|
|
|
| Impedance control technology of assembly robot based on active disturbance rejection |
Shi-yu ZHANG( ),Dong-sheng CHEN*(),Ying-hui SONG ),Dong-sheng CHEN*(),Ying-hui SONG |
| Institute of Mechanical Manufacturing Technology, China Academy of Engineering and Physics, Mianyang 621900, China |
|
|
|
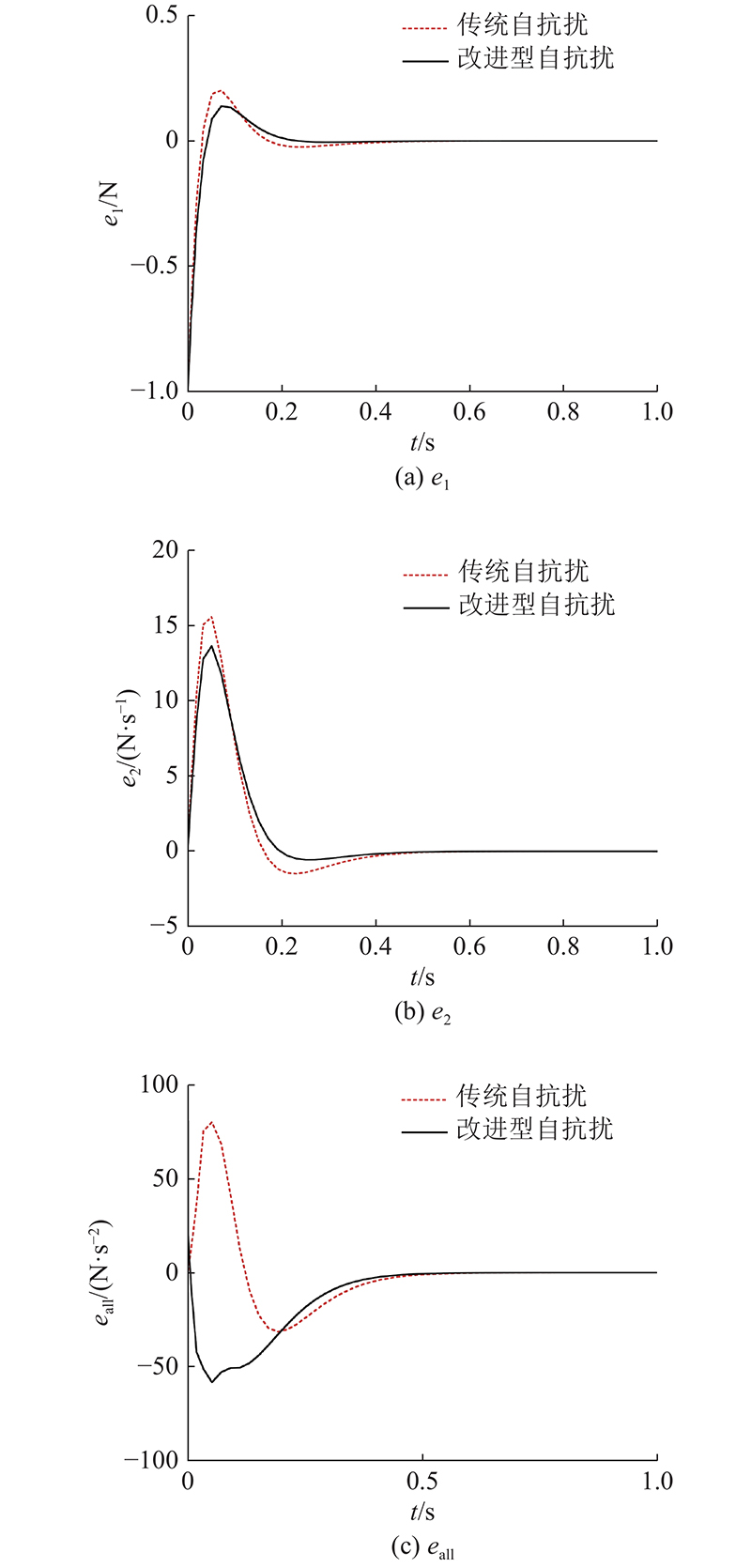
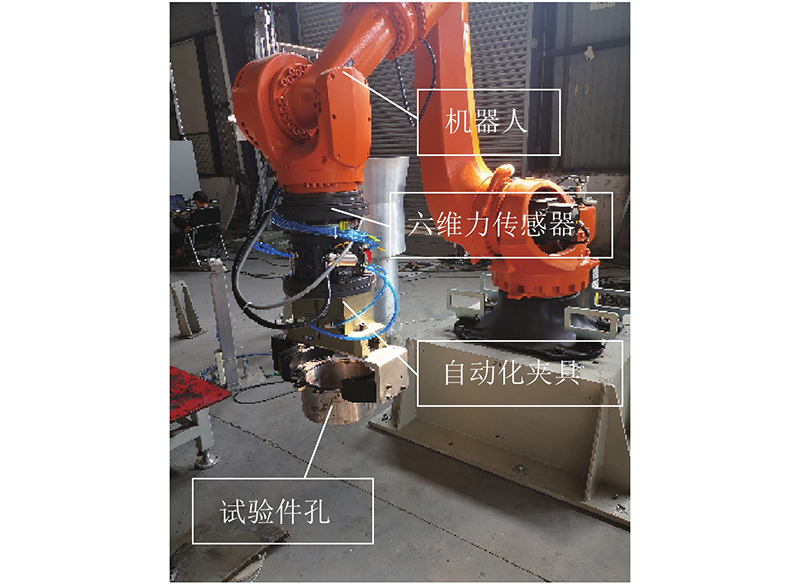
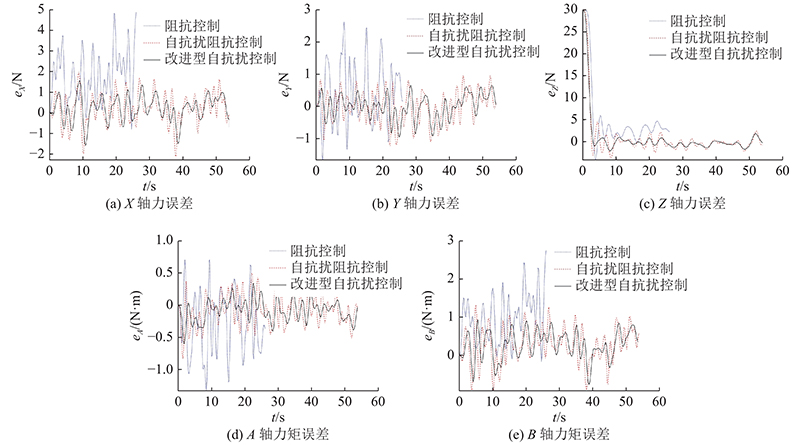
Abstract An improved active disturbance rejection impedance control strategy was proposed, in order to improve the accuracy and flexibility of robot assembly operations. In this strategy, the new expected force was generated by the active disturbance rejection controller to adjust the position of the robot's end tool coordinate system, and achieve the accurate force tracking. The environmental information was observed by the disturbance observer and the expected force of the control system was compensated to improve the adaptability of the control system to environmental parameters. The impedance model was introduced to improve the disturbance observer, which increased the response speed of the observer and improved the precision of force tracking. The experimental results of precision peg-in-hole assembly based on 6-DOF robot showed that the impedance control based on active disturbance rejection control (ADRC) could complete the assembly with less contact force error to traditional impedance control, and the force average error of the impedance control based on improved ADRC was reduced by 12.0% to 28.2% compared with that before the improvement.
|
|
Received: 06 September 2021
Published: 28 September 2022
|
|
|
|
Corresponding Authors:
Dong-sheng CHEN
E-mail: 13980692301@163.com;13518311304@163.com
|
基于自抗干扰的装配机器人阻抗控制技术
为了提升机器人装配作业的精确性和柔顺性,提出改进型自抗扰阻抗控制策略. 该策略通过自抗扰控制器生成新期望力来调整机器人末端工具坐标系的位置,实现精确的力跟踪. 通过扰动观测器观测环境信息并补偿控制系统的期望力,提高控制系统对环境参数的适应性. 引入阻抗模型改进扰动观测器,使观测器的响应速度增大,力跟踪的精度提高. 基于六自由度机器人的精密轴孔装配实验结果表明,与传统阻抗控制相比,基于自抗扰控制(ADRC)的阻抗控制能够在较小的接触力误差下完成装配,且基于改进型自抗扰控制的阻抗控制的力平均误差比改进前自抗扰控制减小12.0%~28.2%.
关键词:
轴孔装配,
柔顺装配,
阻抗控制,
自抗扰控制(ADRC),
机器人
|
|
| [1] |
孟明辉, 周传德, 陈礼彬, 等 工业机器人的研发及应用综述[J]. 上海交通大学学报, 2016, 50 (Suppl.1): 98- 101
MENG Ming-hui, ZHOU Chuan-de, CHEN Li-bin, et al A review of the research and development of industrial robots[J]. Journal of Shanghai Jiao Tong University, 2016, 50 (Suppl.1): 98- 101
doi: 10.16183/j.cnki.jsjtu.2016.S.025
|
|
|
| [2] |
CHERNYAKHOVSKAYA L B, SIMAKOV D A Peg-on-hole: mathematical investigation of motion of a peg and of forces of its interaction with a vertically fixed hole during their alignment with a three-point contact[J]. The International Journal of Advanced Manufacturing Technology, 2020, 170: 689- 704
|
|
|
| [3] |
吴炳龙, 曲道奎, 徐方 基于力/位混合控制的工业机器人精密轴孔装配[J]. 浙江大学学报:工学版, 2018, 52 (2): 379- 386
WU Bing-long, QU Dao-kui, XU Fang Industrial robot high precision peg-in-hole assembly based on hybrid force/position control[J]. Journal of Zhejiang University: Engineering Science, 2018, 52 (2): 379- 386
|
|
|
| [4] |
PARK H, PARK J, LEE D H, et al Compliant peg-in-hole assembly using partial spiral force trajectory with tilted peg posture[J]. IEEE Robotics and Automation Letters, 2020, 5 (3): 4447- 4454
doi: 10.1109/LRA.2020.3000428
|
|
|
| [5] |
HOGAN N . Impedance control: an approach to manipulation [C]// 1984 American Control Conference. San Diego: IEEE, 1984: 304-313.
|
|
|
| [6] |
张光辉, 王耀南 末端 F/T传感器的重力环境下大范围柔顺控制方法[J]. 智能系统学报, 2015, 10 (5): 675- 683
ZHANG Guang-hui, WANG Yao-nan A wide range compliance control method in gravity environment based on end force/ torque sensor[J]. CAAI Transactions on Intelligent Systems, 2015, 10 (5): 675- 683
|
|
|
| [7] |
DUAN J, GAN Y, CHEN M, et al Adaptive variable impedance control for dynamic contact force tracking in uncertain environment[J]. Robotics and Autonomous Systems, 2018, 102: 54- 65
doi: 10.1016/j.robot.2018.01.009
|
|
|
| [8] |
IZADBAKHSH A, KHORASHADIZADEH S Robust impedance control of robot manipulators using differential equations as universal approximator[J]. International Journal of Control, 2018, 91 (10): 2170- 2186
doi: 10.1080/00207179.2017.1336669
|
|
|
| [9] |
LI X, LIU Y H, YU H Iterative learning impedance control for rehabilitation robots driven by series elastic actuators[J]. Automatica, 2018, 90: 1- 7
doi: 10.1016/j.automatica.2017.12.031
|
|
|
| [10] |
ABU-DAKKA F J, LEONEL R, CALDWELL D G Force-based variable impedance learning for robotic manipulation[J]. Robotics and Autonomous Systems, 2018, 109: 156- 167
doi: 10.1016/j.robot.2018.07.008
|
|
|
| [11] |
ZHAO X, ZHAO H, CHEN P, et al Model accelerated reinforcement learning for high precision robotic assembly[J]. International Journal of Intelligent Robotics and Applications, 2020, 4: 202- 216
doi: 10.1007/s41315-020-00138-z
|
|
|
| [12] |
YE Y, CHEN C Y, LI P, et al. Cartesian admittance control with on-line gravity and friction observer compensation for elastic joint robots [C]// 2016 IEEE International Conference on Robotics and Biomimetics. Qingdao: IEEE, 2016: 725-730.
|
|
|
| [13] |
董悫, 张立建, 易旺民, 等 基于动力学前馈的空间机器人多销孔装配力柔顺控制[J]. 机械工程学报, 2019, 55 (4): 207- 217
DONG Que, ZHANG Li-jian, YI Wang-min, et al Force compliance control of multi-peg-in-hole assembling by space robot based on dynamic feedforward[J]. Journal of Mechanical Engineering, 2019, 55 (4): 207- 217
doi: 10.3901/JME.2019.04.207
|
|
|
| [14] |
潘立, 鲍官军, 胥芳, 等 六自由度装配机器人的动态柔顺性控制[J]. 浙江大学学报:工学版, 2018, 52 (1): 125- 132
PAN Li, BAO Guan-jun, XU Fang, et al Dynamic compliant control of six DOF assembly robot[J]. Journal of Zhejiang University: Engineering Science, 2018, 52 (1): 125- 132
|
|
|
| [15] |
LI Z, HUANG Z, HE W, et al Adaptive impedance control for an upper limb robotic exoskeleton using biological signals[J]. IEEE Transactions on Industrial Electronics, 2016, 64 (2): 1664- 1674
|
|
|
| [16] |
高志强 自抗扰控制思想探究[J]. 控制理论与应用, 2013, 12 (30): 1499- 1510
GAO Zhi-qiang On the foundation of active disturbance rejection control[J]. Control Theory and Applications, 2013, 12 (30): 1499- 1510
doi: 10.7641/CTA.2013.31087
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|