|
|
|
| Dynamic RGB-D SLAM algorithm based on reprojection depth difference cumulative map and static probability |
Kai LIN( ),Xin-wu LIANG*(),Ji-yuan CAI ),Xin-wu LIANG*(),Ji-yuan CAI |
| School of Aeronautics and Astronautics, Shanghai Jiao Tong University, Shanghai 200240, China |
|
|
|
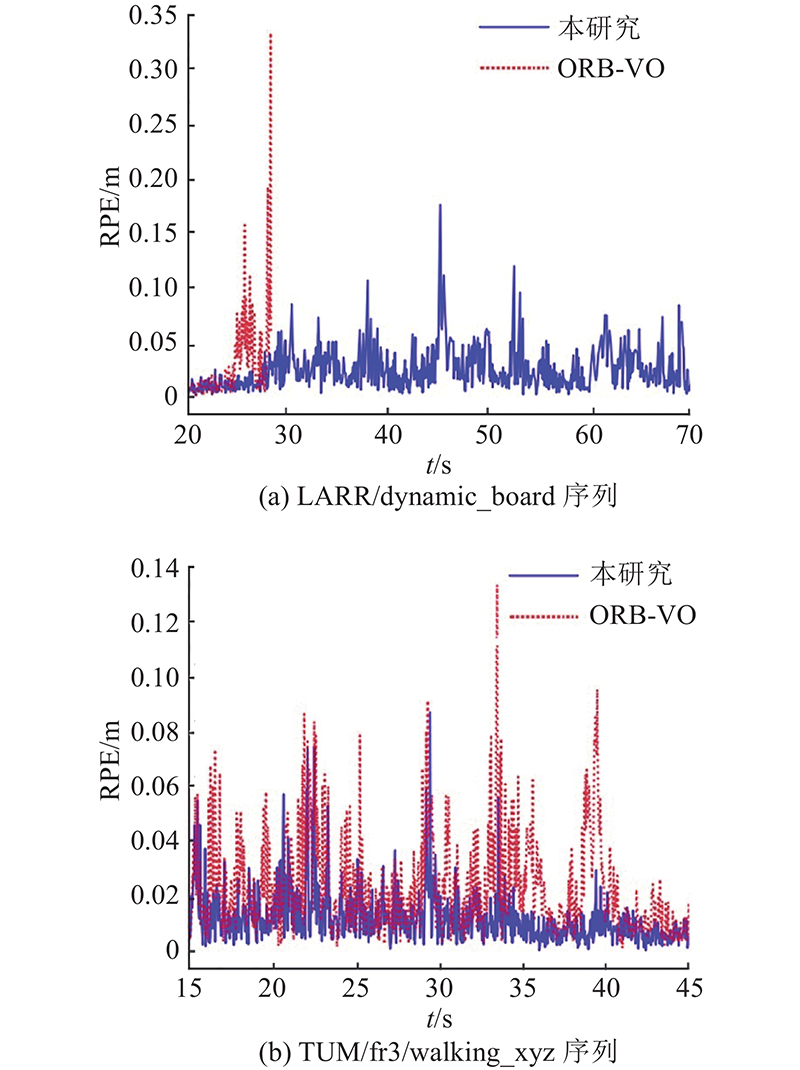
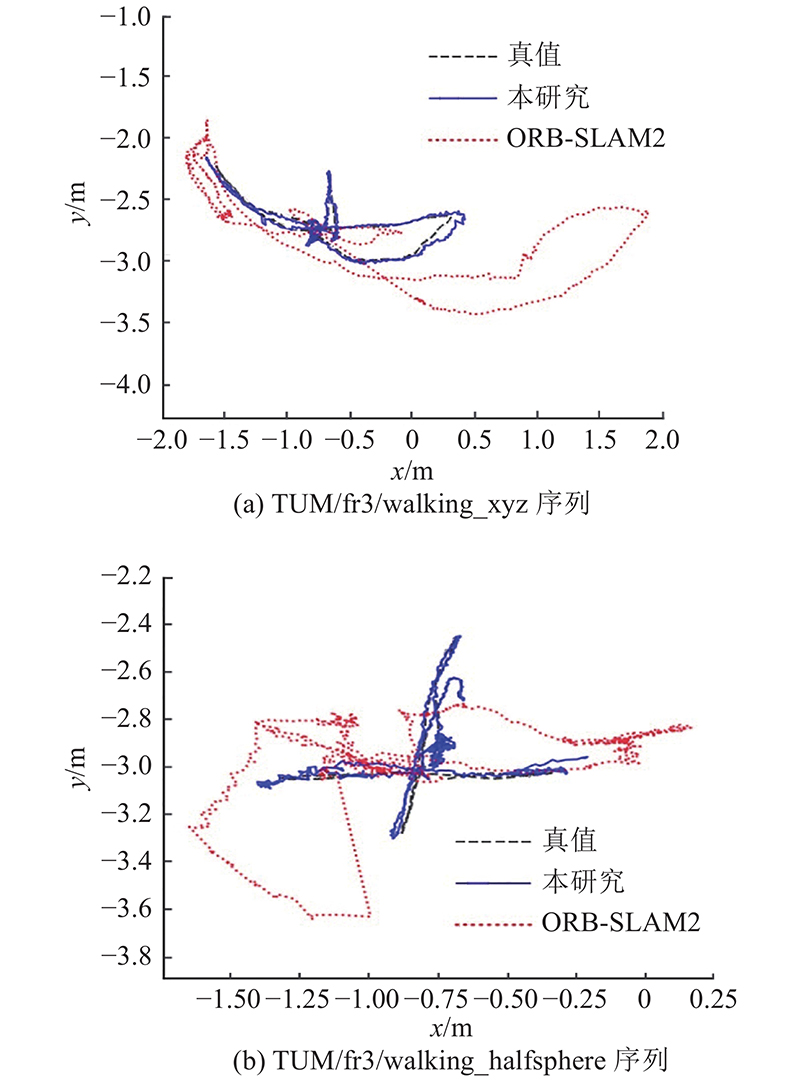
Abstract To improve the localization accuracy and the robustness of simultaneous localization and mapping (SLAM) in dynamic scenes, a new RGB-D SLAM algorithm was proposed. Firstly, a cumulative model based on the reprojection depth difference was built to segment the dynamic and static region in the image. Secondly, to avoid over-segmentation, the feature points in the dynamic region whose Euclidean distances were too large from the matching map point were eliminated. The static probabilities of other feature points were estimated according to the t-distribution. Finally, the feature points in the static region and the suspected static points in the dynamic region were added into the pose optimization with different weights to refine the pose. Experiments with public datasets showed that in dynamic scenes, the localization accuracy of the proposed method was improved by 96.1% compared with RGB-D ORB-SLAM2 and 31.2% compared with other dynamic SLAM algorithms. The localization accuracy and robustness of the visual SLAM system in dynamic scenes were effectively improved.
|
|
Received: 28 April 2021
Published: 30 June 2022
|
|
|
| Fund: 国家自然科学基金资助项目(62173230) |
|
Corresponding Authors:
Xin-wu LIANG
E-mail: link013@sjtu.edu.cn;xinwuliang@sjtu.edu.cn
|
基于重投影深度差累积图与静态概率的动态RGB-D SLAM算法
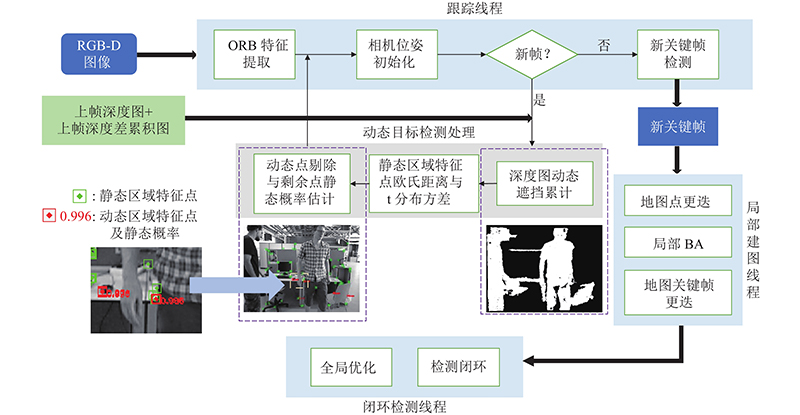
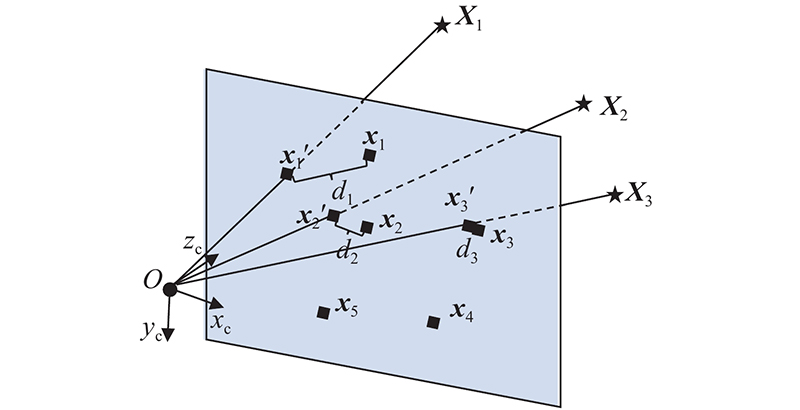
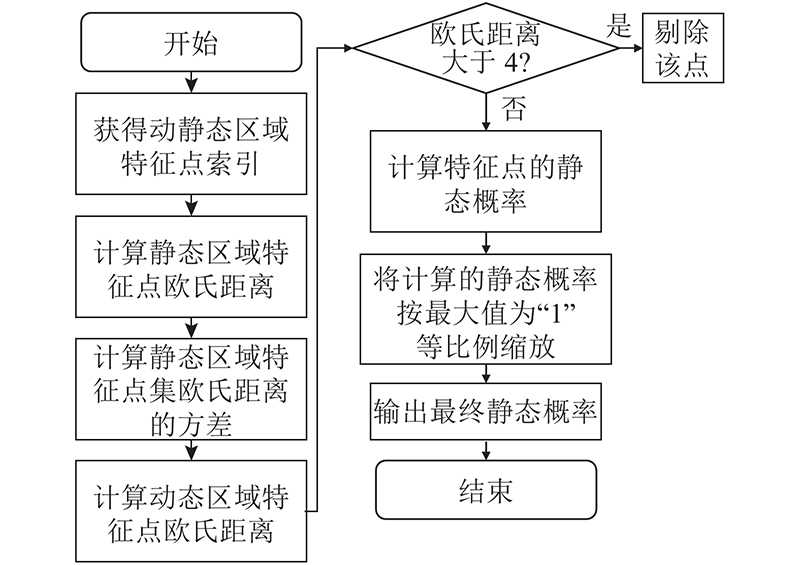
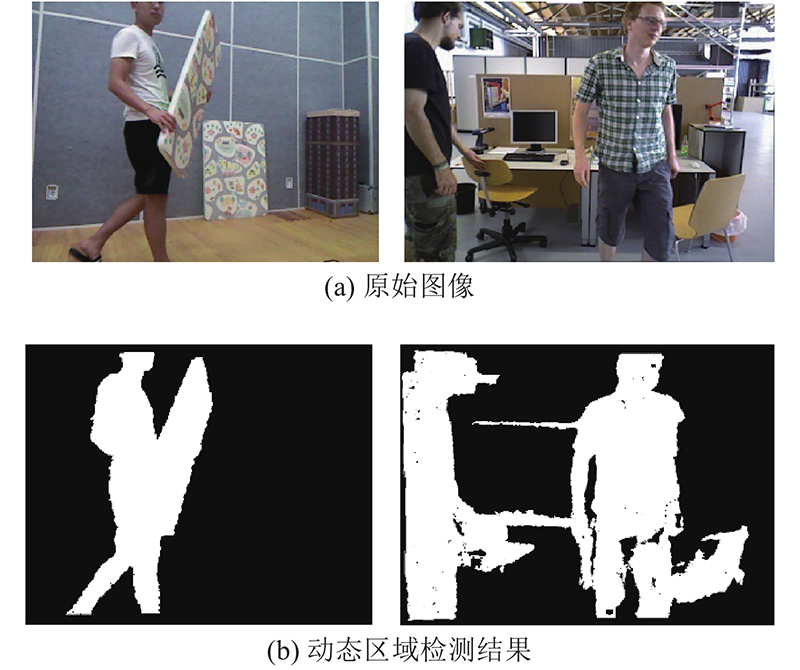
为了提高同时定位与建图(SLAM)系统在动态场景下的定位精度和鲁棒性,提出新的RGB-D SLAM算法. 建立基于重投影深度差值的累积模型,分割图像的动静态区域;为了避免动态区域过分割,先剔除与匹配地图点欧氏距离过大的动态区域特征点,再根据t分布估计其余特征点的静态概率;将静态区域特征点和动态区域的疑似静态点以不同权重加入位姿优化,得到提纯后的位姿. 在公开数据集上的实验结果表明,所提算法在动态场景下较改进前的RGB-D ORB-SLAM2算法的定位精度提升96.1%,较其他动态SLAM算法提升31.2%,有效提高了视觉SLAM系统在动态环境下的定位精度和鲁棒性.
关键词:
动态环境,
视觉SLAM,
RGB-D相机,
重投影深度差累积图,
静态概率
|
|
| [1] |
FISCHLER M A, BOLLES R C Random sample consensus: a paradigm for model fitting with applications to image analysis and automated cartography[J]. Communications of the ACM, 1981, 24 (6): 381- 395
doi: 10.1145/358669.358692
|
|
|
| [2] |
TRIGGS B, MCLAUCHLAN P F, HARTLEY R I, et al. Bundle adjustment: a modern synthesis [M]// TRIGGS B, ZISSERMAN A, SZELISKI R. Vision algorithms: theory and practice. [S. l.]: Springer, 1999: 298-372.
|
|
|
| [3] |
高成强, 张云洲, 王晓哲, 等 面向室内动态环境的半直接法RGB-D SLAM算法[J]. 机器人, 2019, 41 (3): 372- 383
GAO Cheng-qiang, ZHANG Yun-zhou, WANG Xiao-zhe, et al Semi-direct RGB-D SLAM algorithm for dynamic indoor environments[J]. Robot, 2019, 41 (3): 372- 383
|
|
|
| [4] |
SUN Y, LIU M, MENG M Q H Improving RGB-D SLAM in dynamic environments: a motion removal approach[J]. Robotics and Autonomous Systems, 2017, 89: 110- 122
doi: 10.1016/j.robot.2016.11.012
|
|
|
| [5] |
魏彤, 李绪 动态环境下基于动态区域剔除的双目视觉SLAM算法[J]. 机器人, 2020, 42 (3): 336- 345
WEI Tong, LI Xu Binocular vision SLAM algorithm based on dynamic region elimination in dynamic environment[J]. Robot, 2020, 42 (3): 336- 345
|
|
|
| [6] |
ZHONG F, WANG S, ZHANG Z, et al. Detect-SLAM: making object detection and SLAM mutually beneficial [C]// 2018 IEEE Winter Conference on Applications of Computer Vision. Lake Tahoe: IEEE, 2018: 1001-1010.
|
|
|
| [7] |
BESCOS B, FACIL J M, CIVERA J, et al DynaSLAM: tracking, mapping, and inpainting in dynamic scenes[J]. IEEE Robotics and Automation Letters, 2018, 3 (4): 4076- 4083
doi: 10.1109/LRA.2018.2860039
|
|
|
| [8] |
YU C, LIU Z, LIU X, et al. DS-SLAM: a semantic visual SLAM towards dynamic environments [C]// 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems. Madrid: IEEE, 2018: 1168-1174.
|
|
|
| [9] |
YUAN X, CHEN S. SaD-SLAM: a visual SLAM based on semantic and depth information [C]// 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems. Las Vegas: IEEE, 2020: 4930-4935.
|
|
|
| [10] |
ZHANG T, ZHANG H, NAKAMURA Y, et al. FlowFusion: dynamic dense RGB-D SLAM based on optical flow [C]// 2020 IEEE International Conference on Robotics and Automation. Paris: IEEE, 2020: 7322-7328.
|
|
|
| [11] |
艾青林, 刘刚江, 徐巧宁 动态环境下基于改进几何与运动约束的机器人RGB-D SLAM算法[J]. 机器人, 2021, 43 (2): 167- 176
AI Qing-lin, LIU Gang-jiang, XU Qiao-ning An RGB-D SLAM algorithm for robot based on the improved geometric and motion constraints in dynamic environment[J]. Robot, 2021, 43 (2): 167- 176
|
|
|
| [12] |
DAI W, ZHANG Y, LI P, et al RGB-D SLAM in dynamic environments using point correlations[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2020, 44 (1): 373- 389
|
|
|
| [13] |
LI S, LEE D RGB-D SLAM in dynamic environments using static point weighting[J]. IEEE Robotics and Automation Letters, 2017, 2 (4): 2263- 2270
doi: 10.1109/LRA.2017.2724759
|
|
|
| [14] |
KIM H, KIM P, KIM H J. Moving object detection for visual odometry in a dynamic environment based on occlusion accumulation [C]// 2020 IEEE International Conference on Robotics and Automation. Paris: IEEE, 2020: 8658-8664.
|
|
|
| [15] |
MUR-ARTAL R, TARDOS J D ORB-SLAM2: an open-source SLAM system for monocular, stereo, and RGB-D cameras[J]. IEEE Transactions on Robotics, 2017, 33 (5): 1255- 1262
doi: 10.1109/TRO.2017.2705103
|
|
|
| [16] |
胡泽周 Kinect深度传感器深度误差分析和修正方法的研究[J]. 测绘通报, 2019, (Suppl.2): 239- 241
HU Ze-zhou Research on depth error analysis and correction method of Kinect depth sensor[J]. Bulletin of Surveying and Mapping, 2019, (Suppl.2): 239- 241
|
|
|
| [17] |
KERL C, STURM J, CREMERS D. Dense visual SLAM for RGB-D cameras [C]// 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems. Tokyo: IEEE, 2014: 2100-2106.
|
|
|
| [18] |
KUMMERLE R, GRISETTI G, STRASDAT H, et al. g2o: a general framework for graph optimization [C]// 2011 IEEE International Conference on Robotics and Automation. Shanghai: IEEE, 2011: 3607-3013.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|