|
|
|
| Structure design and motion analysis of bionic hexapod origami robot |
Dongxing CAO1,2( ),Yanchao JIA2,3,Xiangying GUO1,2,Jiajia MAO1,2 ),Yanchao JIA2,3,Xiangying GUO1,2,Jiajia MAO1,2 |
1. School of Mathematics Statistics and Mechanic, Beijing University of Technology, Beijing 100124, China
2. Beijing Key Laboratory of Nonlinear Vibrations and Strength of Mechanical Structures, Beijing University of Technology, Beijing 100124, China
3. School of Mechanical and Energy Engineering, Beijing University of Technology, Beijing 100124, China |
|
|
|
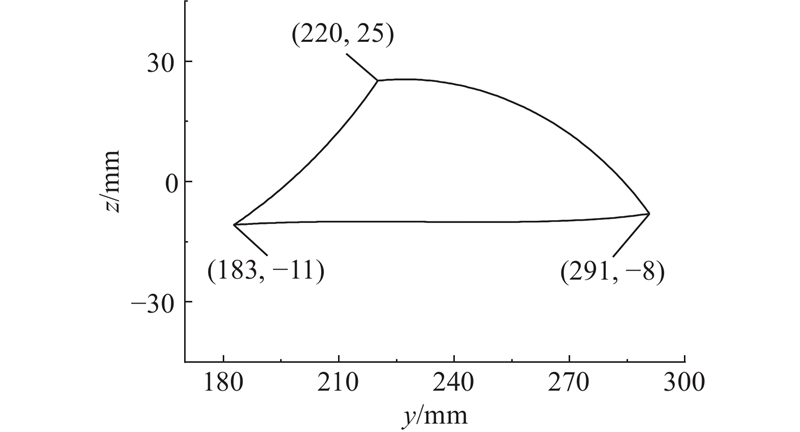
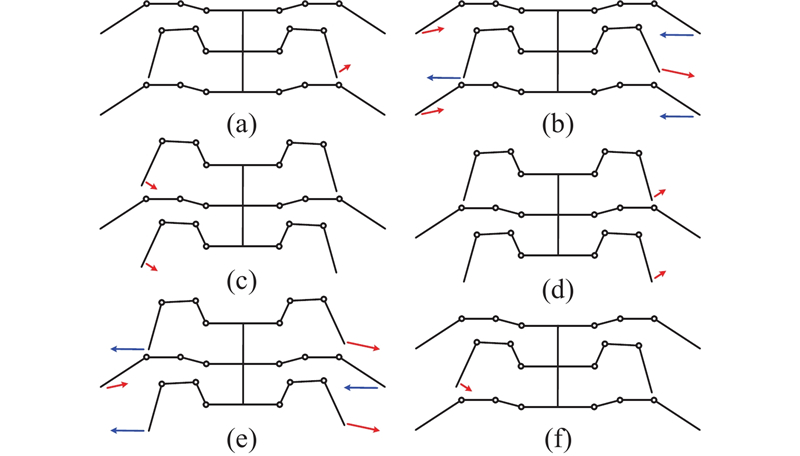
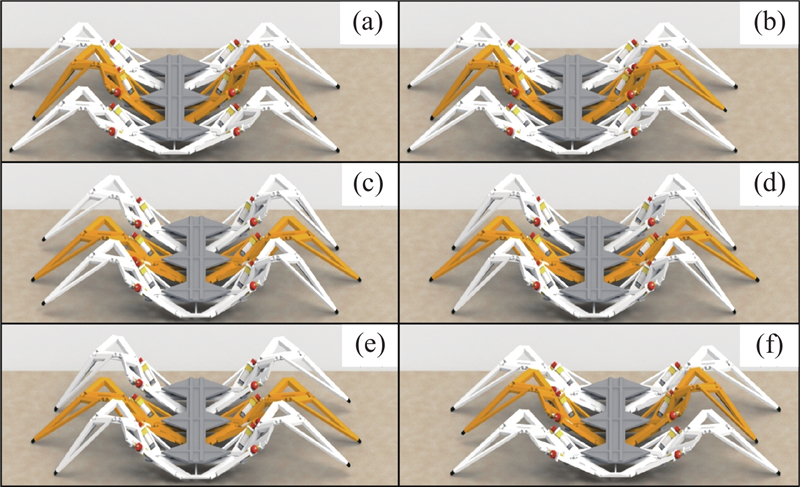
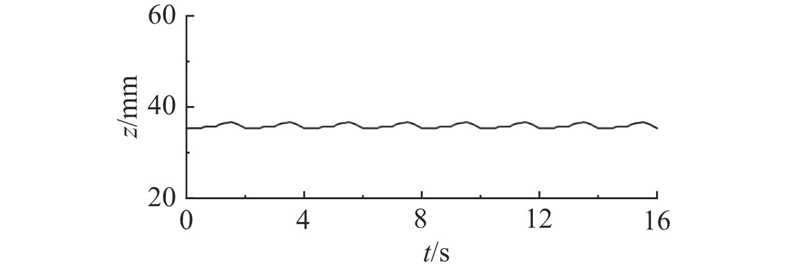
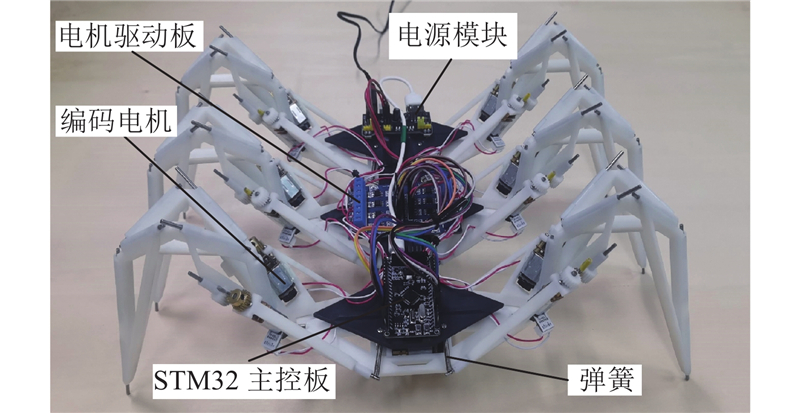
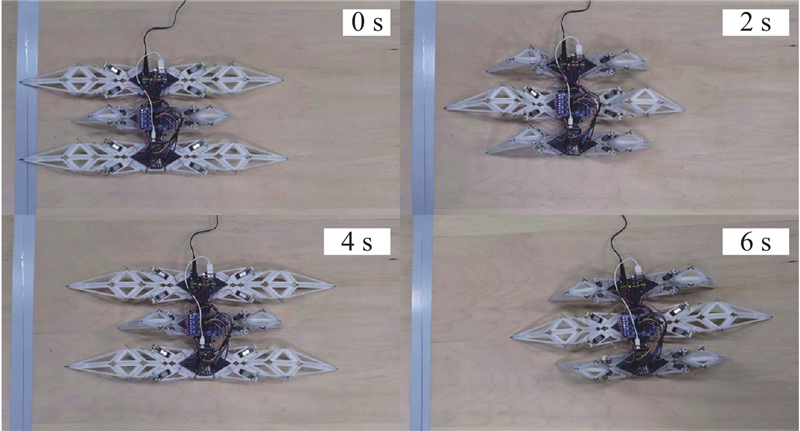
Abstract A new design scheme of crab-like hexapod origami robot was proposed by combining the origami structure with the multi-legged robot design and coupling Miura origami and six-fold origami aiming at the problems that the existing origami robots have a single structure and insufficient flexibility in movement. The motion configuration of the origami robot was expanded, and the motion flexibility of the origami robot was improved. Each leg of the robot has two degrees of freedom under the symmetry hypothesis. The vertices of the robot legs were treated as joints, and the crease lines were regarded as links. A planar link equivalent model of the robot legs was established with the folding angle as the motion variable. The theoretical range of motion for the robot’s foot was determined through simulation calculations. Then tapered panel technique was utilized to thicken the folding surfaces and prevent physical interference between adjacent folding surfaces. A three-dimensional model of the origami crab-like hexapod robot was constructed. The relationship between the folding angle and foot motion was analyzed based on the equivalent model of planar links, and the foot motion trajectory and gait of the robot were designed. The experimental prototype of origami bionic hexapod robot was designed and manufactured by using 3D printing technology, and the lateral movement of the robot was realized based on STM32 microcontroller control. Results show that the origami bio-inspired robot can realize the conversion from plane configuration to a crab-like configuration. The robot can move smoothly left and right under the coordinated movement of six legs.
|
|
Received: 01 April 2024
Published: 23 July 2024
|
|
|
| Fund: 国家自然科学基金资助项目(U2241264,11972051). |
仿生六足折纸机器人结构设计与运动分析
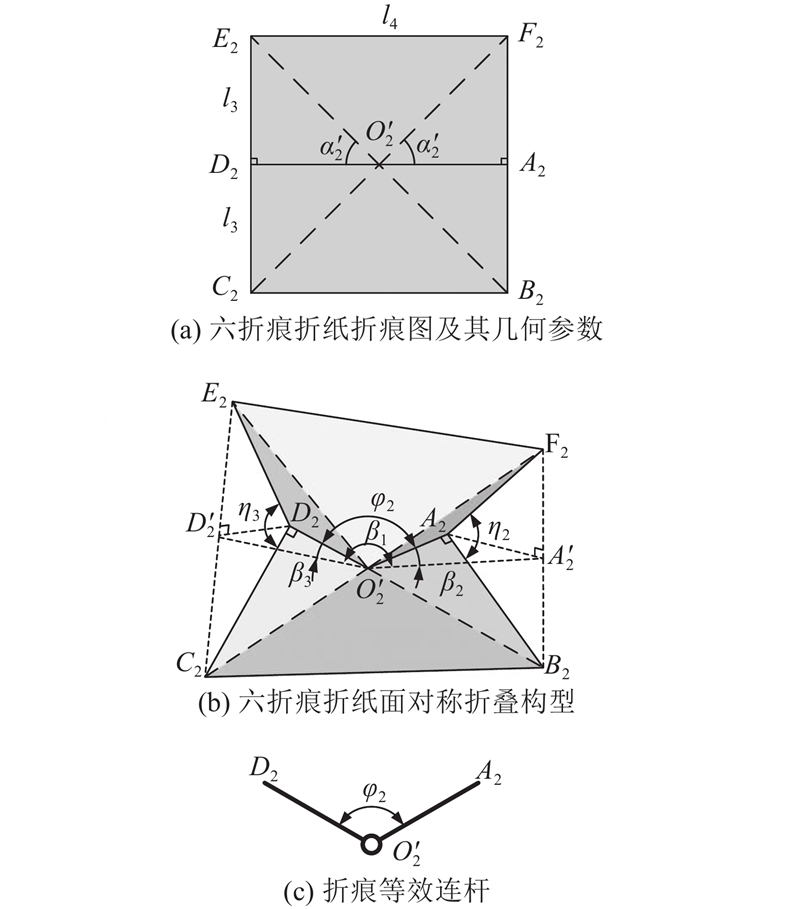
针对现有折纸机器人组成结构单一,运动不够灵活的问题,将折纸结构与多足机器人设计相结合,耦合三浦折纸和六折痕折纸,提出新型的仿螃蟹六足折纸机器人设计方案,扩展了折纸机器人的运动构型,提升了折纸机器人的运动灵活性. 在面对称假设下,该机器人单足具有2个自由度,此时将机器人腿部顶点等效为关节,轴线折痕等效为连杆,建立机器人腿部的平面连杆等效模型,并以折面夹角为运动变量,通过仿真计算得出机器人足端的理论运动范围. 利用楔形面板技术对折面增厚并避免相邻折面发生物理干涉,建模得到折纸仿螃蟹六足机器人的三维模型. 基于平面连杆的等效模型,分析折面夹角与足端运动之间的联系,设计确定机器人的足端运动轨迹与运动步态. 利用3D打印技术设计并制作折纸仿生六足机器人试验样机,基于STM32单片机控制实现了机器人三横向角步态运动. 结果表明,该折纸仿生机器人可以实现平面构型到仿螃蟹构型的转换,在6条腿的协同运动下,机器人可以平稳地左右横向移动.
关键词:
六足机器人,
仿生,
六折痕折纸,
三浦折纸,
运动分析
|
|
| [1] |
CHEN Y, FENG H, MA J, et al Symmetric waterbomb origami[J]. Proceedings: Mathematical, Physical and Engineering Sciences, 2016, 472 (2190): 20150846
|
|
|
| [2] |
李笑, 李明 折纸及其折痕设计研究综述[J]. 力学学报, 2018, 50 (3): 467- 476
LI Xiao, LI Ming A review of origami and its crease design[J]. Chinese Journal of Theoretical and Applied Mechanics, 2018, 50 (3): 467- 476
|
|
|
| [3] |
方虹斌, 吴海平, 刘作林, 等 折纸结构和折纸超材料动力学研究进展[J]. 力学学报, 2022, 54 (1): 1- 38
FANG Hongbin, WU Haiping, LIU Zuolin, et al Advances in the dynamics of origami structures and origami metamaterials[J]. Chinese Journal of Theoretical and Applied Mechanics, 2022, 54 (1): 1- 38
|
|
|
| [4] |
陈焱, 顾元庆 折纸运动学综述[J]. 力学进展, 2023, 53 (1): 154- 197
CHEN Yan, GU Yuanqing Review on origami kinematics[J]. Advances in Mechanics, 2023, 53 (1): 154- 197
|
|
|
| [5] |
DAI J S, JONES J R Mobility in metamorphic mechanisms of foldable/erectable kinds[J]. Journal of Mechanical Design, 1999, 121 (3): 375- 382
doi: 10.1115/1.2829470
|
|
|
| [6] |
DAI J S, JONES J R Kinematics and mobility analysis of carton folds in packing manipulation based on the mechanism equivalent[J]. Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science, 2002, 216 (10): 959- 970
doi: 10.1243/095440602760400931
|
|
|
| [7] |
DAI J S, JONES J R Matrix representation of topological changes in metamorphic mechanisms[J]. Journal of Mechanical Design, 2005, 127 (4): 837- 840
doi: 10.1115/1.1866159
|
|
|
| [8] |
冯慧娟, 马家耀, 陈焱 广义Waterbomb折纸管的刚性折叠运动特性[J]. 机械工程学报, 2020, 56 (19): 143- 159
FENG Huijuan, MA Jiayao, CHEN Yan Rigid folding of generalized Waterbomb origami tubes[J]. Journal of Mechanical Engineering, 2020, 56 (19): 143- 159
doi: 10.3901/JME.2020.19.143
|
|
|
| [9] |
WANG G, WANG J, YAO Y, et al Research on programmable spatial capture mechanism and its motion characteristics based on origami principle[J]. Mechanism and Machine Theory, 2023, 181: 105179
doi: 10.1016/j.mechmachtheory.2022.105179
|
|
|
| [10] |
FELTON S, TOLLEY M, DEMAINE E, et al A method for building self-folding machines[J]. Science, 2014, 345 (6197): 644- 646
doi: 10.1126/science.1252610
|
|
|
| [11] |
KAMRAVA S, MOUSANEZHAD D, FELTON S M, et al Programmable origami strings[J]. Advanced Materials Technologies, 2018, 3 (3): 1700276
doi: 10.1002/admt.201700276
|
|
|
| [12] |
RUS D, SUNG C Spotlight on origami robots[J]. Science Robotics, 2018, 3 (15): eaat0938
doi: 10.1126/scirobotics.aat0938
|
|
|
| [13] |
冯慧娟, 杨名远, 姚国强, 等 折纸机器人[J]. 中国科学: 技术科学, 2018, 48 (12): 1259- 1274
FENG Huijuan, YANG Mingyuan, YAO Guoqiang, et al Origami robots[J]. Scientia Sinica Technologica, 2018, 48 (12): 1259- 1274
doi: 10.1360/N092018-00213
|
|
|
| [14] |
FAAL S G, CHEN F, TAO W, et al Hierarchical kinematic design of foldable hexapedal locomotion platforms[J]. Journal of Mechanisms and Robotics, 2016, 8 (1): 011005
doi: 10.1115/1.4030468
|
|
|
| [15] |
江新阳, 许勇, 王艳, 等 基于折纸机构设计的新型行走机器人[J]. 机械传动, 2021, 45 (5): 66- 74
JIANG Xinyang, XU Yong, WANG Yan, et al Novel walking robot based on the design of origami mechanism[J]. Journal of Mechanical Transmission, 2021, 45 (5): 66- 74
|
|
|
| [16] |
GU Y, WEI G, CHEN Y Thick-panel origami cube[J]. Mechanism and Machine Theory, 2021, 164: 104411
doi: 10.1016/j.mechmachtheory.2021.104411
|
|
|
| [17] |
PENG R, CHIRIKJIAN G S A methodology for thick-panel origami pattern design[J]. Mechanism and Machine Theory, 2023, 189: 105423
doi: 10.1016/j.mechmachtheory.2023.105423
|
|
|
| [18] |
EDMONDSON B, LANG R, MORGAN M, et al Thick rigidly foldable structures realized by an offset panel technique[J]. Origami6: I Mathematics, 2015, 1: 149- 161
|
|
|
| [19] |
CHEN Y, PENG R, YOU Z Origami of thick panels[J]. Science, 2015, 349: 396- 400
doi: 10.1126/science.aab2870
|
|
|
| [20] |
徐小云, 颜国正, 丁国清 微型六足仿生机器人及其三角步态的研究[J]. 光学精密工程, 2002, 10 (4): 392- 396
XU Xiaoyun, YAN Guozheng, DING Guoqing Research on miniature hexapod bio-robot and its tri pod gait[J]. Optics and Precision Engineering, 2002, 10 (4): 392- 396
|
|
|
| [21] |
刘连蕊, 张泽, 高建华 六足机器人横向行走步态研究[J]. 浙江理工大学学报, 2011, 28 (2): 225- 229
LIU Lianrui, ZHANG Ze, GAO Jianhua Signal processing method of the laser heterodyne interferometry based on DSP[J]. Journal of Zhejiang SciTech University, 2011, 28 (2): 225- 229
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|