|
|
|
| Deflection angle perception and recognition method of robot spline assembly based on parameter optimization |
Le-wei ZHI( ),Jiao-liao CHEN*(),Jia-cai WANG,Fang XU,Li-bin ZHANG ),Jiao-liao CHEN*(),Jia-cai WANG,Fang XU,Li-bin ZHANG |
| College of Mechanical Engineering, Zhejiang University of Technology, Hangzhou 310013, China |
|
|
|
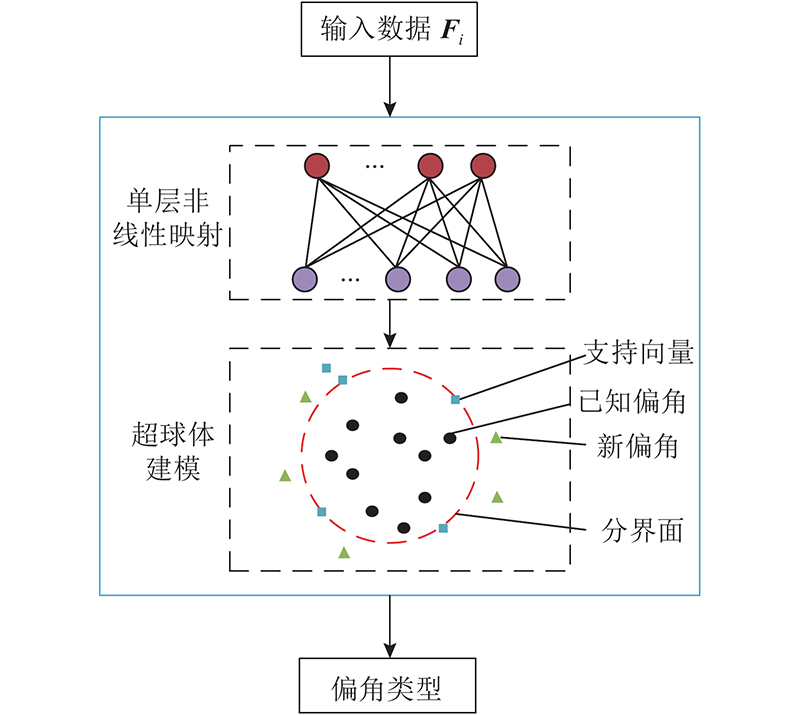
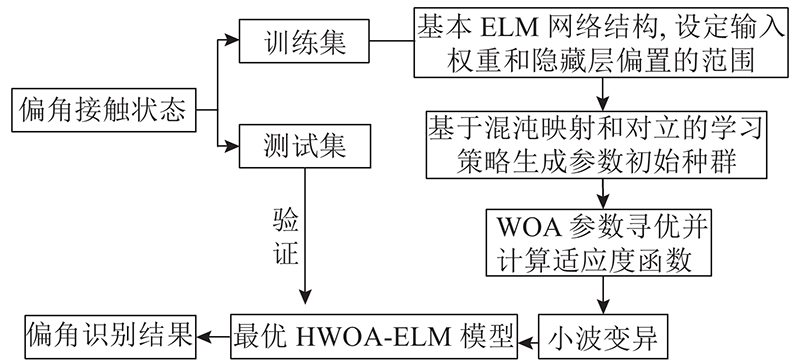
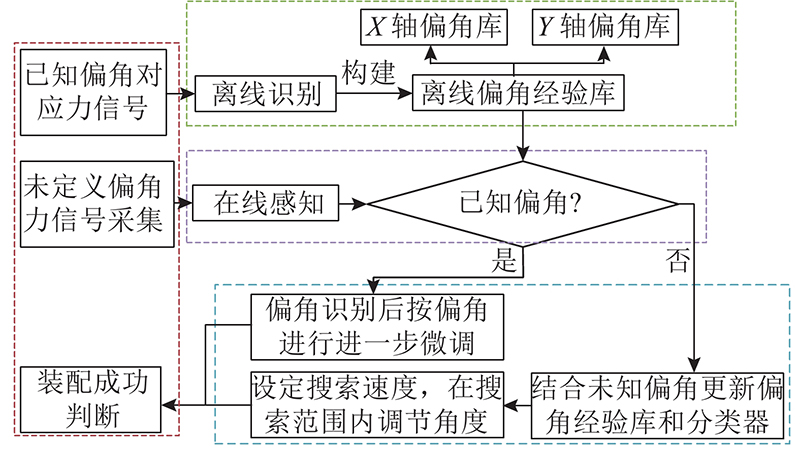
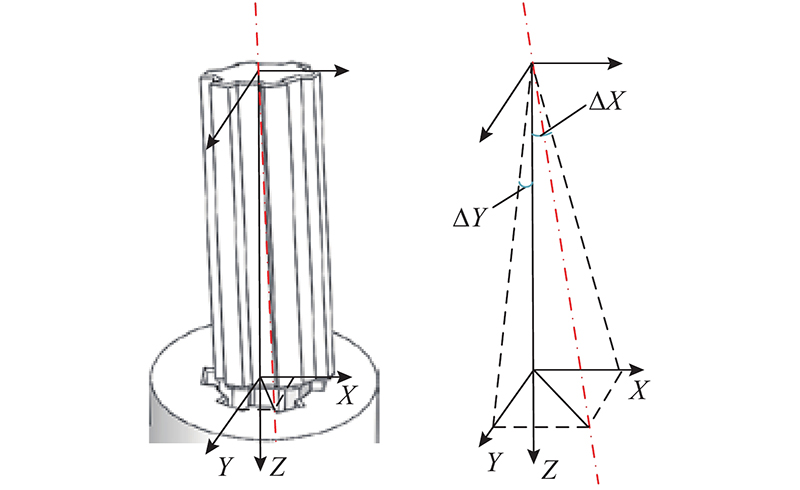
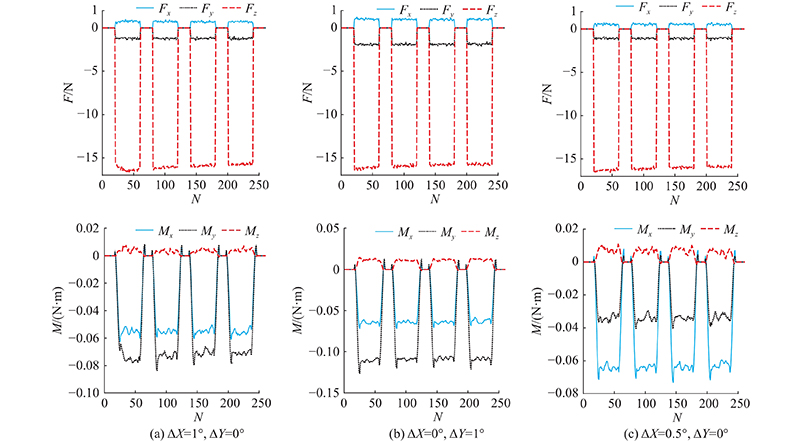
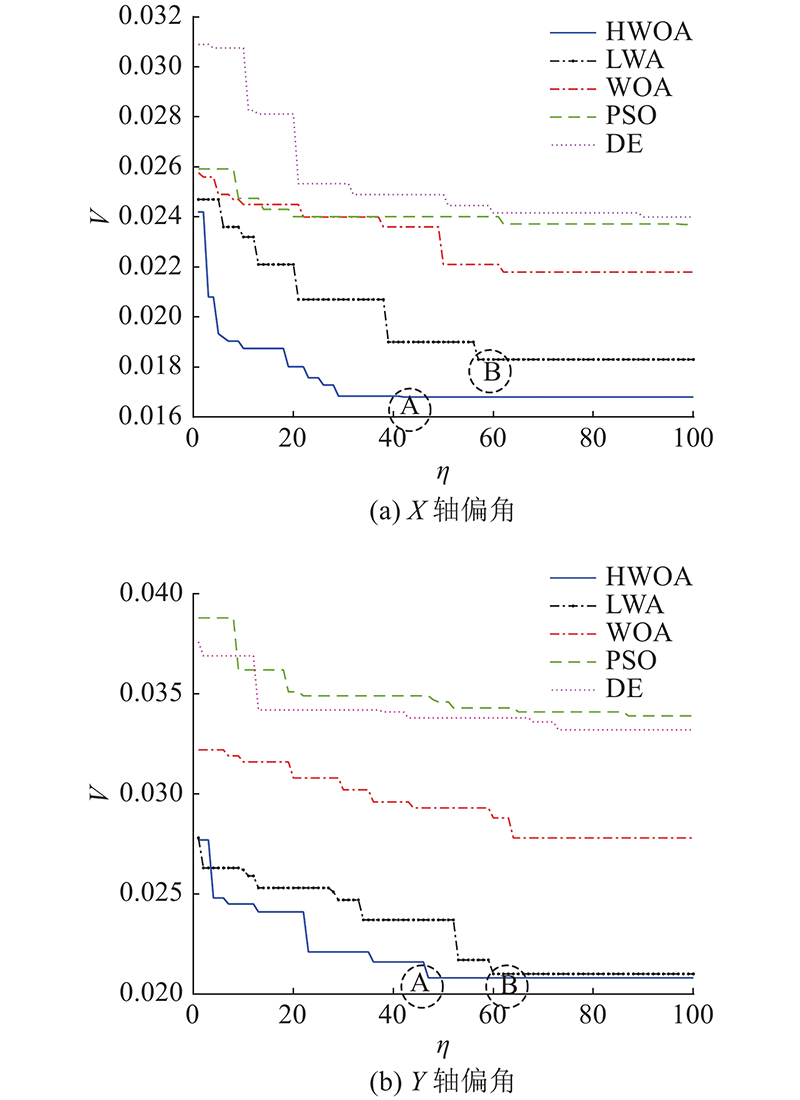
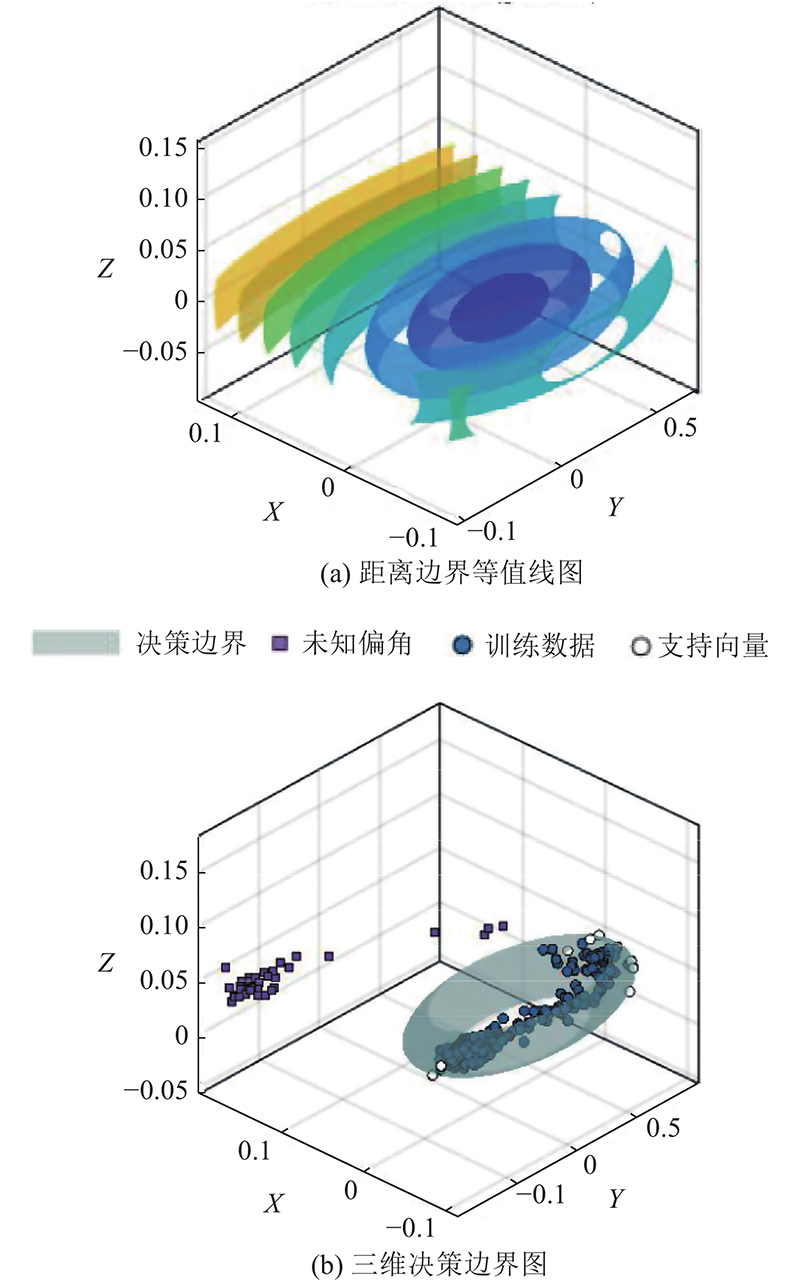
Abstract A method for perception and recognizing the deflection angle of robot spline assembly based on parameter optimization was proposed, aiming at the problem of low assembly success rate due to the deflection angle of the shaft hole during the spline assembly process. According to the characteristics of spline assembly, the force sensor was used to collect the force/torque signal during the spline assembly process, an extreme learning machine (ELM) based on the hybrid whale optimization algorithm (HWOA) was used to identify the force signal of deflection angle and construct a deflection angle experience library. Combined with the support vector data description (SVDD) algorithm the perception of undefined deflection angle and self-updating of deflection angle experience library were realized, and the perception and recognition of deflection angle to guide the robot to complete the spline assembly task was achieved. The experimental results show that the proposed method has a success rate of 98.8% for sensing undefined deflection angles and 98.12% for recognizing known deflection angles, and can effectively guide the spline assembly.
|
|
Received: 05 November 2021
Published: 29 March 2022
|
|
|
| Fund: 国家重点研发计划项目(2018YFC1309404);浙江省公益技术应用项目研究(LGG18E050023) |
|
Corresponding Authors:
Jiao-liao CHEN
E-mail: 1057576180@qq.com;jlchen@zjut.edu.cn
|
基于参数优化的机器人花键装配偏角感知识别方法
针对花键装配过程中存在轴孔偏角引起的卡阻导致装配成功率低的问题,提出基于参数优化的机器人花键装配偏角感知识别方法. 根据花键装配的特点,利用力传感器采集花键装配过程中的力/力矩信号,基于混合鲸鱼优化算法(HWOA)的极限学习机(ELM)识别偏角的力信号并构建偏角经验库. 结合支持向量数据描述(SVDD)算法,实现了未定义偏角的感知和偏角经验库的自我更新,以及用偏角的感知识别指导机器人完成花键装配任务. 实验结果表明,所提方法对未定义偏角感知成功率和对已知偏角的识别精度分别为98.8%、98.12%,能有效指导机器人进行花键装配.
关键词:
机器人,
花键装配,
偏角感知识别,
极限学习机,
混合鲸鱼优化算法
|
|
| [1] |
侯瑞 基于齿轴压装的花键自动对齿方法[J]. 机电工程技术, 2020, 49 (12): 214- 216
HOU Rui The method of spline automatic tooth alignment based on gear shaft press fitting[J]. Mechanical and Electrical Engineering Technology, 2020, 49 (12): 214- 216
doi: 10.3969/j.issn.1009-9492.2020.12.067
|
|
|
| [2] |
陈志英, 刘宏蕾, 周平 航空发动机套齿结构动态装配关系稳健性优化设计[J]. 推进技术, 2018, 39 (1): 160- 168
CHEN Zhi-ying, LIU Hong-lei, ZHOU Ping Robustness optimization of dynamic assembly parameters for aero-engine spline structure[J]. Journal of Propulsion Technology, 2018, 39 (1): 160- 168
|
|
|
| [3] |
WANG Y, YAO S W, YAN Q D, et al. The contact dynamic modeling and analysis based on spline assembly feature information [C]// Proceedings of the ASME International Mechanical Engineering Congress and Exposition. Phoenix: [s.n.], 2016: 66229.
|
|
|
| [4] |
LEE D H, NA M W, SONG J B, et al Assembly process monitoring algorithm using force data and deformation data[J]. Robotics and Computer-Integrated Manufacturing, 2019, 56: 149- 156
doi: 10.1016/j.rcim.2018.09.008
|
|
|
| [5] |
JAKOVLJEVIC Z, PETROVIC P B, HODOLIC J Contact states recognition in robotic part mating based on support vector machines[J]. The International Journal of Advanced Manufacturing Technology, 2012, 59 (1/4): 377- 395
doi: 10.1007/s00170-011-3501-5
|
|
|
| [6] |
WANG Z, BAI X L, ZHANG S S, et al Information-level real-time AR instruction: a novel dynamic assembly guidance information representation assisting human cognition[J]. The International Journal of Advanced Manufacturing Technology, 2020, 107 (3/4): 1463- 1481
doi: 10.1007/s00170-020-05034-1
|
|
|
| [7] |
IBRAHIM A A, KIM T, LOVE D J On the achievable rate of generalized spatial modulation using multiplexing under a Gaussian mixture model[J]. IEEE Transactions on Communications, 2016, 64 (4): 1588- 1599
doi: 10.1109/TCOMM.2016.2515624
|
|
|
| [8] |
WU B L, QU D K, FANG X. Improving efficiency with orthogonal exploration for online robotic assembly parameter optimization [C]// proceedings of 2015 IEEE International Conference on Robotics and Biomimetics. Zhuhai: IEEE, 2015: 958-963.
|
|
|
| [9] |
杨旭亭, 王孜悦, 李凤鸣, 等 基于过程建模的机器人分阶引导装配方法[J]. 计算机集成制造系统, 2021, 27 (8): 2321- 2330
YANG Xu-ting, WANG Zi-yue, LI Feng-ming, et al Robot phased guided assembly based on process modeling[J]. Computer Integrated Manufacturing Systems, 2021, 27 (8): 2321- 2330
|
|
|
| [10] |
季旭全, 王君臣, 赵江地, 等 基于机器人与视觉引导的星载设备智能装配方法[J]. 机械工程学报, 2018, 54 (23): 63- 72
JI Xu-quan, WANG Jun-chen, ZHAO Jiang-di, et al Intelligent robotic assembly method of spaceborne equlpment based on visual guidance[J]. Journal of Mechanical Engineering, 2018, 54 (23): 63- 72
doi: 10.3901/JME.2018.23.063
|
|
|
| [11] |
张思思, 李凤鸣, 杨旭亭, 等 基于接触状态感知发育的机器人柔性装配方法[J]. 控制与决策, 2021, 36 (4): 876- 884
ZHANG Si-si, LI Feng-ming, YANG Xu-ting, et al Flexible assembly method based on contact state perception development[J]. Control and Decision, 2021, 36 (4): 876- 884
|
|
|
| [12] |
柯懂湘, 潘丽敏, 罗森林, 等 基于随机森林算法的 Android 恶意行为识别与分类方法[J]. 浙江大学学报: 工学版, 2019, 53 (10): 2013- 2023
KE Dong-xiang, PAN Li-min, LUO Sen-lin, et al Android malicious behavior recognition and classification method based on random forest algorithm[J]. Journal of Zhejiang University: Engineering Science, 2019, 53 (10): 2013- 2023
doi: 10.3785/j.issn.1008-973X.2019.10.019
|
|
|
| [13] |
李宝胜, 秦传东 基于粒子群优化的SVM多分类的电动车价格预测研究[J]. 计算机科学, 2020, 47 (2): 421- 424
LI Bao-sheng, QIN Chuan-dong Study on electric vehicle price prediction based on PSO-SVM multi-classification method[J]. Computer Science, 2020, 47 (2): 421- 424
|
|
|
| [14] |
HUANG G B, ZHU Q Y, SIEW C K Extreme learning machine: theory and applications[J]. Neurocomputing, 2006, 70 (1/3): 489- 501
doi: 10.1016/j.neucom.2005.12.126
|
|
|
| [15] |
ZENG J, ROY B, KUMAR D, et al. Proposing several hybrid PSO-extreme learning machine techniques to predict TBM performance [J/OL]. Engineering with Computers, 2021 [2021-10-27]. https://doi.org/10.1007/s00366-020-01225-2.
|
|
|
| [16] |
卢彩霞, 王新环, 王全义 基于GA-ELM的电压暂降源识别研究[J]. 传感器与微系统, 2020, 39 (12): 64- 67
LU Cai-xia, WANG Xin-huan, WANG Quan-yi Research on recognition of voltage sag source based on GA-ELM[J]. Transducer and Microsystem Technologies, 2020, 39 (12): 64- 67
|
|
|
| [17] |
AL-ZOUBI A M, FARIS H, ALQATAWNA J, et al Evolving support vector machines using whale optimization algorithm for spam profiles detection on online social networks in different lingual contexts[J]. Knowledge-Based Systems, 2018, 153: 91- 104
doi: 10.1016/j.knosys.2018.04.025
|
|
|
| [18] |
ALJARAH I, FARIS H, MIRJALILI S Optimizing connection weights in neural networks using the whale optimization algorithm[J]. Soft Computing, 2018, 22 (1): 1- 15
doi: 10.1007/s00500-016-2442-1
|
|
|
| [19] |
ZHANG J, WANG J S Improved whale optimization algorithm based on nonlinear adaptive weight and golden sine operator[J]. IEEE Access, 2020, 8: 77013- 77048
doi: 10.1109/ACCESS.2020.2989445
|
|
|
| [20] |
ABD-ELAZIZ M, OLIVA D Parameter estimation of solar cells diode models by an improved opposition-based whale optimization algorithm[J]. Energy Conversion and Management, 2018, 171: 1843- 1859
doi: 10.1016/j.enconman.2018.05.062
|
|
|
| [21] |
吴润秀, 孙辉, 朱德刚, 等 具有高斯扰动的局部引导粒子群优化算法[J]. 计算机工程与科学, 2016, 38 (6): 1183- 1192
WU Run-xiu, SUN Hui, ZHU De-gang, et al A particle swarm optimization algorithm based on local guidance and Gauss perturbation[J]. Computer Engineering and Science, 2016, 38 (6): 1183- 1192
doi: 10.3969/j.issn.1007-130X.2016.06.018
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|