|
|
|
| Joint decision-making of balancing and sequencing for type-II robotic mixed-model assembly line |
Bao-feng SUN1( ),Xin-kang ZHANG1,Gen-dao LI2,*(),Jiao-jiao LIU1 ),Xin-kang ZHANG1,Gen-dao LI2,*(),Jiao-jiao LIU1 |
1. College of Transportation, Jilin University, Changchun 130022, China
2. School of Economics and Management, Changchun University of Science and Technology, Changchun 130012, China |
|
|
|
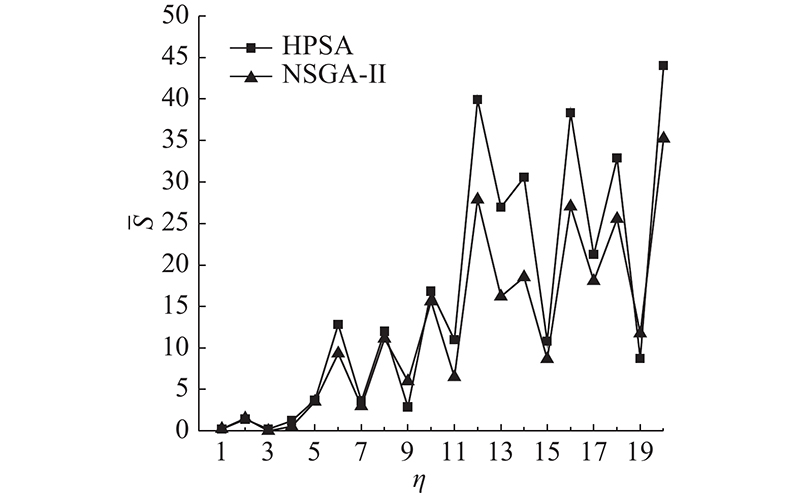
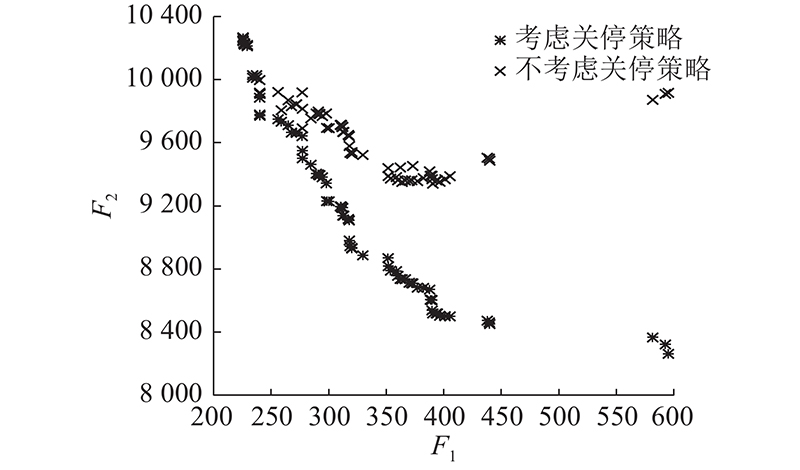
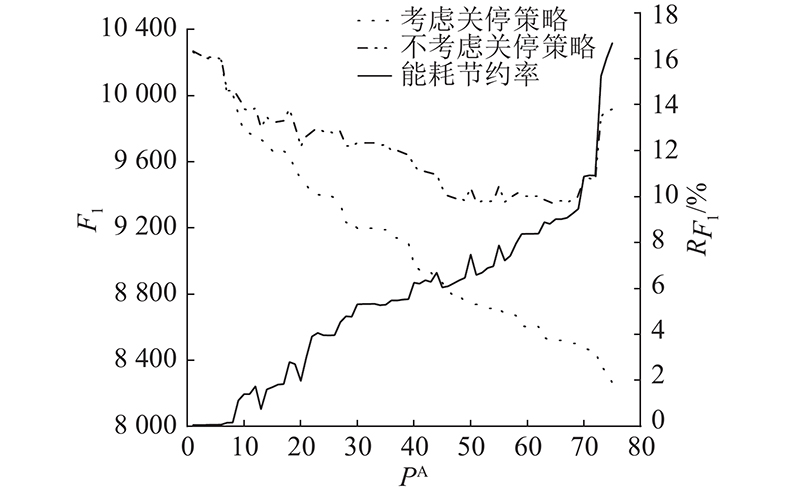
Abstract In order to optimize the energy and efficiency of the type-II robotic mixed-model assembly line system, firstly, five working states of industrial robots was defined to measure the robot energy consumption in state. A dual-objective optimization model of joint decision-making of balancing and sequencing was proposed in consideration of shutdown strategies and product switching. Its objectives were taken as minimizing the maximum working time and energy consumption. Next, the improved non-dominated sorting genetic algorithm II (NSGA-II) was designed and its validation was also verified by comparing with a similarly algorithm. Finally, the technical impact of shutdown strategy and product switching on the robotic mixed-model assembly line system was shown by example analysis. The shutdown strategy was able to bring energy savings to a certain extent, and the benefits become more obvious when the balance of the assembly line decreases, and the maximum energy saving rate reached 16.68%; the product switching in consideration was beneficial both to the operation efficiency and energy efficiency for the robotic mixed-model assembly line.
|
|
Received: 12 September 2021
Published: 30 June 2022
|
|
|
| Fund: 国家自然科学基金资助项目(61873109);吉林省自然科学基金资助项目(20210101055JC);一汽股份技术创新资助项目(KF2020-20006) |
|
Corresponding Authors:
Gen-dao LI
E-mail: sunbf@jlu.edu.cn;gendaoli@cust.edu.cn
|
第II类机器人混流装配线的平衡与排序联合决策
为了提高第II类机器人混流装配线系统能效,界定工业机器人5种工作状态,量化不同状态下的机器人能源消耗值,引入关停策略和考虑产品切换,以最小化最大工作时间和能源消耗为目标,构建平衡与排序联合决策双目标优化模型. 设计改进的非支配排序遗传算法II,通过同类算法对比分析,验证改进算法的有效性. 结合算例,揭示关停策略和产品切换准备作业对机器人混流装配线系统的技术影响。关停策略能够减少能耗,在装配线平衡性下降时的效果愈加明显,最大能耗节约率达到16.68%;考虑产品切换准备作业的影响,有利于机器人混流装配线作业效率和能源消耗的整体优化.
关键词:
机器人混流装配线系统,
能源消耗,
关停策略,
产品切换,
平衡与排序优化,
改进的分支配排序遗传算法II
|
|
| [1] |
LEVITIN G, RUBINOVITZ J, SHNITS B A genetic algorithm for robotic assembly line balancing[J]. European Journal of Operational Research, 2006, 168 (3): 811- 825
doi: 10.1016/j.ejor.2004.07.030
|
|
|
| [2] |
ABD K K, ABHARY K, MARIAN R M. Development of an intelligent approach to dynamic scheduling in robotic flexible assembly cells [M]// NUNES E, TELHADA J, CARVALHO M. IAENG transactions on engineering sciences. [S.l.]: CRC Press, 2014: 203-214.
|
|
|
| [3] |
International Federation of Robotics. World robotics 2020 report [R/OL]. (2020-09-24) [2021-09-12]. https://ifr.org/ifr-press-releases/news/record-2.7-million-robots-work-in-factories-around-the-globe.
|
|
|
| [4] |
LI Z X, TANG Q H, ZHANG L P Minimizing energy consumption and cycle time in two-sided robotic assembly line systems using restarted simulated annealing algorithm[J]. Journal of Cleaner Production, 2016, 135: 508- 522
doi: 10.1016/j.jclepro.2016.06.131
|
|
|
| [5] |
RUBINOVITZ J, BUKCHIN J. Design and balancing of robotic assembly lines [C]// Proceedings of the fourth world conference on robotics research. Pittsburgh: [s. n.], 1991: 1-10.
|
|
|
| [6] |
GAO J, SUN L Y, WANG L H, et al An efficient approach for type II robotic assembly line balancing problems[J]. Computers and industrial engineering, 2009, 56 (3): 1065- 1080
doi: 10.1016/j.cie.2008.09.027
|
|
|
| [7] |
YOOSEFELAHI A, AMINNAYERI M, MOSADEGH H, et al Type II robotic assembly line balancing problem: an evolution strategies algorithm[J]. Journal of Manufacturing Systems, 2012, 31 (2): 139- 151
doi: 10.1016/j.jmsy.2011.10.002
|
|
|
| [8] |
CIL Z A, METE S, AGPAK K Analysis of the type II robotic mixed-model assembly line balancing problem[J]. Engineering Optimization, 2017, 49 (6): 990- 1009
doi: 10.1080/0305215X.2016.1230208
|
|
|
| [9] |
RABBANI M, MOUSAVI Z, FARROKHI-ASL H Multi-objective metaheuristics for solving a type II robotic mixed-model assembly line balancing problem[J]. Journal of Industrial and Production Engineering, 2016, 33 (7): 472- 484
doi: 10.1080/21681015.2015.1126656
|
|
|
| [10] |
ZHANG Z K, TANG Q H, LI Z X, et al Modelling and optimization of energy-efficient U-shaped robotic assembly line balancing problems[J]. International Journal of Production Research, 2019, 57 (7): 5520- 5537
|
|
|
| [11] |
ZHANG Z K, TANG Q H, ZHANG L P Mathematical model and grey wolf optimization for low-carbon and low-noise U-shaped robotic assembly line balancing problem[J]. Journal of Cleaner Production, 2019, 215: 744- 756
doi: 10.1016/j.jclepro.2019.01.030
|
|
|
| [12] |
ZHANG B K, XU L Y, ZHANG J Balancing and sequencing problem of mixed-model U-shaped robotic assembly line: mathematical model and dragonfly algorithm based approach[J]. Applied Soft Computing, 2021, 98: 106739
doi: 10.1016/j.asoc.2020.106739
|
|
|
| [13] |
NILAKANTAN J M, LI Z X, TANG Q H, et al Multi-objective cooperative co-evolutionary algorithm for minimizing carbon footprint and maximizing line efficiency in robotic assembly line systems[J]. Journal of Cleaner Production, 2017, 156: 124- 136
doi: 10.1016/j.jclepro.2017.04.032
|
|
|
| [14] |
周炳海, 康雪云 考虑能效的多机器人协同装配线平衡方法[J]. 北京理工大学学报, 2019, 39 (3): 276- 282
ZHOU Bing-hai, KANG Xue-yun Multi-robot cooperative assembly line balancing method based on energy efficiency[J]. Transactions of Beijing Institute of Technology, 2019, 39 (3): 276- 282
|
|
|
| [15] |
NILAKANTAN J M, HUANG G Q, PONNAMBALAM S G An investigation on minimizing cycle time and total energy consumption in robotic assembly line systems[J]. Journal of Cleaner Product, 2015, 90: 311- 325
doi: 10.1016/j.jclepro.2014.11.041
|
|
|
| [16] |
ZHANG B K, XU L Y, ZHANG J A multi-objective cellular genetic algorithm for energy-oriented balancing and sequencing problem of mixed-model assembly line[J]. Journal of Cleaner Production, 2020, 244: 118845
doi: 10.1016/j.jclepro.2019.118845
|
|
|
| [17] |
MOUZON G, YILDIRIM M B A framework to minimize total energy consumption and total tardiness on a single machine[J]. International Journal of Sustainable Engineering, 2008, 1 (2): 105- 116
doi: 10.1080/19397030802257236
|
|
|
| [18] |
谢素芬 基于PROFINET的节能技术PROFIenergy——节能技术新趋势[J]. 仪器仪表标准化与计量, 2010, (6): 36- 39
XIE Su-fen Energy-saving technology PROFIenergy based on PROFINET new trend of energy-saving technology[J]. Instrumentation Standardization and Metrology, 2010, (6): 36- 39
doi: 10.3969/j.issn.1672-5611.2010.06.011
|
|
|
| [19] |
SCHOLL A. Balancing and Sequencing of Assembly Lines [M]. Heidelberg: Springer-Verlag, 1999.
|
|
|
| [20] |
LI Z X, JANARDHANAN M N, TANG Q H, et al Mathematical model and metaheuristics for simultaneous balancing and sequencing of a robotic mixed-model assembly line[J]. Engineering Optimization, 2018, 50 (5): 877- 893
doi: 10.1080/0305215X.2017.1351963
|
|
|
| [21] |
RUBINOVITZ J, LEVITIN G Genetic algorithm for assembly line balancing[J]. International Journal of Production Economics, 1995, 41 (1/3): 343- 354
|
|
|
| [22] |
DAVIS L. Applying adaptive algorithms to epistatic domains [EB/OL]. [2021-09-12]. https://www.ijcai.org/Proceedings/85-1/Papers/029.pdf.
|
|
|
| [23] |
KIM Y K, KIM S J, KIM J Y. Mixed model line balancing and scheduling [DS/OL]. [2021-09-12]. https://assembly-line-balancing.de/further-data-sets/mixed-model-line-balancing-and-scheuduling/
|
|
|
| [24] |
MONTGOMERY D C. Design and analysis of experiments [M]. 9th ed. New York: Wiley, 2017.
|
|
|
| [25] |
ZITZLER E, THIELE L Multiobjective evolutionary algorithms: a comparative case study and the strength Pareto approach[J]. IEEE Transactions on Evolutionary Computation, 1999, 3 (4): 257- 271
doi: 10.1109/4235.797969
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|