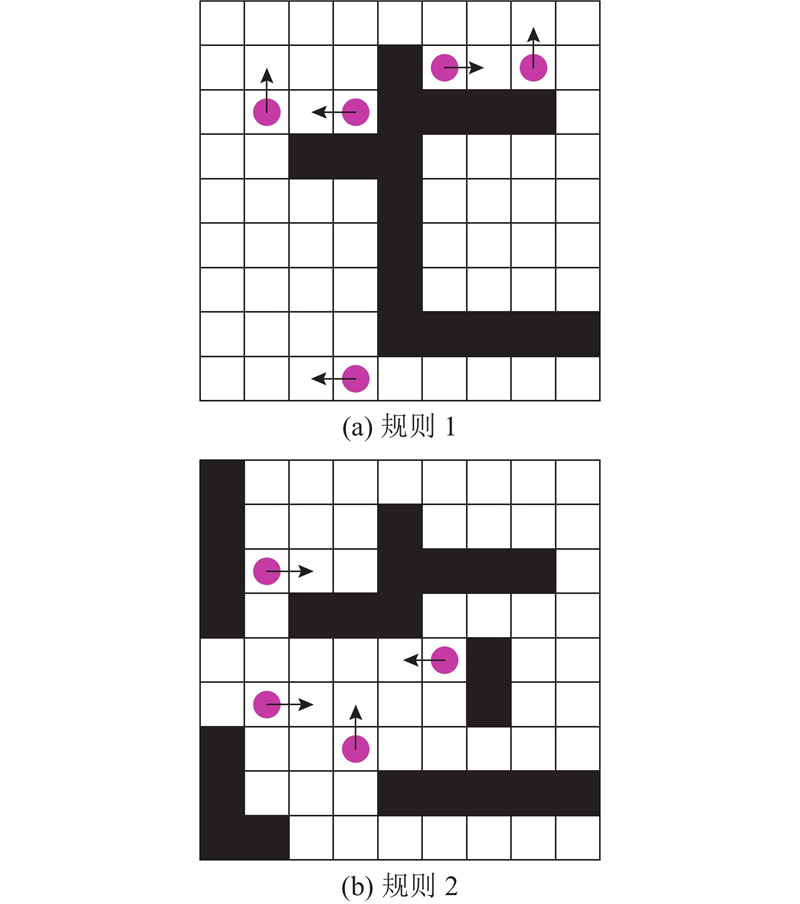
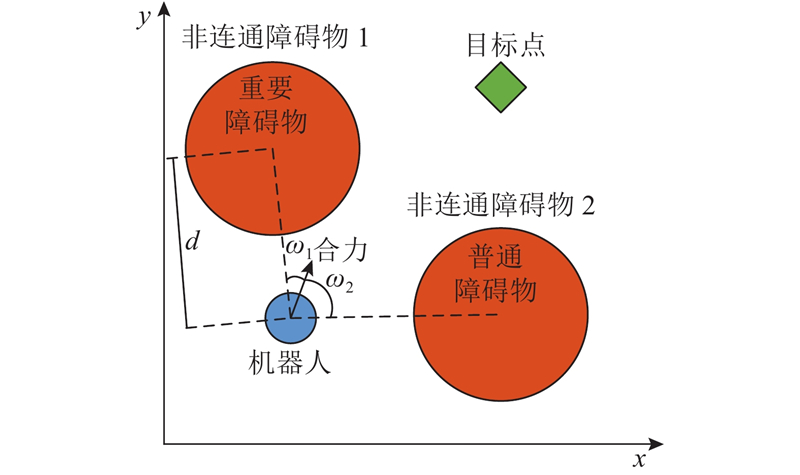
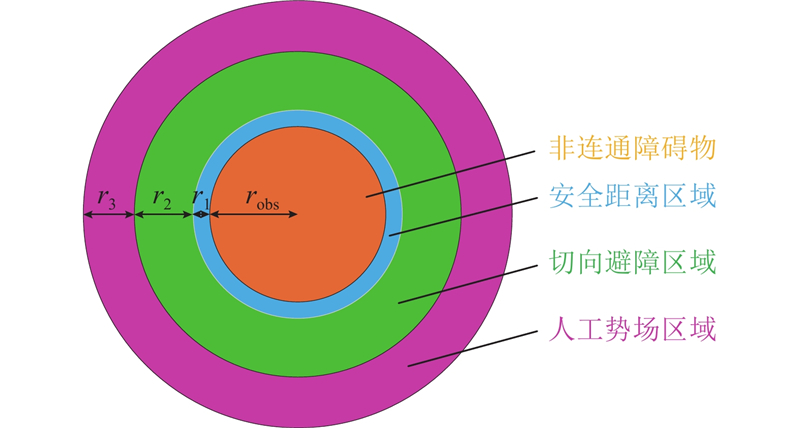
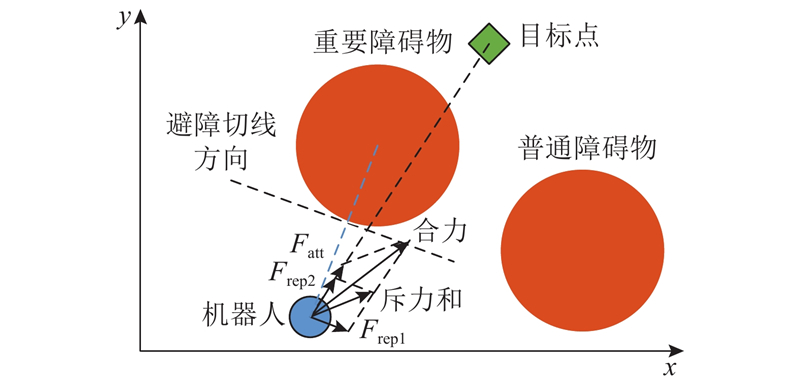
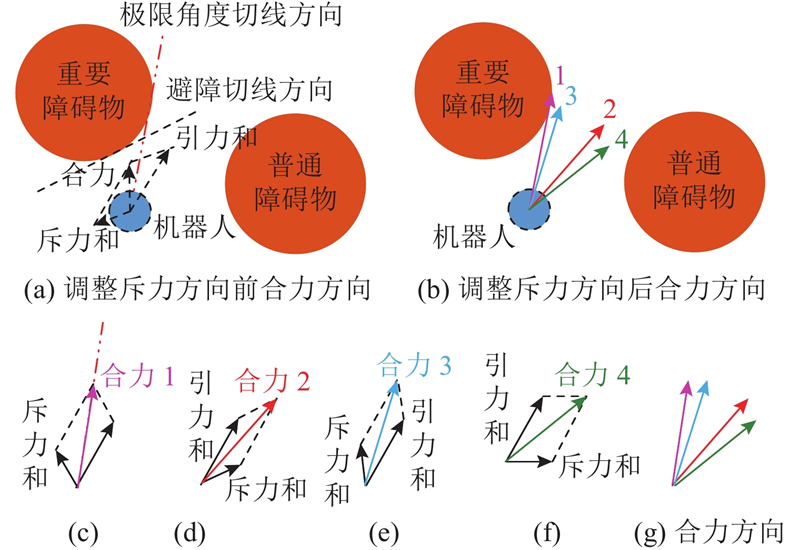
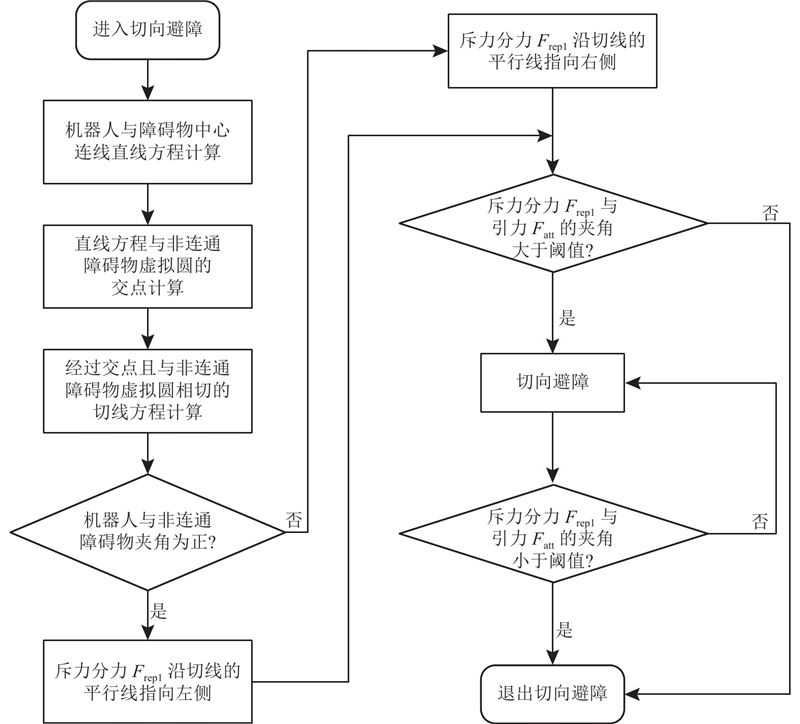
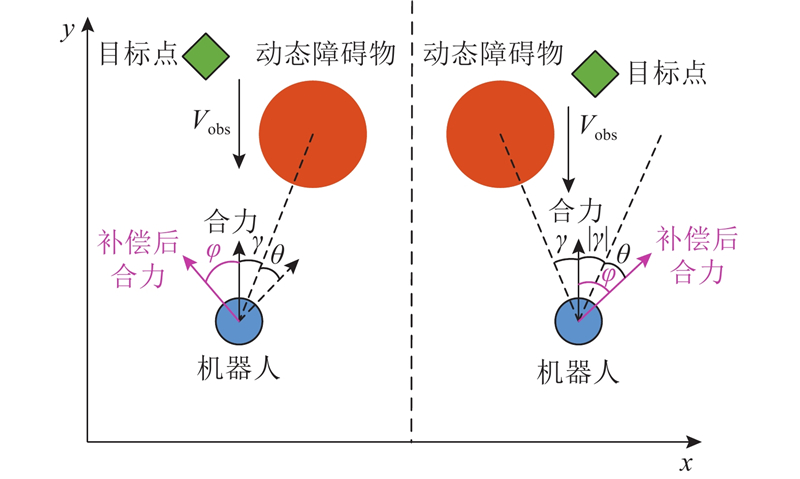
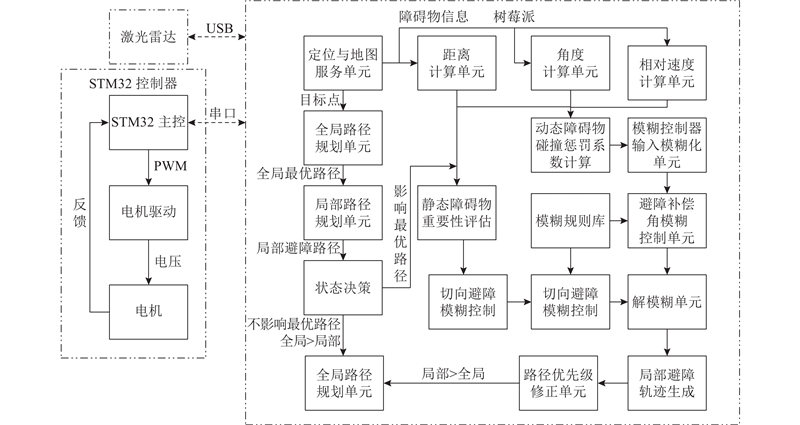
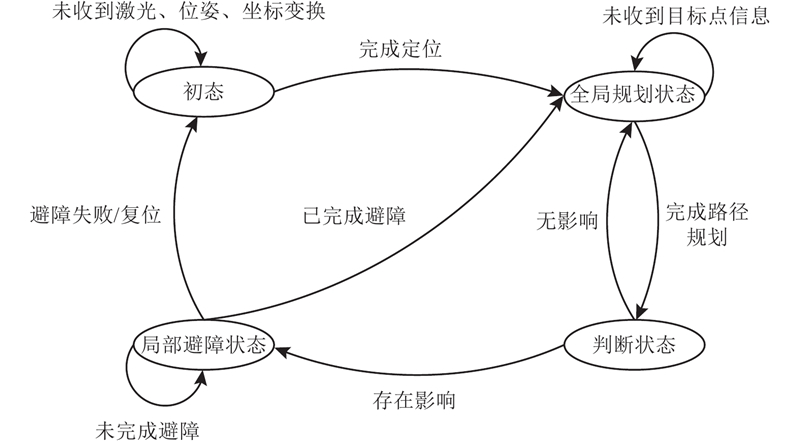
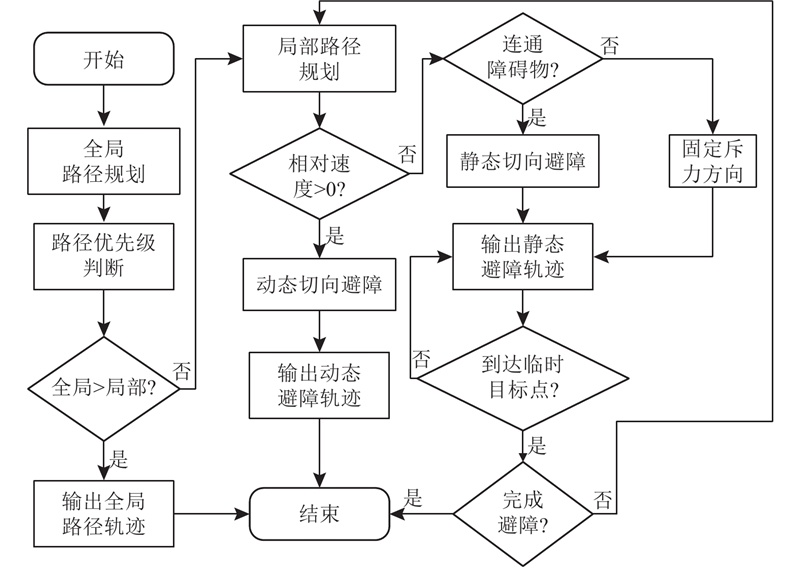
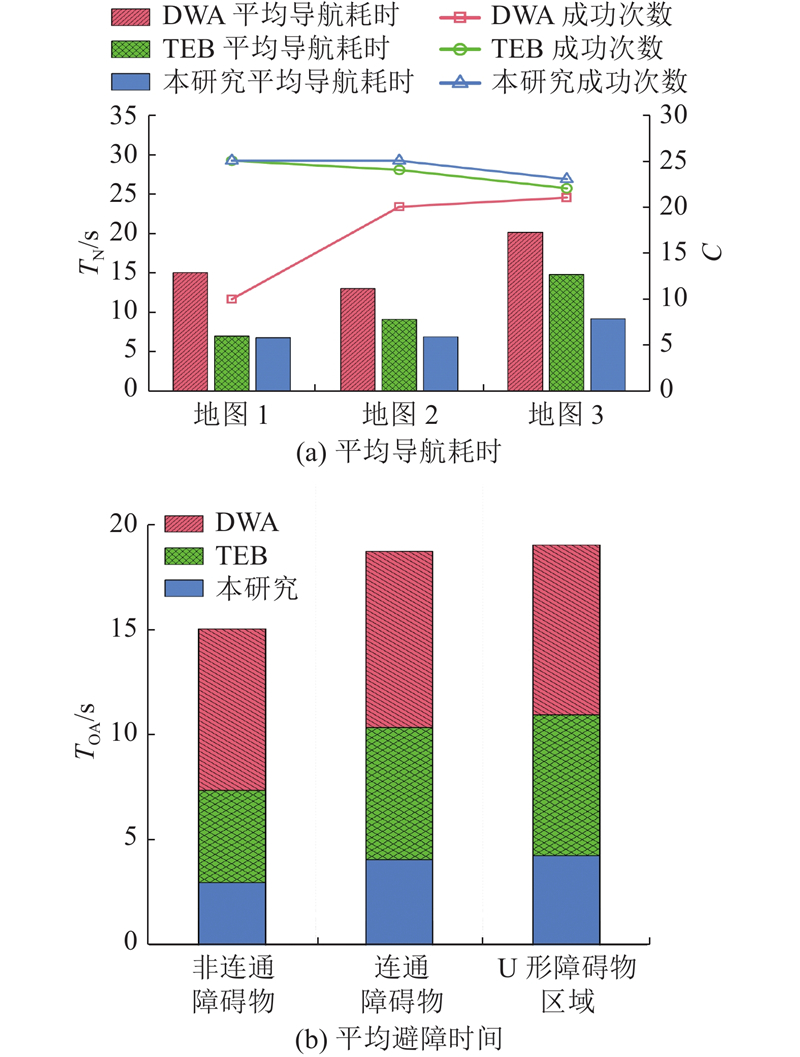
Abstract Aiming at the dynamic randomness of robot working environment, an improved artificial potential field method based on dual-mechanism tangential obstacle avoidance was proposed. Aiming at the local minimum trap of the traditional artificial potential field method, a static obstacle avoidance mechanism was proposed. The map was preprocessed before planning, local minimum points were predicted and obstacles were divided into connected and non-connected, and the static tangential obstacle avoidance was realized by combining the tangential obstacle avoidance. Based on the static obstacle avoidance mechanism, a dynamic obstacle avoidance mechanism was proposed for dynamic obstacles. By adjusting the collision risk coefficient in real time and selecting the obstacle with the largest coefficient for obstacle avoidance angle compensation, the dynamic tangential obstacle avoidance was realized. By state decision making, the static and dynamic tangential obstacle avoidance mechanism and the global path planning were integrated to realize the hybrid planning and design. Simulation and omnidirectional mobile platform was designed, and the proposed method was verified and tested. Results showed that the proposed method effectively resolved the local minimum trap of the traditional artificial potential field method under different complex environments, and realized fast autonomous obstacle avoidance under dynamic environments. Comparing the average obstacle avoidance time of three methods to avoid different types of obstacles, the proposed method was 55% better than the dynamic window approach (DWA) and 40% better than the time elastic band (TEB). Comparing the average navigation time of three methods for navigating maps of different complexity, the proposed method was 39% better than DWA and 22% better than TEB.
|
|
Received: 29 June 2023
Published: 27 March 2024
|
|
|
| Fund: 江苏省科技成果转化专项资金资助项目(BA2022001). |
|
Corresponding Authors:
Haijin CHEN
E-mail: 1242208320@qq.com;chen.hj@ntu.edu.cn
|
动态环境下自主机器人的双机制切向避障
针对机器人工作环境的动态随机性,提出面向双机制切向避障的改进人工势场法. 针对传统人工势场法的局部极小值陷阱问题,提出静态避障机制,在规划开始前对地图进行预处理,预测局部极小值点并将障碍物分成连通与非连通障碍物,结合切向避障实现静态切向避障. 以静态避障机制为基础,针对动态障碍物,提出动态避障机制,通过实时调整碰撞风险系数并选择系数最大的障碍物进行避障角补偿,实现动态切向避障. 通过状态决策统筹静态、动态切向避障机制与全局路径规划,实现混合规划与设计. 设计仿真和全向移动平台,对所提方法进行验证测试. 结果表明,所提方法在不同环境复杂下均有效解决了传统人工势场法的局部极小值陷阱问题,实现了动态环境下快速自主避障. 对比3种方法避开不同类型障碍物的平均耗时,所提方法比动态窗口法(DWA)提升55%,比时间弹性带法(TEB)提升40%;对比3种方法导航不同复杂度地图的平均耗时,所提方法比DWA提升39%,比TEB提升22%.
关键词:
动态环境,
人工势场法,
局部极小值陷阱,
双机制切向避障,
状态决策,
混合规划
|
|
| [12] |
MIN H, LIN Y, WANG S, et al Path planning of mobile robot by mixing experience with modified artificial potential field method[J]. Advances in Mechanical Engineering, 2015, 7 (12): 1- 17
|
|
|
| [13] |
KHATIB O Real time obstacle avoidance for manipulators and mobile robots[J]. International Journal of Robotics Research, 1986, 5 (1): 90- 98
doi: 10.1177/027836498600500106
|
|
|
| [14] |
HAO G, LV Q, HUANG Z, et al UAV path planning based on improved artificial potential field method[J]. Aerospace, 2023, 10 (6): 562
|
|
|
| [15] |
林洁, 张志安 改进人工势场法的路径规划研究[J]. 机械与电子, 2022, 40 (3): 65- 70
LIN Jie, ZHANG Zhi’an Research on path planning of improved artificial potential field[J]. Machinery and Electronics, 2022, 40 (3): 65- 70
|
|
|
| [16] |
ZHENG Y, SHAO X, CHEN Z, et al Improvements on the virtual obstacle method[J]. International Journal of Advanced Robotic Systems, 2020, 17 (2): 1- 9
|
|
|
| [1] |
TAN C S, MOHD-MOKHTAR R, ARSHAD M R A comprehensive review of coverage path planning in robotics using classical and heuristic algorithms[J]. IEEE Access, 2021, 9: 119310- 119342
doi: 10.1109/ACCESS.2021.3108177
|
|
|
| [2] |
SÁNCHEZ-LBÁÑEZ J R, PÉREZ-DEL-PULGAR C J, GARCÍA-CEREZO A Path planning for autonomous mobile robots: a review[J]. Sensors, 2021, 21 (23): 7898
doi: 10.3390/s21237898
|
|
|
| [3] |
MOLINOS E J, LLAMAZARES Á, OCAÑA M Dynamic window based approaches for avoiding obstacles in moving[J]. Robotics and Autonomous Systems, 2019, 118: 112- 130
doi: 10.1016/j.robot.2019.05.003
|
|
|
| [4] |
代婉玉, 张丽娟, 吴佳峰, 等 改进TEB算法的局部路径规划算法研究[J]. 计算机工程与应用, 2022, 58 (8): 283- 288
DAI Wanyu, ZHANG Lijuan, WU Jiafeng, et al Research on local path planning algorithm based on improved TEB algorithm[J]. Computer Engineering and Applications, 2022, 58 (8): 283- 288
|
|
|
| [5] |
SZCZEPANSKI R Safe artificial potential field: novel local path planning algorithm maintaining safe distance from obstacles[J]. IEEE Robotics and Automation Letters, 2023, 8 (8): 4823- 4830
doi: 10.1109/LRA.2023.3290819
|
|
|
| [6] |
MA H, PEI W, ZHANG Q Research on path planning algorithm for driverless vehicles[J]. Mathematics, 2022, 10 (15): 2555
|
|
|
| [7] |
AZZABI A, NOURI K An advanced potential field method proposed for mobile robot path planning[J]. Transactions of the Institute of Measurement and Control, 2019, 41 (11): 3132- 3144
doi: 10.1177/0142331218824393
|
|
|
| [8] |
YANG W, WU P, ZHOU X, et al Improved artificial potential field and dynamic window method for amphibious robot fish path planning[J]. Applied Sciences, 2021, 11 (5): 2114
doi: 10.3390/app11052114
|
|
|
| [9] |
TONG X, YU S, LIU G, et al A hybrid formation path planning based on A* and multi-target improved artificial potential field algorithm in the 2D random[J]. Advanced Engineering Informatics, 2022, 54: 101755
doi: 10.1016/j.aei.2022.101755
|
|
|
| [10] |
LUO J, WANG Z X, PAN K L Reliable path planning algorithm based on improved artificial potential field method[J]. IEEE Access, 2022, 10: 108276- 108284
doi: 10.1109/ACCESS.2022.3212741
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|