|
|
|
| Light-weight algorithm for real-time robotic grasp detection |
Mingjun SONG( ),Wen YAN,Yizhao DENG,Junran ZHANG,Haiyan TU*() ),Wen YAN,Yizhao DENG,Junran ZHANG,Haiyan TU*() |
| 1. College of Electrical Engineering, Sichuan University, Chengdu 610065, China |
|
|
|
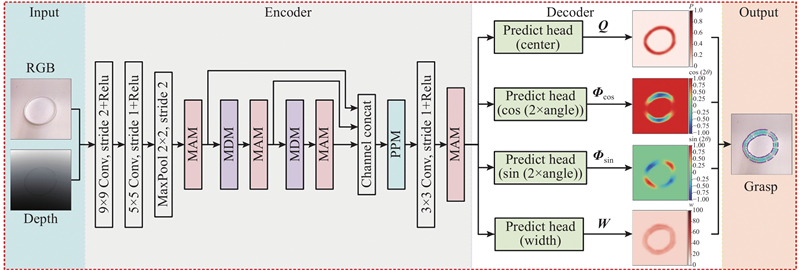
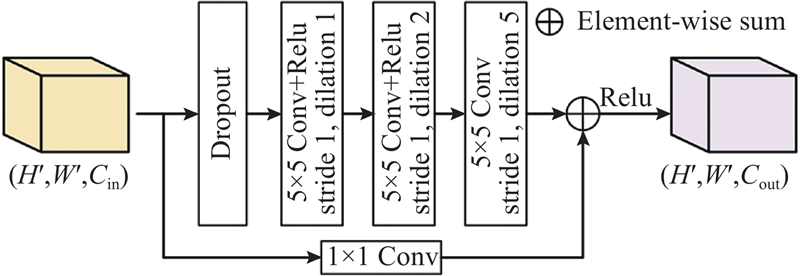
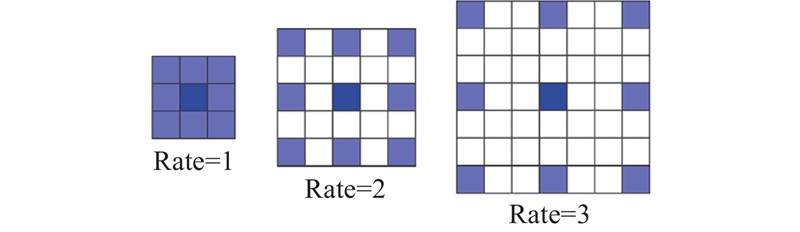
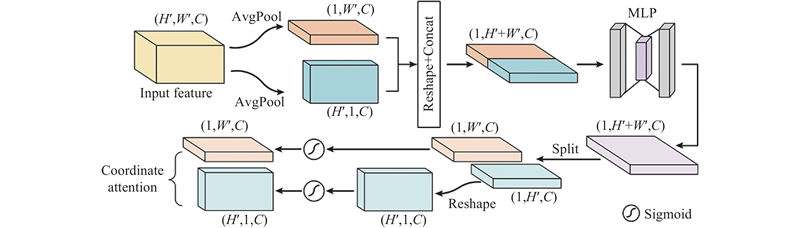
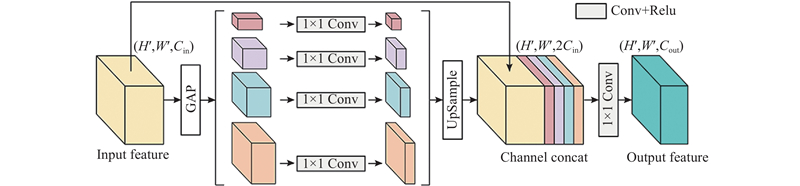
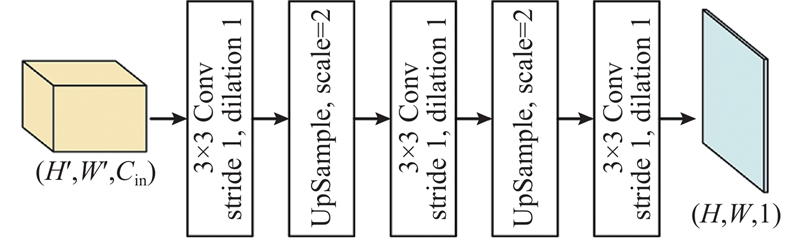
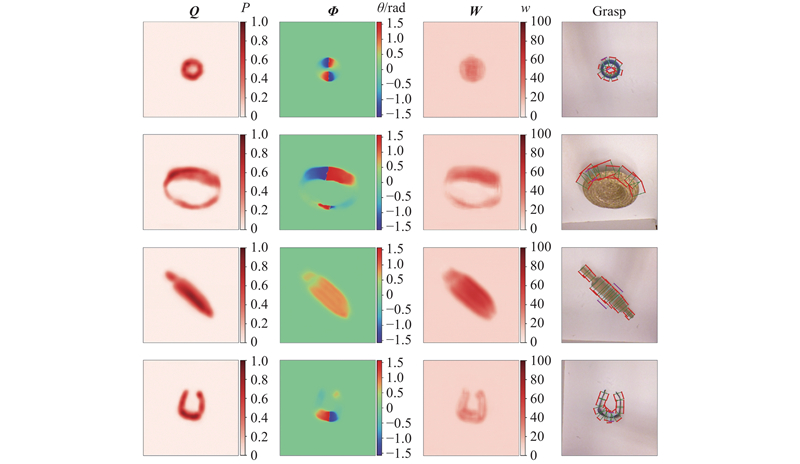
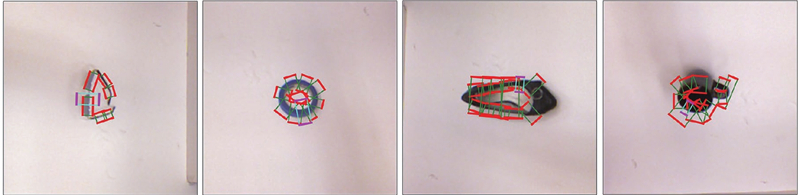
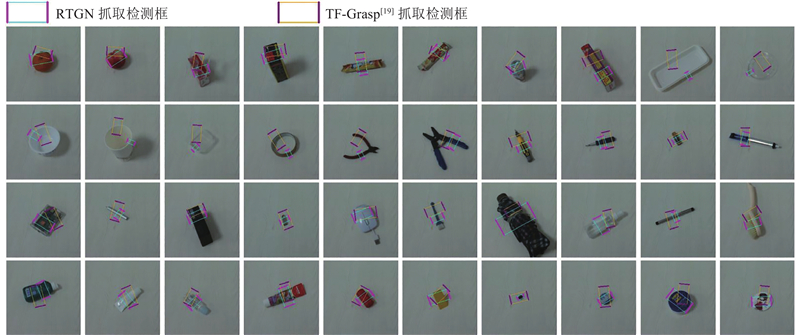
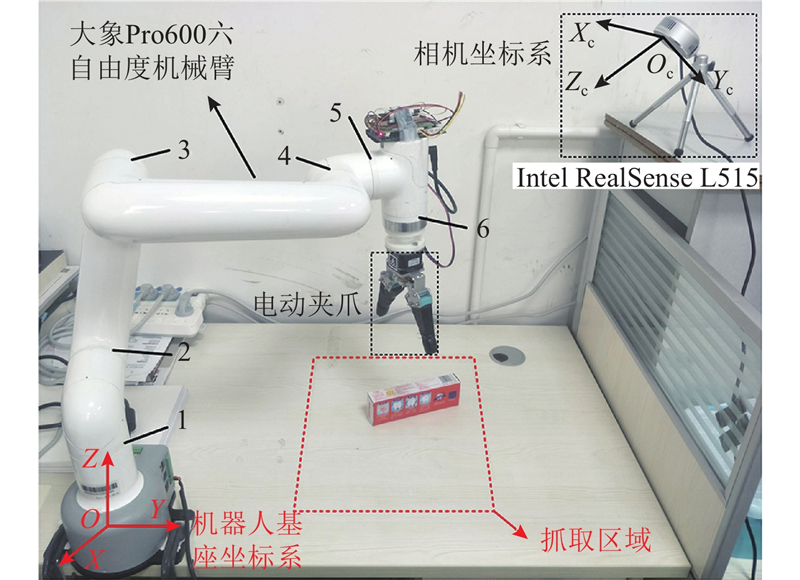
Abstract A light-weight, real-time approach named RTGN (real-time grasp net) was proposed to improve the accuracy and speed of robotic grasp detection for novel objects of diverse shapes, types and sizes. Firstly, a multi-scale dilated convolution module was designed to construct a light-weight feature extraction backbone. Secondly, a mixed attention module was designed to help the network focus more on meaningful features. Finally, the pyramid pool module was deployed to fuse the multi-level features extracted by the network, thereby improving the capability of grasp perception to the object. On the Cornell grasping dataset, RTGN generated grasps at a speed of 142 frame per second and attained accuracy rates of 98.26% and 97.65% on image-wise and object-wise splits, respectively. In real-world robotic grasping experiments, RTGN obtained a success rate of 96.0% in 400 grasping attempts across 20 novel objects. Experimental results demonstrate that RTGN outperforms existing methods in both detection accuracy and detection speed. Furthermore, RTGN shows strong adaptability to variations in the position and pose of grasped objects, effectively generalizing to novel objects of diverse shapes, types and sizes.
|
|
Received: 22 August 2023
Published: 05 March 2024
|
|
|
| Fund: 国家自然科学基金资助项目(12126606);四川省科技计划资助项目(23ZDYF2913);德阳科技(揭榜)资助项目(2021JBJZ007);智能电网四川省重点实验室应急重点资助项目(020IEPG-KL-20YJ01). |
|
Corresponding Authors:
Haiyan TU
E-mail: mingjun_s@foxmail.com;haiyantu@163.com
|
轻量化机器人抓取位姿实时检测算法
针对机器人对形状、大小、种类变化不一的未知物体的抓取,提出轻量化的抓取位姿实时检测算法RTGN,以进一步提升抓取检测准确率及检测速度. 设计多尺度空洞卷积模块,以构建轻量化的特征提取主干网络;设计混合注意力模块,以加强网络对重要抓取特征的关注;引入金字塔池化模块融合多层级特征,以提升网络对物体的抓取感知能力. 在Cornell抓取数据集上进行测试,RTGN检测速度为142帧/s,在图像拆分和对象拆分上的检测准确率分别为98. 26%和97. 65%;在实际抓取环境下进行抓取实验,机器人对20类未知物体进行400次抓取,抓取成功率为96. 0%. 实验结果表明,RTGN的检测准确率和检测速度较现有方法有明显提升,对物体的位置和姿态变化具有较强的适应性,并且能够有效地泛化到形状、大小、种类等变化不一的未知物体的抓取检测中.
关键词:
机器人抓取,
抓取检测,
注意力机制,
卷积神经网络,
深度学习,
非结构化环境
|
|
| [1] |
刘亚欣, 王斯瑶, 姚玉峰, 等 机器人抓取检测技术的研究现状[J]. 控制与决策, 2020, 35 (12): 2817- 2828
LIU Yaxin, WANG Siyao, YAO Yufeng, et al Recent researches on robot autonomous grasp technology[J]. Control and Decision, 2020, 35 (12): 2817- 2828
|
|
|
| [2] |
BOHG J, MORALES A, ASFOUR T, et al Data-driven grasp synthesis: a survey[J]. IEEE Transactions on Robotics, 2014, 30 (2): 289- 309
doi: 10.1109/TRO.2013.2289018
|
|
|
| [3] |
仲训杲, 徐敏, 仲训昱, 等 基于多模特征深度学习的机器人抓取判别方法[J]. 自动化学报, 2016, 42 (7): 1022- 1029
ZHONG Xungao, XU Min, ZHONG Xunyu, et al Multimodal features deep learning for robotic potential grasp recognition[J]. Acta Automatica Sinica, 2016, 42 (7): 1022- 1029
|
|
|
| [4] |
杜学丹, 蔡莹皓, 鲁涛, 等 一种基于深度学习的机械臂抓取方法[J]. 机器人, 2017, 39 (6): 820- 828
DU Xuedan, CAI Yinghao, LU Tao, et al A robotic grasping method based on deep learning[J]. Robot, 2017, 39 (6): 820- 828
|
|
|
| [5] |
JIANG Y, MOSESON S, SAXENA A. Efficient grasping from RGBD images: learning using a new rectangle representation [C]// IEEE International Conference on Robotics and Automation . Shanghai: IEEE, 2011: 3304−3311.
|
|
|
| [6] |
LENZ I, LEE H, SAXENA A Deep learning for detecting robotic grasps[J]. The International Journal of Robotics Research, 2015, 34 (4/5): 705- 724
|
|
|
| [7] |
张云洲, 李奇, 曹赫, 等 基于多层级特征的机械臂单阶段抓取位姿检测[J]. 控制与决策, 2021, 36 (8): 1815- 1824
ZHANG Yunzhou, LI Qi, CAO He, et al Single-stage grasp pose detection of manipulator based on multi-level features[J]. Control and Decision, 2021, 36 (8): 1815- 1824
|
|
|
| [8] |
夏晶, 钱堃, 马旭东, 等 基于级联卷积神经网络的机器人平面抓取位姿快速检测[J]. 机器人, 2018, 40 (6): 794- 802
XIA Jing, QIAN Kun, MA Xudong, et al Fast planar grasp pose detection for robot based on cascaded deep convolutional neural networks[J]. Robot, 2018, 40 (6): 794- 802
|
|
|
| [9] |
喻群超, 尚伟伟, 张驰 基于三级卷积神经网络的物体抓取检测[J]. 机器人, 2018, 40 (5): 762- 768
YU Qunchao, SHANG Weiwei, ZHANG Chi Object grasp detecting based on three-level convolution neural network[J]. Robot, 2018, 40 (5): 762- 768
|
|
|
| [10] |
REDMON J, ANGELOVA A. Real-time grasp detection using convolutional neural networks [C]// IEEE International Conference on Robotics and Automation . Seattle: IEEE, 2015: 1316−1322.
|
|
|
| [11] |
KUMRA S, KANAN C. Robotic grasp detection using deep convolutional neural networks [C]// IEEE/RSJ International Conference on Intelligent Robots and Systems . Vancouver: IEEE, 2017: 769−776.
|
|
|
| [12] |
HE K M, ZHANG X Y, REN S Q, et al. Deep residual learning for image recognition [C]// IEEE Conference on Computer Vision and Pattern Recognition (CVPR) . Las Vegas: IEEE, 2016: 770−778.
|
|
|
| [13] |
GUO D, SUN F C, LIU H P, et al. A hybrid deep architecture for robotic grasp detection [C]// IEEE International Conference on Robotics and Automation . Singapore: IEEE, 2017: 1609−1614.
|
|
|
| [14] |
CHU F J, XU R N, VELA P A Real-world multiobject, multigrasp detection[J]. IEEE Robotics and Automation Letters, 2018, 3 (4): 3355- 3362
doi: 10.1109/LRA.2018.2852777
|
|
|
| [15] |
ZHOU X W, LAN X G, ZHANG H B, et al. Fully convolutional grasp detection network with oriented anchor box [C]// IEEE/RSJ International Conference on Intelligent Robots and Systems . Madrid: IEEE, 2018: 7223−7230.
|
|
|
| [16] |
MORRISON D, CORKE P, LEITNER J. Closing the loop for robotic grasping: a real-time, generative grasp synthesis approach [EB/OL]. (2018−05−15) [2023−02−06]. https://arxiv.org/abs/1804.05172v2.
|
|
|
| [17] |
KUMRA S, JOSHI S, SAHIN F. Antipodal robotic grasping using generative residual convolutional neural network [C]// IEEE/RSJ International Conference on Intelligent Robots and Systems . Las Vegas: IEEE, 2020: 9626−9633.
|
|
|
| [18] |
CHENG H, WANG Y Y, MENG Max Q H. Grasp pose detection from a single RGB image [C]// IEEE/RSJ International Conference on Intelligent Robots and Systems . Prague: IEEE, 2021: 4686−4691.
|
|
|
| [19] |
WANG S C, ZHOU Z L, KAN Z When transformer meets robotic grasping: exploits context for efficient grasp detection[J]. IEEE Robotics and Automation Letters, 2022, 7 (3): 8170- 8177
doi: 10.1109/LRA.2022.3187261
|
|
|
| [20] |
ZHAO H S, SHI J P, QI X J, et al. Pyramid scene parsing network [C]// IEEE Conference on Computer Vision and Pattern Recognition (CVPR) . Honolulu: IEEE, 2017: 6230−6239.
|
|
|
| [21] |
WANG P Q, CHEN P F, YUAN Y, et al. Understanding convolution for semantic segmentation [C]// IEEE Winter Conference on Applications of Computer Vision (WACV) . Lake Tahoe: IEEE, 2018: 1451−1460.
|
|
|
| [22] |
SRIVASTAVA N, HINTON G, KRIZHEVSKY A, et al Dropout: a simple way to prevent neural networks from overfitting[J]. The Journal of Machine Learning Research, 2014, 15 (1): 1929- 1958
|
|
|
| [23] |
WOO S, PARK J, LEE J Y, et al. CBAM: convolutional block attention module [C]// Proceedings of the European Conference on Computer Vision (ECCV) . Munich: Springer, 2018: 3−19.
|
|
|
| [24] |
HOU Q B, ZHOU D Q, FENG J S. Coordinate attention for efficient mobile network design [C]// IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) . Nashville: IEEE, 2021: 13708−13717.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|