|
|
|
| Vehicle trajectory prediction based on temporal-spatial multi-head attention mechanism |
Xiu-lan SONG1( ),Zhao-hang DONG1,Hang-guan SHAN2,Wei-jie LU1 ),Zhao-hang DONG1,Hang-guan SHAN2,Wei-jie LU1 |
1. College of Information Engineering, Zhejiang University of Technology, Hangzhou 310023
2. College of Information and Electronic Engineering, Zhejiang University, Hangzhou 310027 |
|
|
|
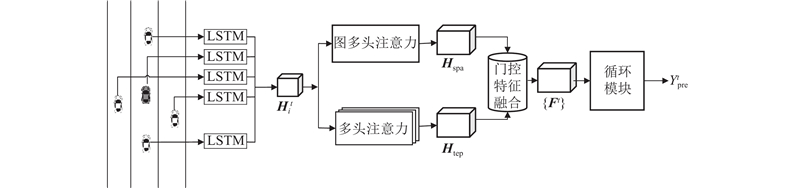
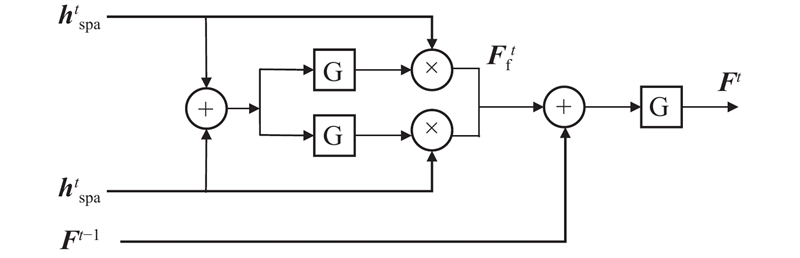
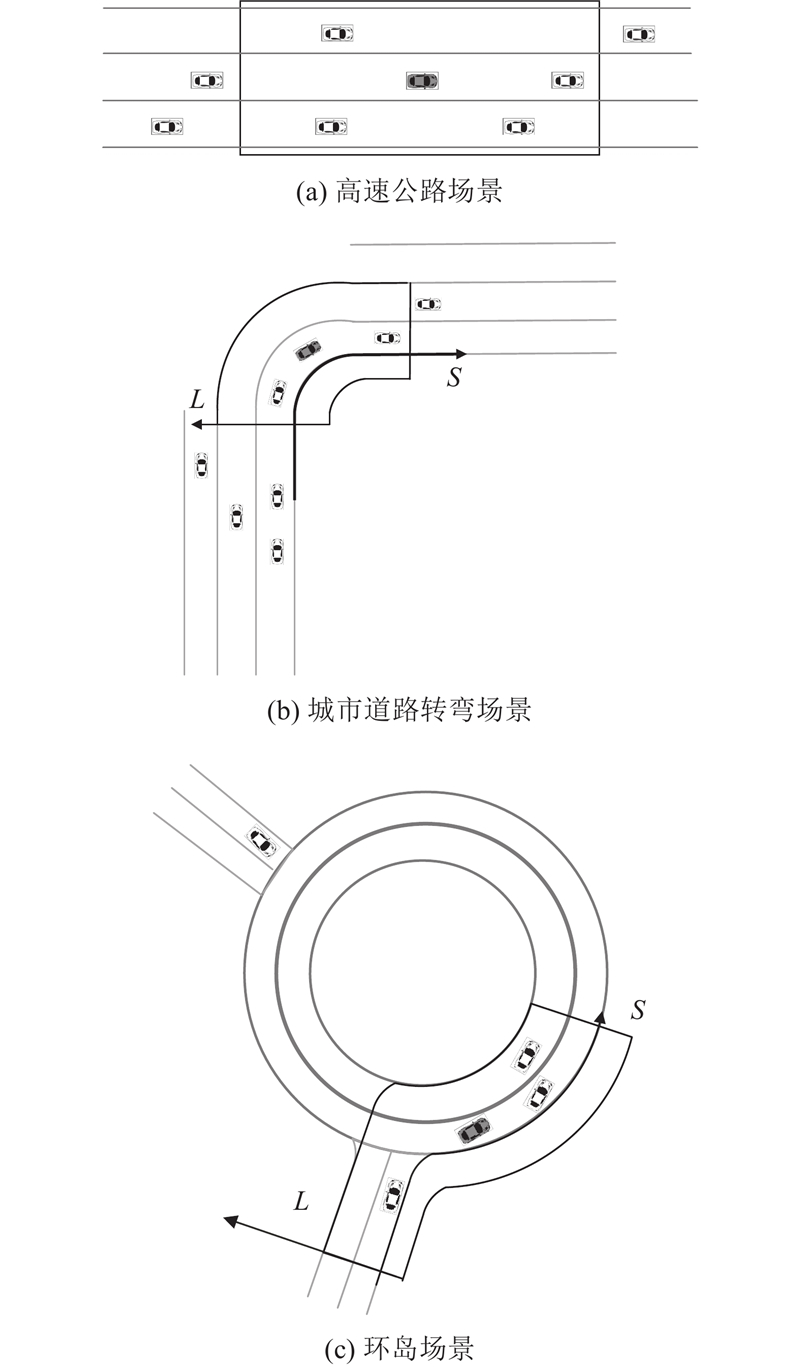
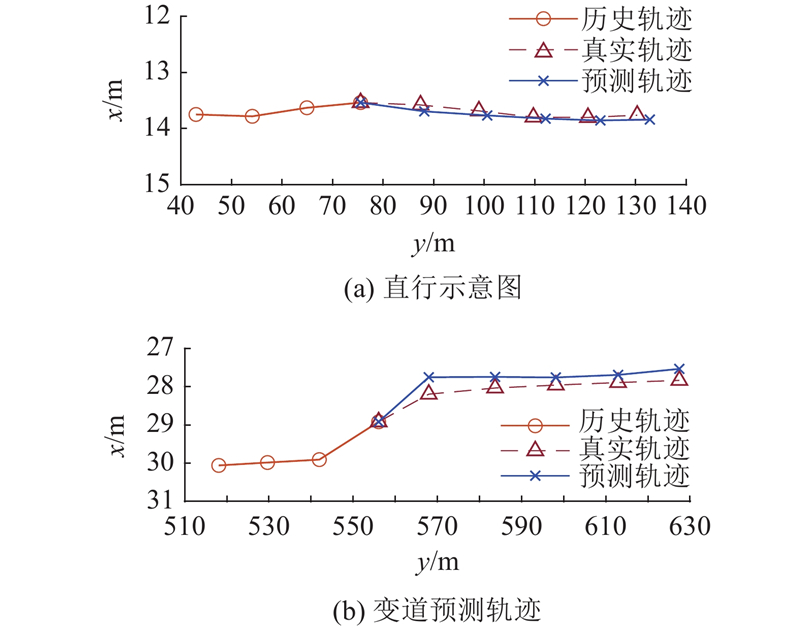
Abstract Aiming at the problem that temporal-spatial features affect the trajectory prediction accuracy of autonomous vehicle, a temporal-spatial multi-head attention (TSMHA) vehicle trajectory prediction model was proposed. For the feature information of spatial and temporal dimensions, the multi-head attention mechanism was used to extract the spatial interaction perception and temporal motion pattern of the vehicle. The processed temporal-spatial feature information was transmitted to the gate fusion model for feature fusion, in order to obtain complementary features and remove redundancy. Using the encoder-decoder structure based on long short-term memory (LSTM), future trajectories were recurrently generated considering the potential interaction between trajectories during encoding and decoding. In the training process, the L2 loss function was used to reduce the difference between the predicted trajectory and the ground-truth trajectory. Experimental results show that, compared with the comparison models, the accuracy of the proposed model was improved by 3.95% in the highway, 15.64% in the urban roads, and 31.40% in the roundabout scenario.
|
|
Received: 11 October 2022
Published: 31 August 2023
|
|
|
| Fund: 国家自然科学基金资助项目(62273307);浙江省公益性技术应用研究资助项目(LGF22F030013);浙江省重点研发计划资助项目(2021C11096) |
基于时空融合的多头注意力车辆轨迹预测
针对时空维度特征影响自动驾驶车辆轨迹精度的问题,提出基于时空融合的多头注意力(TSMHA)车辆轨迹预测模型,对于空间与时间2个维度的特征信息,分别使用多头注意力机制提取车辆空间交互感知与时间运动模式. 为了获得互补特征,并除去特征数据中的冗余,将处理后的时空特征信息传输至门控特征融合模型进行特征融合. 使用基于长短期记忆(LSTM)的编解码器结构,考虑编码与解码2个过程中轨迹之间潜在的相互作用,循环生成目标车辆未来预测轨迹. 在训练过程中使用L2损失函数,以此降低预测轨迹与真实轨迹的差值. 实验表明,与对比算法模型相比,在直线高速公路、城市十字路口、环岛场景下,本研究所提出的模型的精度分别提高了3.95%、 15.64%、31.40%.
关键词:
车辆智能决策,
轨迹预测,
时空融合注意力机制,
多目标车辆,
神经网络
|
|
| [1] |
LI X L, XIA J, CHEN X Y, et al SIT: a spatial interaction-aware transformer-based model for freeway trajectory prediction[J]. ISPRS International Journal of Geo-Information, 2022, 11 (2): 79- 94
doi: 10.3390/ijgi11020079
|
|
|
| [2] |
ELNAGAR A. Prediction of moving objects in dynamic environments using kalman filters [C]// IEEE International Symposium on Computational Intelligence in Robotics and Automation. New York: IEEE, 2001: 414-419.
|
|
|
| [3] |
季学武, 费 聪, 何祥坤, 等 基于 LSTM 网络的驾驶意图识别及车辆轨迹预测[J]. 中国公路学报, 2019, 32 (6): 34- 42
JI Xue-wu, FEI Cong, HE Xiang-kun, et al Intention recognition and trajectory prediction for vehicles using LSTM network[J]. China Journal of Highway and Transport, 2019, 32 (6): 34- 42
|
|
|
| [4] |
韩皓, 谢天 基于注意力 Seq2Seq 网络的高速公路交织区车辆变道轨迹预测[J]. 中国公路学报, 2020, 33 (6): 106- 118
HAN Hao, XIE Tian Lane change trajectory prediction of vehicles in highway interweaving area using Seq2Seq-attention network[J]. China Journal of Highway and Transport, 2020, 33 (6): 106- 118
|
|
|
| [5] |
FEI C, HE X K, JI X Multi-modal vehicle trajectory prediction based on mutual information[J]. IET Intelligent Transport Systems, 2020, 14 (3): 148- 153
doi: 10.1049/iet-its.2019.0299
|
|
|
| [6] |
ALAHI A, GOEL K, RAMANATHAN V, et al. Social LSTM: human trajectory prediction in crowded spaces [C]// IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). New York: IEEE, 2016: 961-971.
|
|
|
| [7] |
XIN L, WANG P, CHAN C, et al. Intention-aware long horizon trajectory prediction of surrounding vehicles using dual LSTM networks [C]// 21st International Conference on Intelligent Transportation Systems. New York: IEEE, 2018: 1441-1446.
|
|
|
| [8] |
HOU L, XIN L, LE S E, et al Interactive trajectory prediction of surrounding road users for autonomous driving using structural-LSTM network[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 21 (11): 4615- 4625
doi: 10.1109/TITS.2019.2942089
|
|
|
| [9] |
KIM B, KANG C M, KIM J, et al. Probabilistic vehicle trajectory prediction over occupancy grid map via recurrent neural network [C]// IEEE 20th International Conference on Intelligent Transportation Systems. New York: IEEE, 2017: 399-404.
|
|
|
| [10] |
WU Y, CHEN G, LI Z, et al HSTA: a hierarchical spatio-temporal attention model for trajectory prediction[J]. IEEE Transactions on Vehicular Technology, 2021, 70 (11): 11295- 11307
doi: 10.1109/TVT.2021.3115018
|
|
|
| [11] |
DEO N, TRIVEDI M M. Convolutional social pooling for vehicle trajectory prediction [C]// IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops. New York: IEEE, 2018: 1468-1476.
|
|
|
| [12] |
MO X Y, XING Y, LV C. Interaction-aware trajectory prediction of connected vehicles using CNN-LSTM networks [C]// 46th Annual Conference of the IEEE-Industrial- Electronics-Society (IECON). New York: IEEE, 2020: 5057-5062.
|
|
|
| [13] |
MUKHERJEE S, WANG S, WEALLACE A. Interacting vehicle trajectory prediction with convolutional recurrent neural networks [C]// IEEE International Conference on Robotics and Automation. New York: IEEE, 2020: 4336-4342.
|
|
|
| [14] |
GUPTA A, JOHNSON J, LI F F, et al. Social GAN: socially acceptable trajectories with generative Adversarial networks [C]// IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). New York: IEEE, 2018: 2255-2264.
|
|
|
| [15] |
MNIH V, HEESS N, GRAVES A, et al. Recurrent models of visual attention [C]// 28th Conference on Neural Information Processing Systems. California: NeurIPS, 2014: 2204-2212.
|
|
|
| [16] |
LIN L, LI W Z, BI H K, et al Vehicle trajectory prediction using LSTMs with spatial-temporal attention mechanisms[J]. IEEE Intelligent Transportation Systems Magazine, 2021, 14 (2): 197- 208
|
|
|
| [17] |
YANG J, SUN X, WANG R G, et al PTPGC: pedestrian trajectory prediction by graph attention network with ConvLSTM[J]. Robotics and Autonomous Systems, 2022, 148: 103931- 103942
doi: 10.1016/j.robot.2021.103931
|
|
|
| [18] |
YAN J, PENG Z F, YIN H L, et al Trajectory prediction for intelligent vehicles using spatial-attention mechanism[J]. IET Intelligent Transport Systems, 2020, 14 (13): 1855- 1863
doi: 10.1049/iet-its.2020.0274
|
|
|
| [19] |
CHEN X B, ZHANG H J, ZHAO F, et al Intention-aware vehicle trajectory prediction based on spatial-temporal dynamic attention network for internet of vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23 (10): 19471- 19483
doi: 10.1109/TITS.2022.3170551
|
|
|
| [20] |
MOHAMED A, QIAN K, ELHOSEINY M, et al. Social-STGCNN: a social spatio-temporal graph convolutional neural network for human trajectory prediction [C]// IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops. New York: IEEE, 2020: 14412-14420.
|
|
|
| [21] |
YAN S, XIONG Y, LIN D. Spatial temporal graph convolutional networks for skeleton-based action recognition [C]// AAAI Conference on Artificial Intelligence. California: AAAI, 2018, 32(1): 7444-7452.
|
|
|
| [22] |
XUE H, HUYNH D Q, REYNOLDS M A location-velocity-temporal attention LSTM model for pedestrian trajectory prediction[J]. IEEE ACCESS, 2020, 8: 44576- 44589
doi: 10.1109/ACCESS.2020.2977747
|
|
|
| [23] |
MESSAOUD K, YAHIAOUI I, VERROUST-BLONDET A, et al Attention based vehicle trajectory prediction[J]. IEEE Transactions on Intelligent Vehicles, 2021, 6 (1): 175- 185
doi: 10.1109/TIV.2020.2991952
|
|
|
| [24] |
VASWANI A, SHAZEER N, PARMAR N, et al. Attention is all you need [C]// 31st Conference on Neural Information Processing Systems. California: NeurIPS, 2017: 5998-6008.
|
|
|
| [25] |
ZHAO T, XU Y, MONFORT M, et al. Multi-agent tensor fusion for contextual trajectory prediction [C]// IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). New York: IEEE, 2019: 12118-12126.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|