|
|
|
| Variable stiffiness control for human-robot cooperative transportation based on imitation learning |
Zi-lin TANG1,2( ),Xiao GAO1,2,Xiao-hui XIAO1,2,*() ),Xiao GAO1,2,Xiao-hui XIAO1,2,*() |
1. School of Power and Mechanical Engineering, Wuhan University, Wuhan 430072, China
2. National Key Laboratory of Human Factors Engineering, China Astronauts Research and Training Center, Beijing 100094, China |
|
|
|
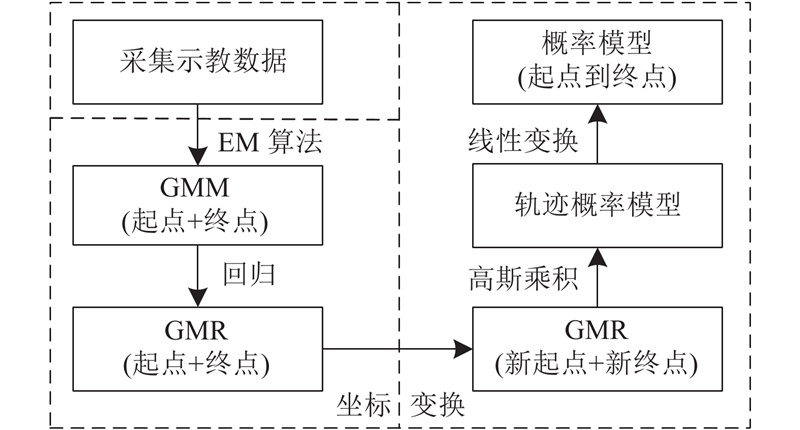
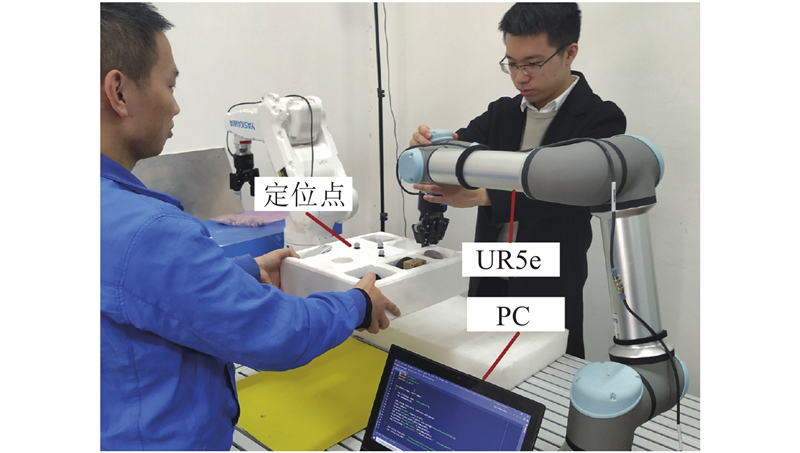
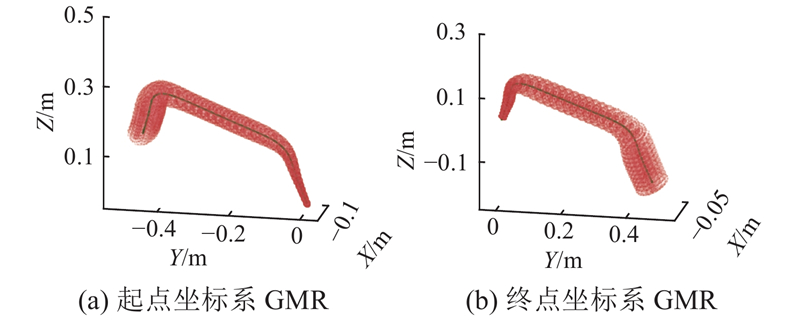
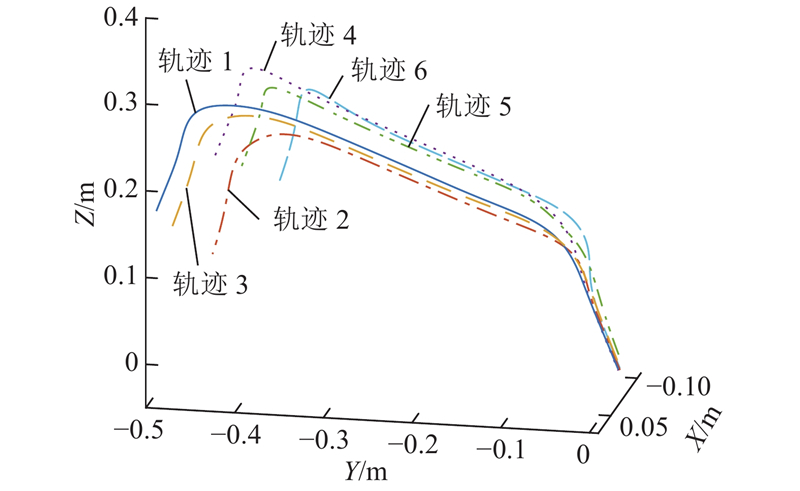
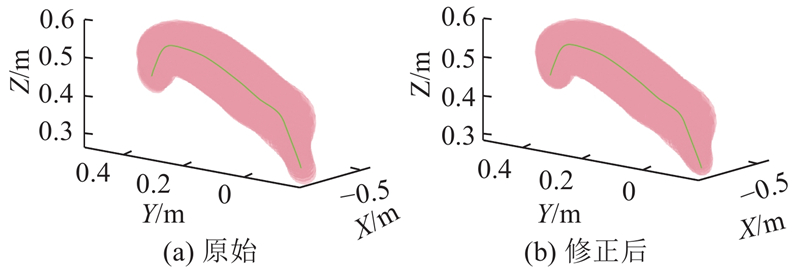
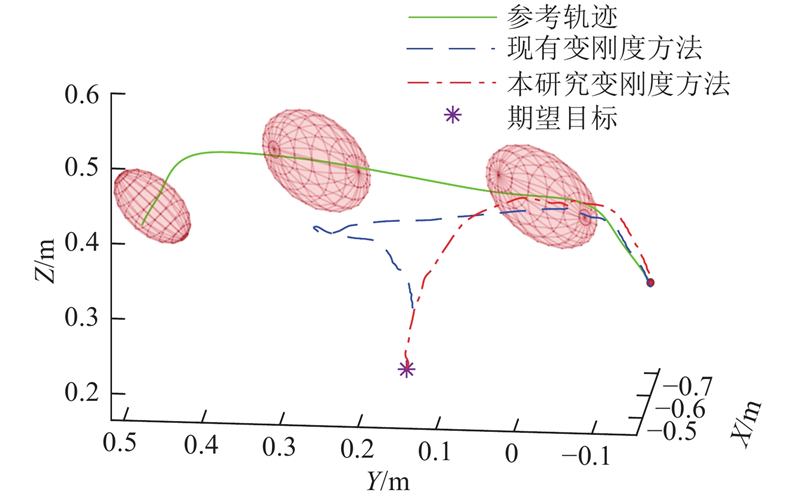
Abstract Aiming at human-robot cooperative transportation, current control strategies are difficult to guarantee both the compliant control for cooperative transportation and the accuracy of the end point, and lack sufficient flexibility to different tasks. A variable stiffiness control strategy was proposed for cooperative transportation based on imitation learning. Firstly, several human demonstrations of cooperative transportation were encoded in task parameterized Gaussian mixture model (TP-GMM) and a probabilistic model of trajectories under different transport conditions was learned. Secondly, combined with admittance control, an interactive model of variable stiffness at the end of the manipulator was established for transportation to realize compliant control. Besides, a strategy of switching between different transportation tasks was developed with a threshold method of interaction force. Finally, a cooperative transportation platform was built for experiments. Results show that the proposed approach can improve the position accuracy of the end point to 1.9 mm in specific tasks while achieving compliant control for cooperative transportation, and ensure that the end effector of the robot in specific tasks is controlled to moved in desired space and the switching of transportation tasks is available.
|
|
Received: 27 October 2020
Published: 05 November 2021
|
|
|
| Fund: 人因工程国防科技重点实验室开放基金资助项目(6142222180311);空间智能控制技术国防科技重点实验室开放基金资助项目(6142208180301) |
|
Corresponding Authors:
Xiao-hui XIAO
E-mail: yangbenbo@whu.edu.cn;xhxiao@whu.edu.cn
|
基于模仿学习的变刚度人机协作搬运控制
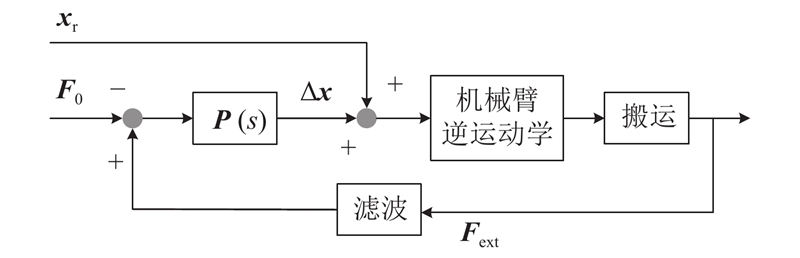
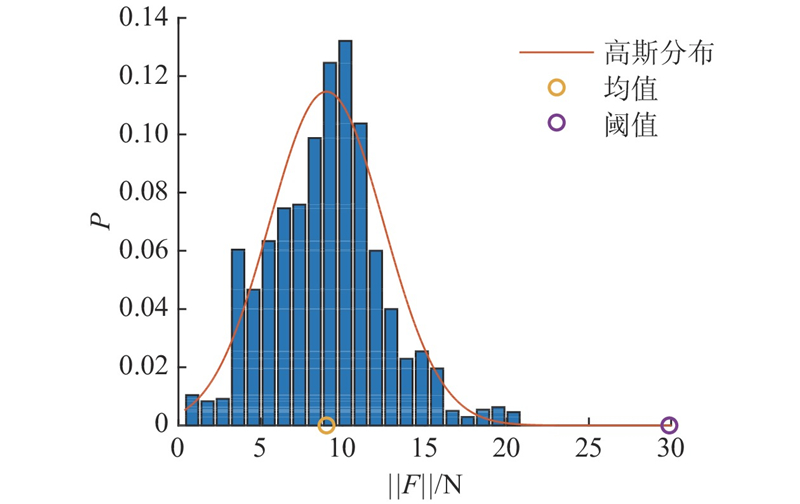
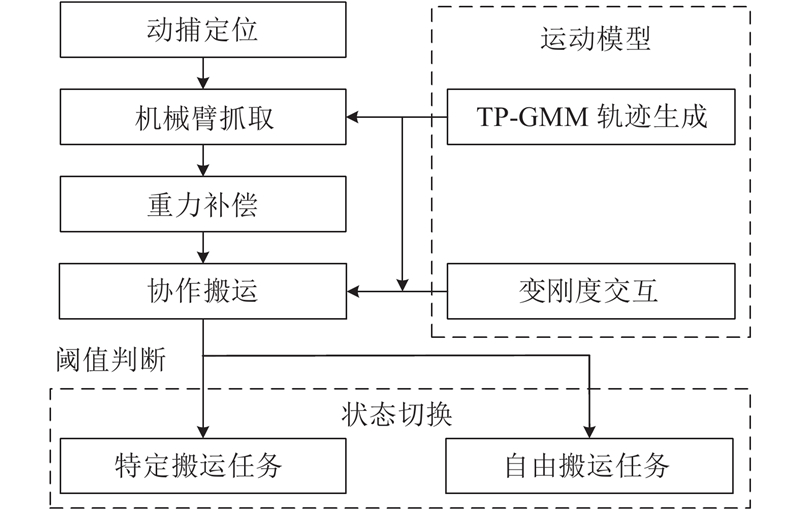
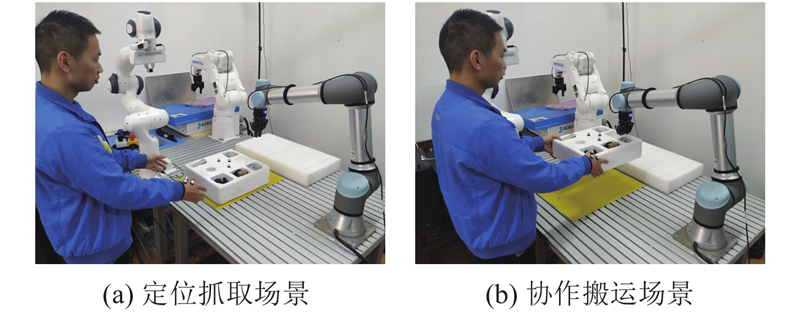
针对人-机器人协作搬运,现有的控制策略难以同时保证搬运过程的柔顺性和搬运终点位置的精确性,而且对不同搬运任务适应性不够. 基于模仿学习提出变刚度协作搬运控制策略. 使用任务参数化的高斯混合模型(TP-GMM)对多次搬运示教数据进行编码,学习不同搬运工况下的搬运轨迹概率模型;结合导纳控制建立机械臂末端变刚度交互模型,实现柔性搬运操作,并基于交互力阈值实现不同搬运任务的切换;搭建协作搬运平台进行实验验证. 实验结果表明,提出的策略在实现柔性协作搬运的同时将特定搬运任务的终点位置精度提高到1.9 mm,且保证了特定搬运任务中机械臂末端在期望区域内运动以及搬运任务的切换.
关键词:
人机协作搬运,
模仿学习,
变刚度,
导纳控制,
柔性交互
|
|
| [1] |
AJOUDANI A, ZANCHETTIN A M, IVALDI S, et al Progress and prospects of the human-robot collaboration[J]. Autonomous Robots, 2018, 42 (5): 957- 975
doi: 10.1007/s10514-017-9677-2
|
|
|
| [2] |
吕而立. 基于模仿学习和隐马尔可夫模型的人机交互研究 [D]. 深圳: 哈尔滨工业大学深圳研究生院, 2016.
LYU Er-li. Human-robot interaction based on imitation learning and hidden Markov model [D]. Shenzhen: Harbin Institute of Technology, Shenzhen, 2016.
|
|
|
| [3] |
CALDERONE L. Collaborative robots working in manufacturing [EB/OL]. (2016-02-05)[2021-01-21]. https://www.manufacturingtomorrow.com/article/2016/02/collaborative-robots-working-in-manufacturing/7672/.
|
|
|
| [4] |
BUSSY A, GERGONDET P, KHEDDAR A, et al. Proactive behavior of a humanoid robot in a haptic transportation task with a human partner [C]// 2012 IEEE RO-MAN: the 21st IEEE International Symposium on Robot and Human Interactive Communication. Paris: IEEE, 2012: 962-967.
|
|
|
| [5] |
AGRAVANTE D J, CHERUBINI A, BUSSY A, et al. Collaborative human-humanoid carrying using vision and haptic sensing [C]// 2014 IEEE International Conference on Robotics and Automation (ICRA). Hong Kong: IEEE, 2014, 607-612.
|
|
|
| [6] |
AGRAVANTE D J, CHERUBINI A, BUSSY A, et al. Human-humanoid joint haptic table carrying task with height stabilization using vision [C]// 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems. Tokyo: IEEE, 2013, 4609–4614.
|
|
|
| [7] |
于建均, 门玉森, 阮晓钢, 等 模仿学习在机器人仿生机制研究中的应用[J]. 北京工业大学学报, 2016, 42 (2): 210- 216
YU Jian-jun, MEN Yu-sen, RUAN Xiao-gang, et al Application of imitation learning in the research of bionic mechanism of robots[J]. Journal of Beijing University of Technology, 2016, 42 (2): 210- 216
|
|
|
| [8] |
VOGT D, STEPPUTTIS S, GREHL S, et al. A system for learning continuous human-robot interactions from human-human demonstrations [C]// 2017 IEEE International Conference on Robotics and Automation (ICRA). Singapore: IEEE, 2017, 2882-2889.
|
|
|
| [9] |
GU Y, THOBBI A, SHENG W. Human-robot collaborative manipulation through imitation and reinforcement learning [C]// 2011 IEEE International Conference on Information and Automation. Shenzhen: IEEE, 2011, 151-156.
|
|
|
| [10] |
EVRARD P, GRIBOVSKAYA E, CALINON S, et al. Teaching physical collaborative tasks: object-lifting case study with a humanoid [C]// 2009 9th IEEE-RAS International Conference on Humanoid Robots. Paris: IEEE, 2009, 399-404.
|
|
|
| [11] |
NEMEC B, LIKAR N, GAMS A, et al Human robot cooperation with compliance adaptation along the motion trajectory[J]. Autonomous Robots, 2018, 42 (5): 1023- 1035
doi: 10.1007/s10514-017-9676-3
|
|
|
| [12] |
ROZO L, CALINON S, CALDWELL D G, et al Learning physical collaborative robot behaviors from human demonstrations[J]. IEEE Transactions on Robotics, 2016, 32 (3): 513- 527
doi: 10.1109/TRO.2016.2540623
|
|
|
| [13] |
ROZO L, BRUNO D, CALINON S, et al. Learning optimal controllers in human-robot cooperative transportation tasks with position and force constraints [C]// 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Hamburg: IEEE, 2015, 1024-1030.
|
|
|
| [14] |
ROZO L, BRUNO D, CALINON S, et al. Learning force and position constraints in human-robot cooperative transportation [C]// The 23rd IEEE International Symposium on Robot and Human Interactive Communication. Edinburgh: IEEE, 2014, 619-624.
|
|
|
| [15] |
CALINON S A tutorial on task-parameterized movement learning and retrieval[J]. Intelligent Service Robotics, 2016, 9 (1): 1- 29
doi: 10.1007/s11370-015-0187-9
|
|
|
| [16] |
MEDINA J R, LAWITZKY M, MORTL A, et al. An experience-driven robotic assistant acquiring human knowledge to improve haptic cooperation [C]// 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems. San Francisco: IEEE, 2011, 2416-2422.
|
|
|
| [17] |
DUMORA J, GEFFARD F, BIDARD C, et al. Robot assistance selection for large object manipulation with a human [C]// 2013 IEEE International Conference on Systems, Man, and Cybernetics. Manchester: IEEE, 2013, 1828-1833.
|
|
|
| [18] |
CALINON S. Robot programming by demonstration: a probabilistic approach [M]. Lausanne: EPFL Press, 2009.
|
|
|
| [19] |
LYNCH K M, PARK F C. Modern robotics mechanics, planning, and control [M]. Cambridge: Cambridge University Press, 2017.
|
|
|
| [20] |
孟晓华, 吴小霞, 黄敏. 概率论与数理统计 [M]. 武汉: 华中科技大学出版社, 2019.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|