|
|
|
| Optimal velocity planning for mobile robot based on simultaneous dynamic optimization |
Zhiwei FAN1,2,3( ),Kai JIA1,2,4,*(),Lei ZHANG1,2,4,Fengshan ZOU1,2,4,Zhenjun DU4,Mingmin LIU4 ),Kai JIA1,2,4,*(),Lei ZHANG1,2,4,Fengshan ZOU1,2,4,Zhenjun DU4,Mingmin LIU4 |
1. State Key Laboratory of Robotics, Shenyang Institute of Automation, Chinese Academy of Sciences, Shenyang 110016, China
2. Institutes for Robotics and Intelligent Manufacturing, Chinese Academy of Sciences, Shenyang 110016, China
3. University of Chinese Academy of Sciences, Beijing 100049, China
4. Shenyang SIASUN Robot and Automation Limited Company, Shenyang 110168, China |
|
|
|
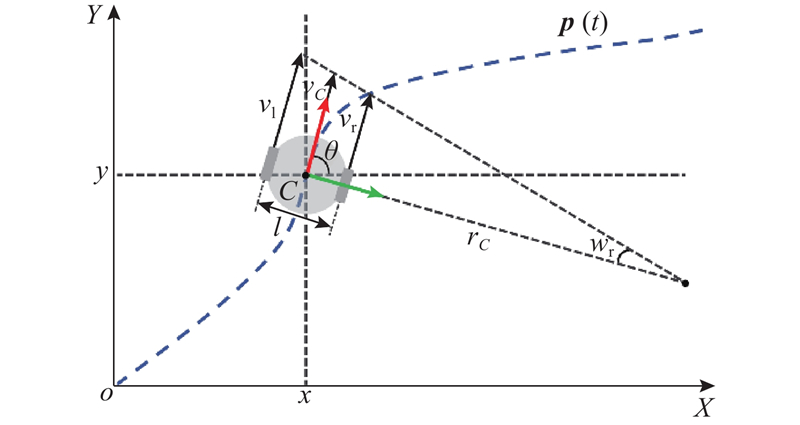
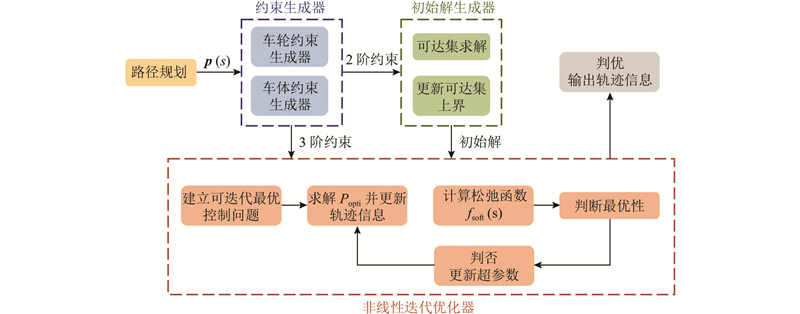
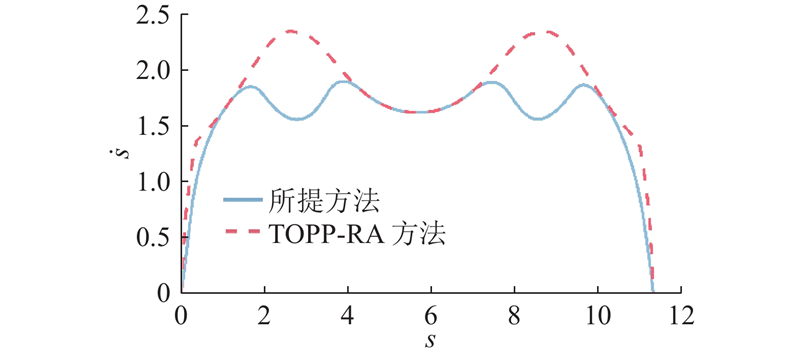
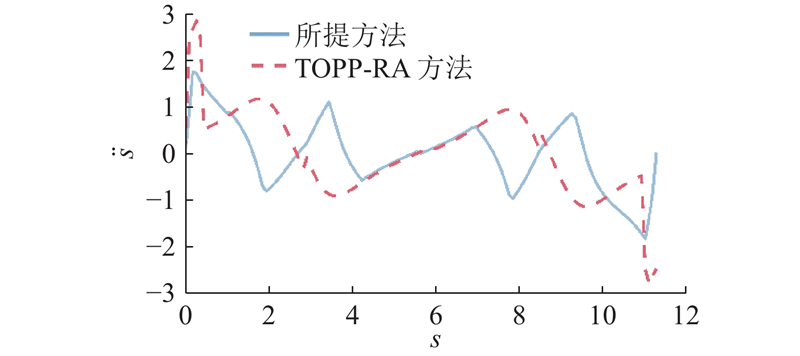
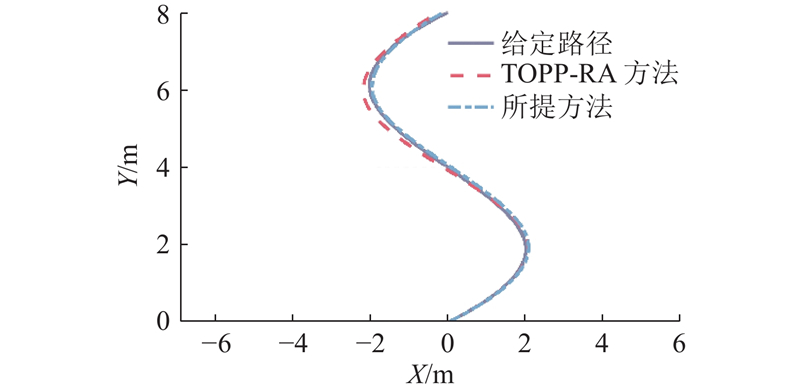
Abstract A velocity planning method based on synchronous dynamic optimization was proposed in order to address the issue where the actual motion of mobile robots was constrained by motion limits and nonholonomic constraints, making it difficult to balance motion efficiency and actuator tracking performance. A speed planning scheme based on optimal control was established, considering the physical constraints of the wheels and vehicle body rules of the mobile robot. The extraction of the first and second-order constraints from the constraint generator, along with the derivation of a reference trajectory via linear programming, was facilitated, providing initial estimates for numerical optimization. A constraint relaxation method was used with the incorporation of third-order constraints from the constraint generator in order to obtain the optimal speed scheme through synchronous iterative optimization based on the interior-point method. The proposed algorithms were validated through numerical and simulation experiments. The experimental results demonstrate that the physical limits of the robot’s wheels or the limit of its body rule can be reached in terms of motion efficiency. A reduction of over 20% in path position error concerning actuator tracking performance was achieved, which ensured a smooth and efficient motion process.
|
|
Received: 03 July 2023
Published: 23 July 2024
|
|
|
| Fund: 国家自然科学基金-区域创新发展联合基金资助项目(U20A20197). |
|
Corresponding Authors:
Kai JIA
E-mail: fanzhiwei@sia.cn;jiakai@siasun.com
|
基于同步动态优化的移动机器人最优速度规划
针对移动机器人在实际运动中受到运动极限的制约及非完整约束的影响,导致难以兼顾运动效率与执行器跟踪性能的问题,提出基于同步动态优化的速度规划方法. 建立基于最优控制的速度规划方案,综合考虑机器人的车轮物理约束及车体规则约束. 提取约束生成器中的1、2阶约束,根据可达性分析,通过线性规划过程,递推得到参考轨迹,为数值优化提供初始猜测. 考虑约束生成器中的3阶约束,采用约束松弛方法,通过基于内点法的同步迭代优化,得到最优配速方案. 通过数值及仿真实验验证了以上算法,实验结果表明,移动机器人在运动效率上可以达到车轮物理极限或车体规则极限,在执行器跟踪性能上可以将路径位置误差减小20%以上,保证了运动过程平稳光滑.
关键词:
移动机器人,
速度规划,
加加速度约束,
同步动态优化,
可达性分析
|
|
| [1] |
KIM T, LIM S, SHIN G, et al An open-source low-cost mobile robot system with an RGB-D camera and efficient real-time navigation algorithm[J]. IEEE Access, 2022, 10: 127871- 127881
doi: 10.1109/ACCESS.2022.3226784
|
|
|
| [2] |
GRAF F, LINDERMAYR J, ODABASI C, et al Toward holistic scene understanding: a transfer of human scene perception to mobile robots[J]. IEEE Robotics and Automation Magazine, 2022, 29 (4): 36- 49
doi: 10.1109/MRA.2022.3210587
|
|
|
| [3] |
MORALES L, HERRERA M, CAMACHO O, et al LAMDA control approaches applied to trajectory tracking for mobile robots[J]. IEEE Access, 2021, 9: 37179- 37195
doi: 10.1109/ACCESS.2021.3062202
|
|
|
| [4] |
CHRISTOPHER M, BIRGIT G, KAI P. World robotics 2022: service robots [EB/OL]. (2022-10-26)[2023-06-25]. https://www.roboticstomorrow.com/story/2022/10/sales-of-robots-for-the-service-sector-grew-by-37-worldwide/19664/.
|
|
|
| [5] |
PHAM H, PHAM Q C A new approach to time-optimal path parameterization based on reachability analysis[J]. IEEE Transactions on Robotics, 2017, 34 (3): 645- 659
|
|
|
| [6] |
LI B, OUYANG Y, LI L, et al Autonomous driving on curvy roads without reliance on Frenet frame: a Cartesian-based trajectory planning method[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23 (9): 15729- 15741
doi: 10.1109/TITS.2022.3145389
|
|
|
| [7] |
HOANG V B, NGUYEN V H, NGO T D, et al Socially aware robot navigation framework: where and how to approach people in dynamic social environments[J]. IEEE Transactions on Automation Science and Engineering, 2022, 20 (2): 1322- 1336
|
|
|
| [8] |
LIN Z, TAGUCHI R. Improved dynamic window approach using the jerk model [C]// 22nd International Conference on Control, Automation and Systems . Busan: IEEE, 2022: 1193–1198.
|
|
|
| [9] |
RAINERI M, BIANCO C G L. Jerk limited planner for real-time applications requiring variable velocity bounds [C]// IEEE 15th International Conference on Automation Science and Engineering . Vancouver: IEEE, 2019: 1611–1617.
|
|
|
| [10] |
KIM J Trajectory generation of a two-wheeled mobile robot in an uncertain environment[J]. IEEE Transactions on Industrial Electronics, 2019, 67 (7): 5586- 5594
|
|
|
| [11] |
王德军, 张凯然, 徐鹏, 等 基于车辆执行驱动能力的复杂路况速度规划及控制[J]. 吉林大学学报: 工学版, 2023, 53 (3): 643- 652
WANG Dejun, ZHANG Kairan, XU Peng, et al Speed planning and control under complex road conditions based on vehicle executive capability[J]. Journal of Jilin University: Engineering and Technology Edition, 2023, 53 (3): 643- 652
|
|
|
| [12] |
SHIMIZU Y, HORIBE T, WATANABE F, et al. Jerk constrained velocity planning for an autonomous vehicle: linear programming approach [C]// International Conference on Robotics and Automation . Philadelphia: IEEE, 2022: 5814–5820.
|
|
|
| [13] |
ZHOU J, HE R, WANG Y, et al Autonomous driving trajectory optimization with dual-loop iterative anchoring path smoothing and piecewise-jerk speed optimization[J]. IEEE Robotics and Automation Letters, 2020, 6 (2): 439- 446
|
|
|
| [14] |
ZDESAR A, SKRJANC I Optimum velocity profile of multiple Bernstein-Bézier curves subject to constraints for mobile robots[J]. ACM Transactions on Intelligent Systems and Technology, 2018, 9 (5): 1- 23
|
|
|
| [15] |
ZHANG B, HE J, PEI D. Global trajectory optimization of mobile robot based on Minimum Snap [C]// IEEE 6th Information Technology and Mechatronics Engineering Conference . Chongqing: IEEE, 2022: 36–41.
|
|
|
| [16] |
陈峥, 张玉果, 沈世全, 等 城市郊区道路跟车条件下智能网联汽车速度规划[J]. 中国公路学报, 2023, 36 (6): 298- 310
CHEN Zheng, ZHANG Yuguo, SHEN Shiquan, et al Speed planning of intelligent and connected vehicle under following conditions of suburban road scenarios[J]. China Journal of Highway and Transport, 2023, 36 (6): 298- 310
|
|
|
| [17] |
BIEGLER L T An overview of simultaneous strategies for dynamic optimization[J]. Chemical Engineering and Processing: Process Intensification, 2007, 46 (11): 1043- 1053
doi: 10.1016/j.cep.2006.06.021
|
|
|
| [18] |
LI B, SHAO Z Simultaneous dynamic optimization: a trajectory planning method for nonholonomic car-like robots[J]. Advances in Engineering Software, 2015, 87: 30- 42
doi: 10.1016/j.advengsoft.2015.04.011
|
|
|
| [19] |
LI B, SHAO Z A unified motion planning method for parking an autonomous vehicle in the presence of irregularly placed obstacles[J]. Knowledge-Based Systems, 2015, 86: 11- 20
doi: 10.1016/j.knosys.2015.04.016
|
|
|
| [20] |
ANDERSSON J A E, GILLIS J, HORN G, et al CasADi: a software framework for nonlinear optimization and optimal control[J]. Mathematical Programming Computation, 2019, 11: 1- 36
doi: 10.1007/s12532-018-0139-4
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|