The power motor of intelligent equipment in hot cells of nuclear industry is prone to failure due to nuclear radiation, so the adoption of remote handling motor replacement technology is the key to the normal operation of intelligent equipment in hot cells. To solve the above problem, the design requirements of remote handling motor replacement device were analyzed, and the remote handling motor replacement method based on passive compliance was proposed. Three contact states of the shaft hole assembly were performed, and the mechanical model of motor vertical insertion was constructed. A motor docking strategy was put forward, and a five-degree of freedom (5-DOF) space passive compliant mechanism was designed. The remote handling motor replacement device structure and the remote handling replacement work flow were designed based on the characteristics of the remote operation robotic arm in hot cells. Experimental device was manufactured, and the success rate and the time-consuming of remote handling replacement were counted. In addition, the actual test value and the theoretical value of insertion force predicted by the motor vertical insertion mechanical model were compared. Results verified the reliability of the remote handling motor replacement device and the effectiveness of the motor vertical insertion mechanical model. The proposed technology provides basic technology for the automatic maintenance of intelligent equipment in hot cells, and also provides inspiration for the robot to perform other automated assembly tasks.
Jun-xia JIANG,Xin-yuan ZHANG,Bang-ming TAO,Qun DONG. Design and experiment of remote handling motor replacement device based on passive compliant mechanism. Journal of ZheJiang University (Engineering Science), 2021, 55(5): 855-865.
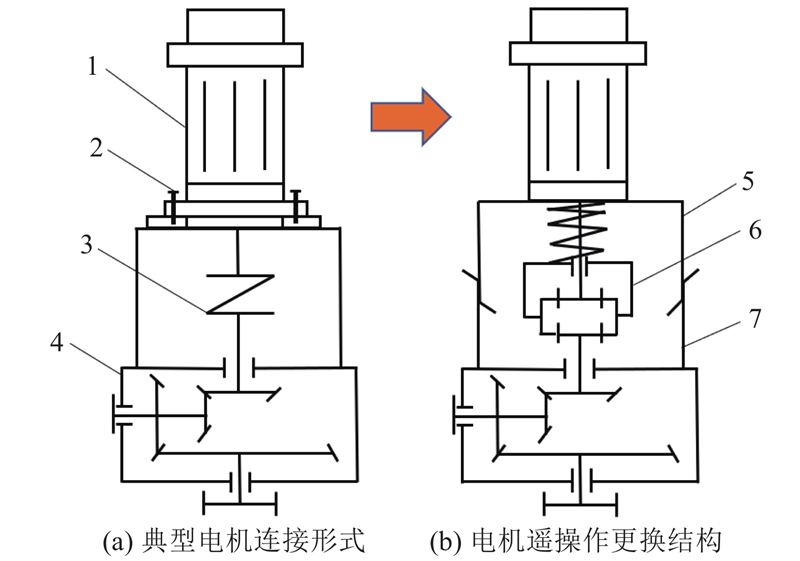
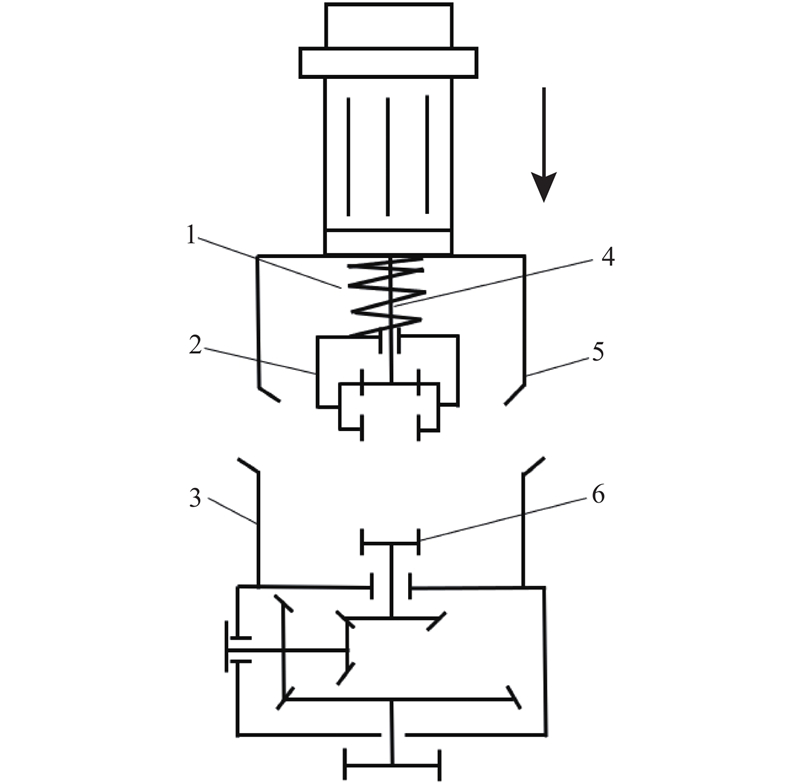
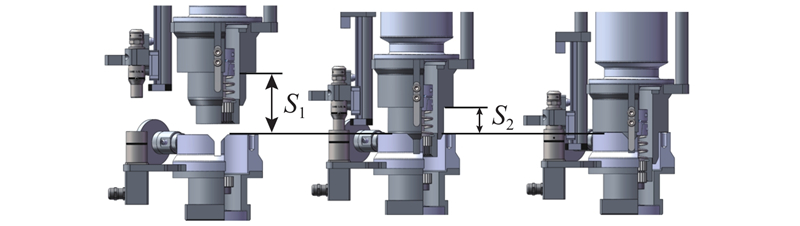
Fig.2Schematic diagram of remote handling motor replacement
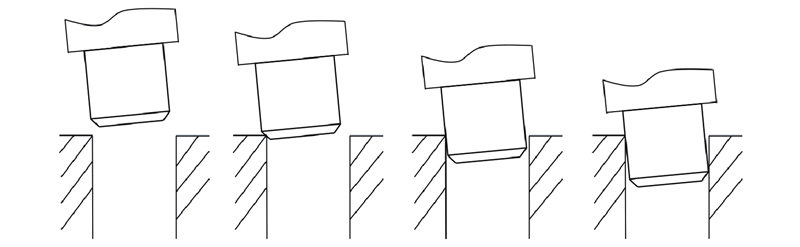
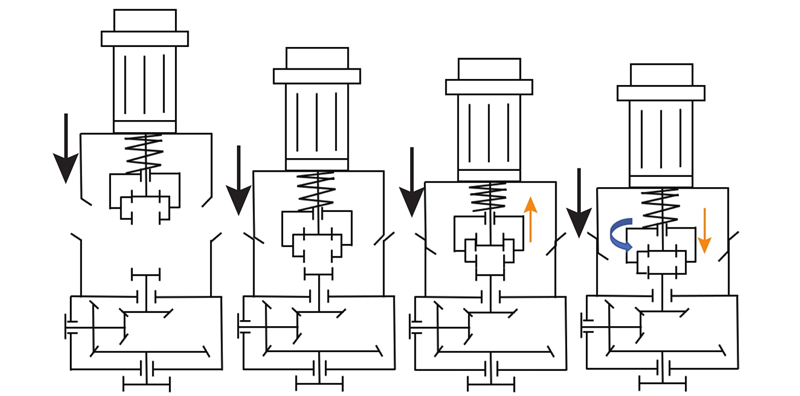
Fig.3Four stages of hole-shaft assembly
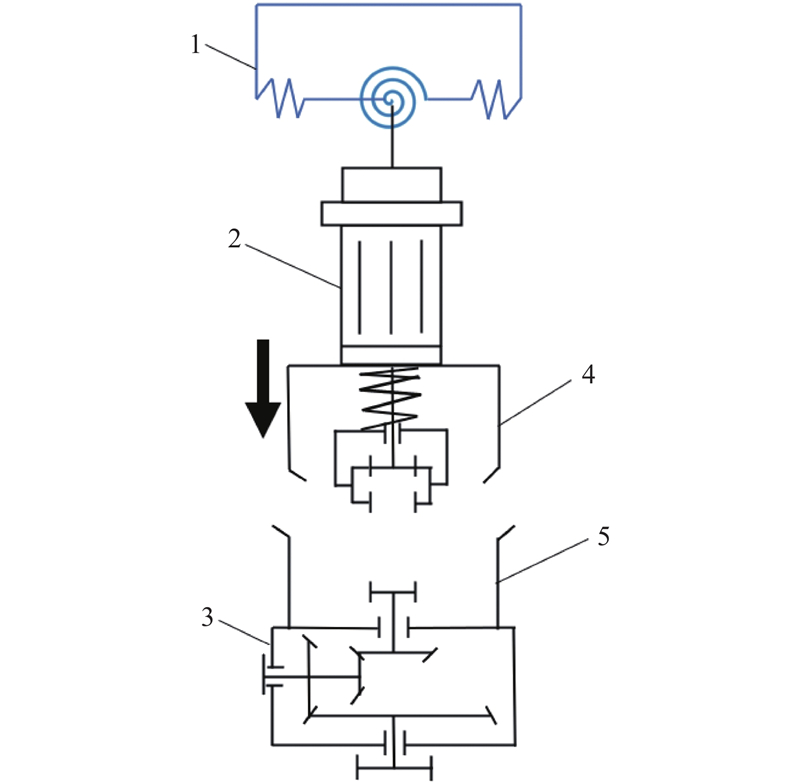
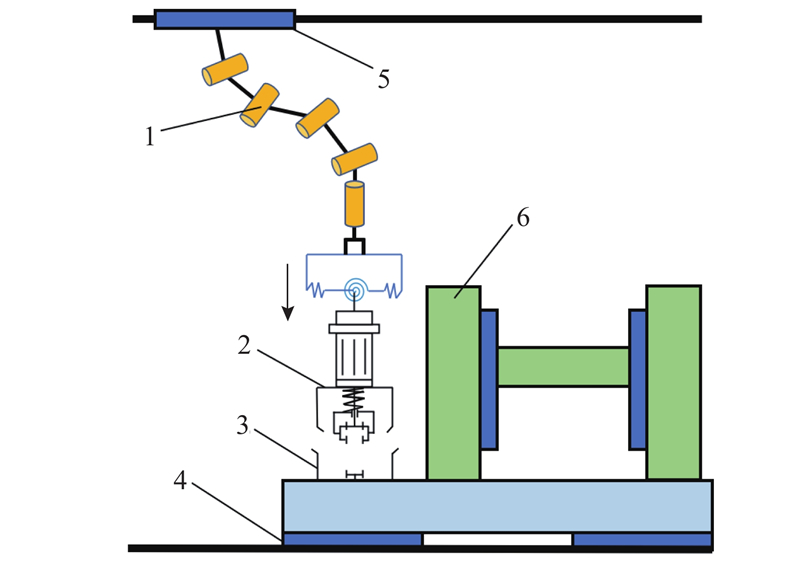
Fig.4On-site schematic diagram of remote handling motor replacement
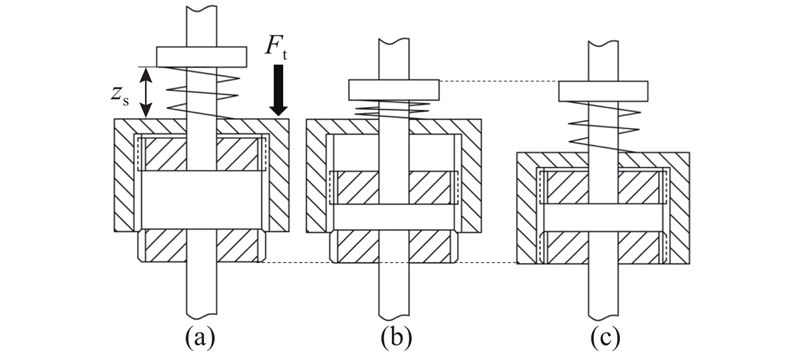
Fig.5Schematic diagram of motion docking
Fig.6Process chart of motion docking
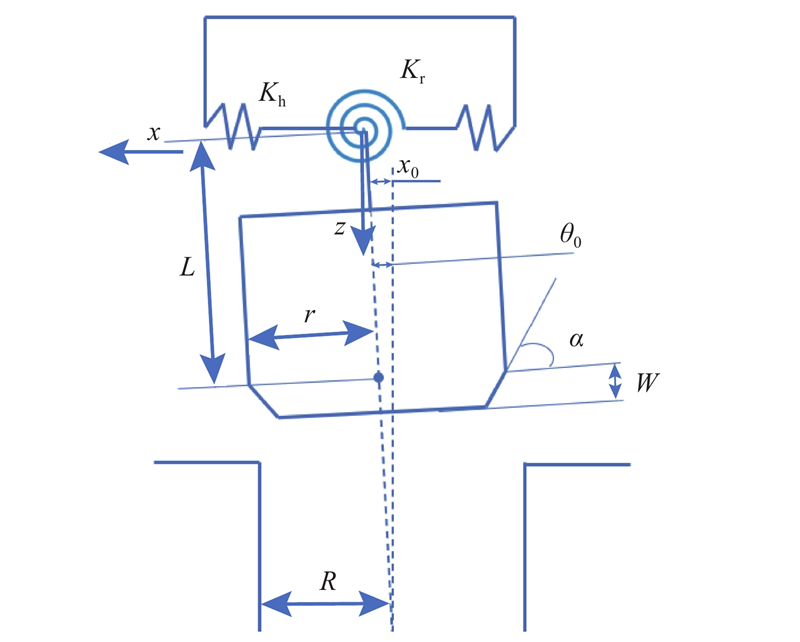
Fig.7Schematic diagram of compliant assembly
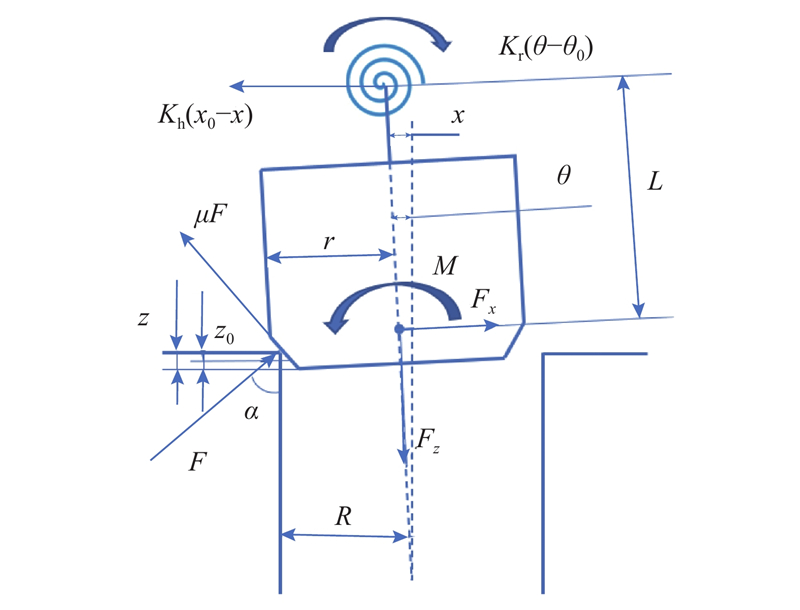
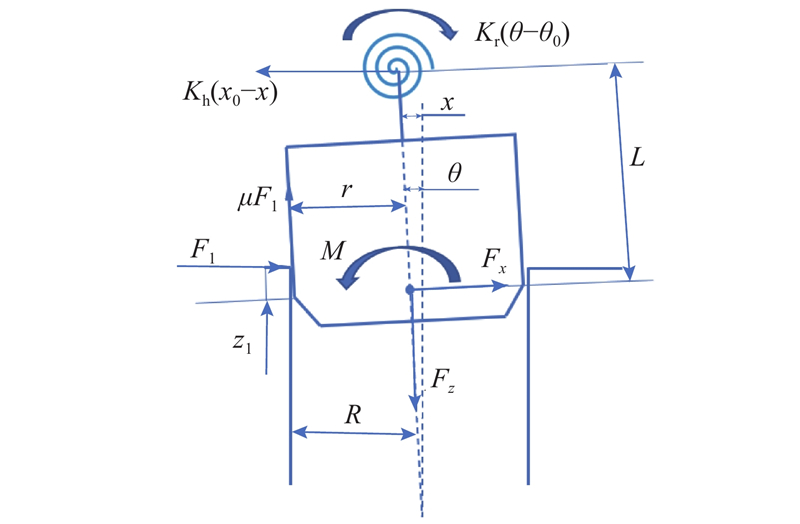
Fig.8Force model during chamfer crossing
Fig.9Force model through one-point contact
Fig.10Force model during two-point contact
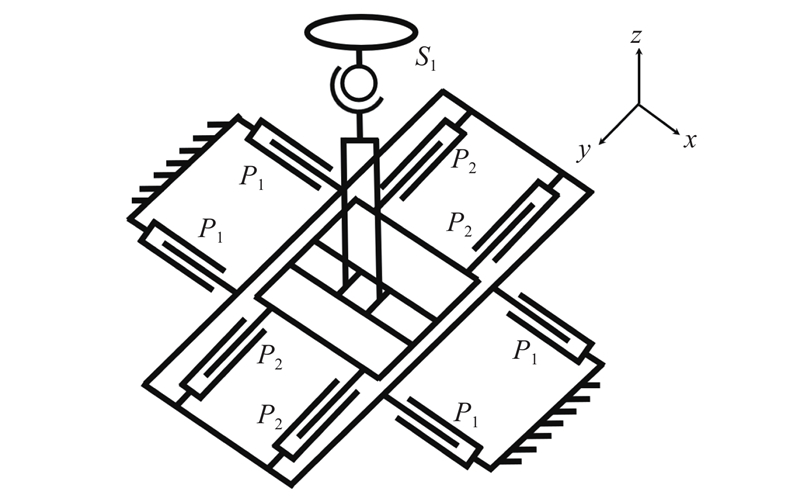
Fig.11Schematic diagram of 5-DOF passive compliant mechanism
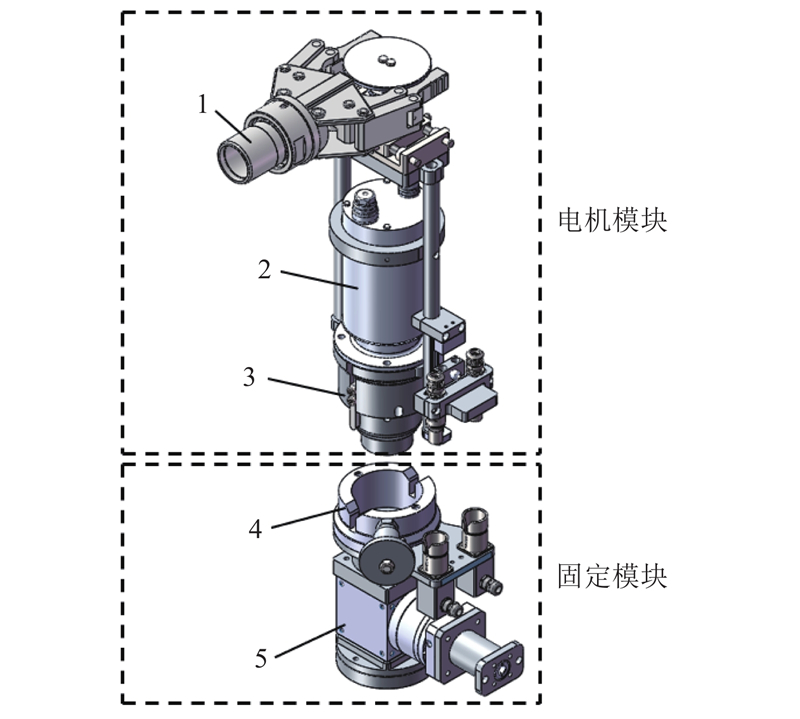
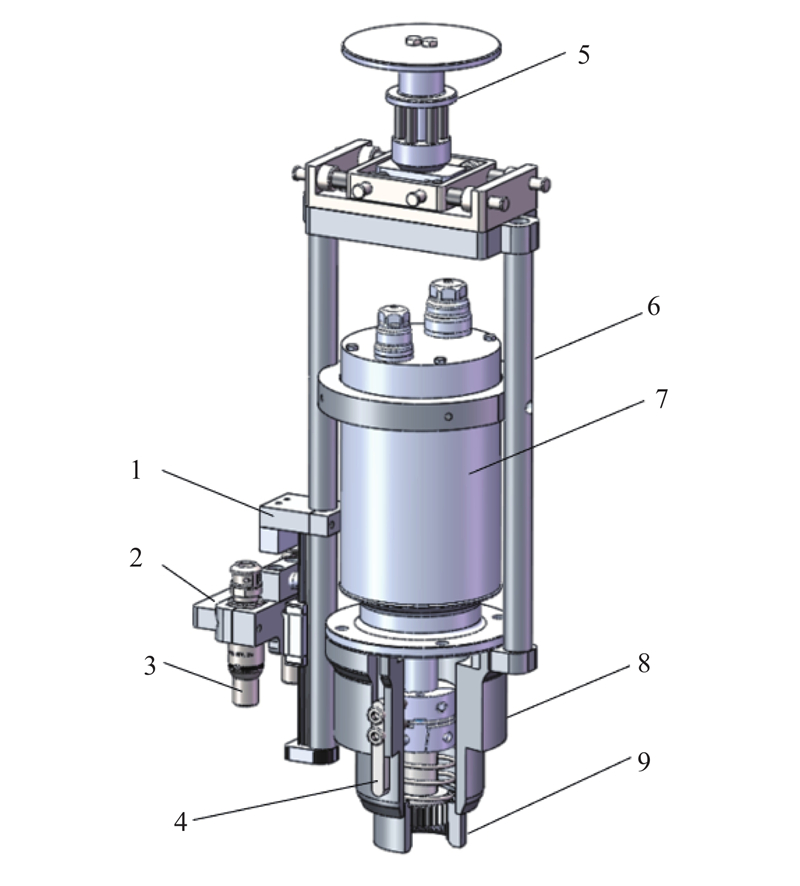
Fig.12Structure design of remote handling motor replacement device
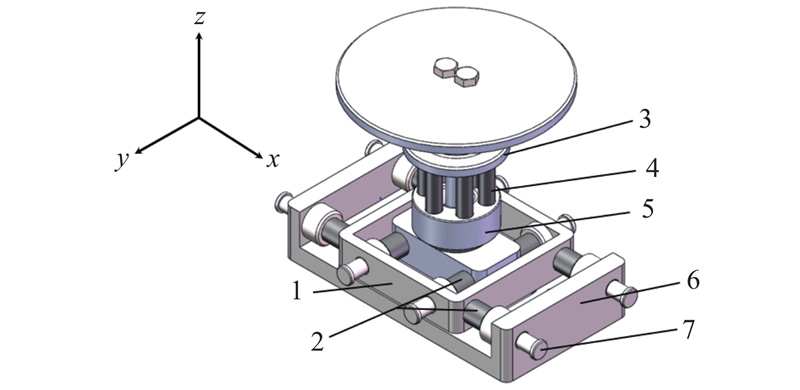
Fig.13Structure diagram of compliant mechanism
孔轴参数
数值
装配参数
数值
实验参数
数值
2R
90 mm
W
10 mm
x0
4 mm
2r
89.96 mm
α
1/3 rad
θ0
0.05 rad
L
373 mm
LMAX
50 mm
μ
0.15
Tab.1Initial parameter of Matlab simulation
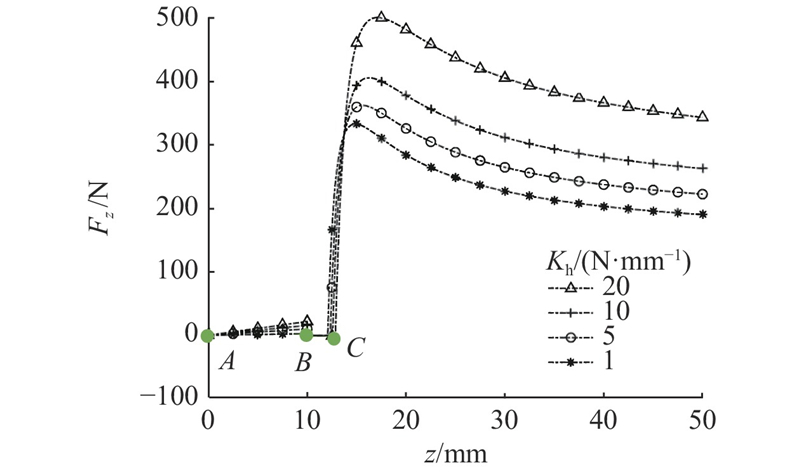
Fig.14Effect of horizontal stiffness on insertion force
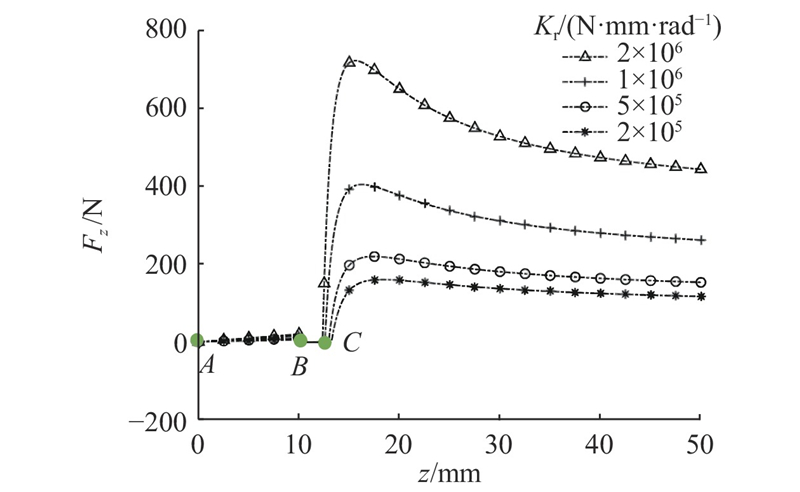
Fig.15Effect of rotational stiffness on insertion force
Fig.16Structure diagram of motor component
Fig.17Structure diagram of fixed components
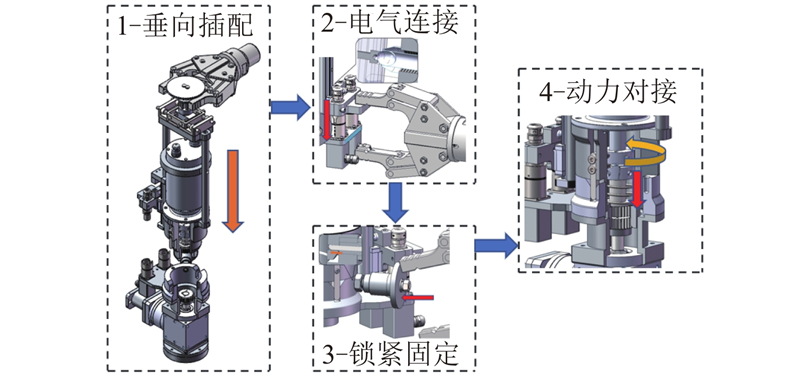
Fig.18Schematic of remote handling motor replacement
Fig.19Positioning process of guide flange
Fig.20Process of motion docking
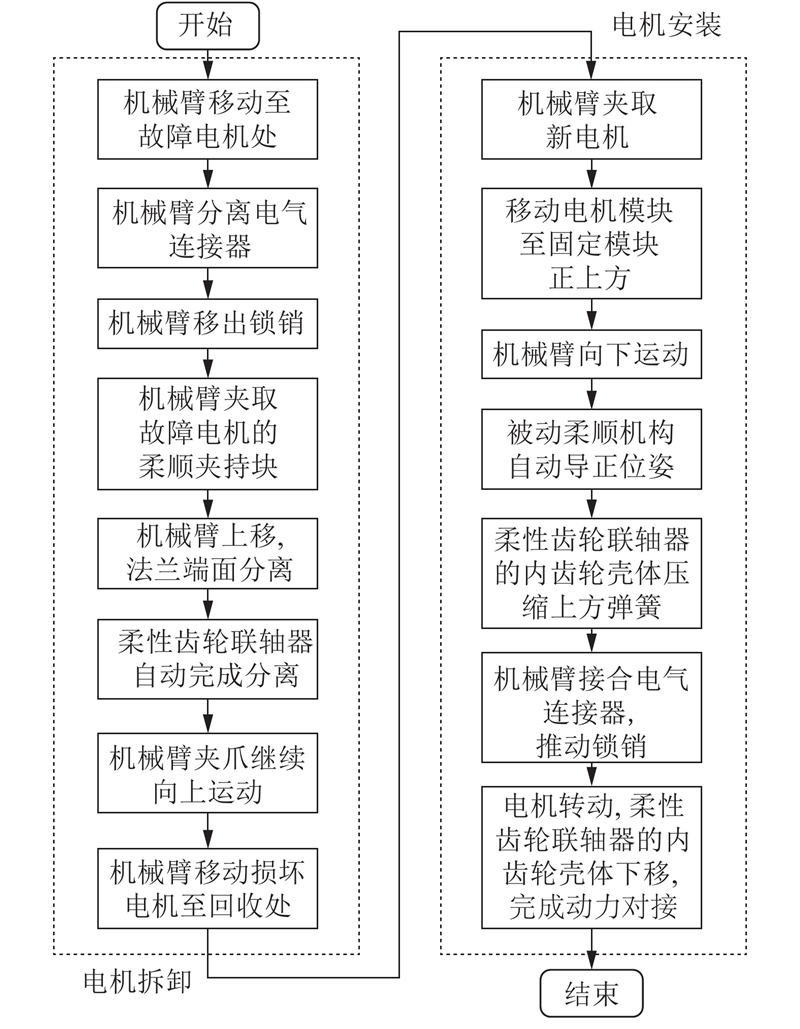
Fig.21Flowchart of remote handling motor replacement
Fig.22Experiment site of remote handling motor replacement
孔轴参数
数值
装配参数
数值
实验参数
数值
2R
90 mm
W
10 mm
x
0~6 mm
2r
89.96 mm
α
1/3 rad
θ
0~0.05 rad
L
373 mm
LMAX
50 mm
m0g
153 N
μ
0.15
z
0~50 mm
z0
0 mm
Tab.2Parameters of remote handling motor replacement device
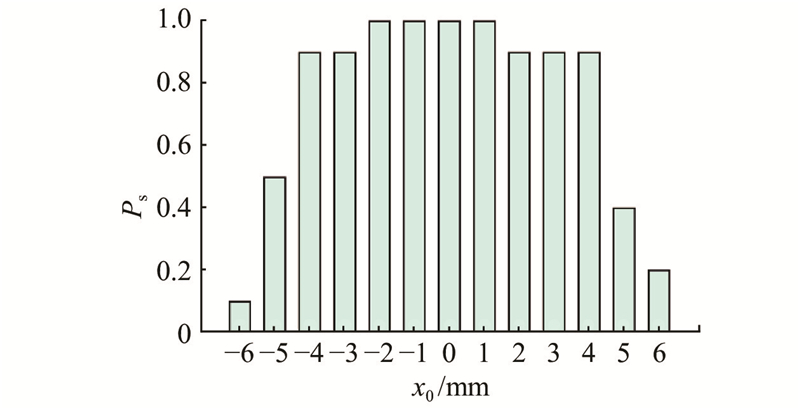
Fig.23Success rate under different errors
Fig.24Actual insertion force measured in experiment
[1]
王鹏飞. 托卡马克类超冗余机械臂结构综合及入腔运动规划[D]. 上海: 上海交通大学, 2017. WANG Peng-fei. Structure synthesis and motion planning of entering Tokamak for Tokamak-type hyper-redundant manipulator[D]. Shanghai: Shanghai Jiaotong University, 2017.
[2]
吴炳龙, 曲道奎, 徐方 基于力/位混合控制的工业机器人精密轴孔装配[J]. 浙江大学学报: 工学版, 2018, 52 (1): 165 WU Bing-long, QU Dao-kui, XU Fang Industrial robot high precision peg-in-hole assembly based on hybrid force/position control[J]. Journal of Zhejiang University: Engineering Science, 2018, 52 (1): 165
[3]
BABACI S, AMIRAT Y, PONTNAU J, et al. Fuzzy adaptation impedance of a 6-DOF parallel robot application to peg in hole insertion [C]// Proceedings of 5th IEEE International Conference on Fuzzy Systems. New Orleans: IEEE Computer Society Press, 1996: 1770-1776.
[4]
CHAN S P, LIAW H C Generalized impedance control of robot for assembly tasks requiring compliantmanipulation[J]. IEEE Transaction on Industrial and Electronics, 1996, 43 (4): 453- 461
doi: 10.1109/41.510636
[5]
JEAN J H, FU L C Adaptive hybrid control strategies for constrained robots[J]. IEEE Transactions on Automatic Control, 1993, 38 (4): 598- 603
doi: 10.1109/9.250529
[6]
JEON D, TOMIZUKA M Learning hybrid force and position control of robot manipulators[J]. IEEE Transactions on Robotics and Automation, 1993, 9 (4): 423- 430
doi: 10.1109/70.246053
[7]
IOSSIFIDIS I, SCHONER G. Dynamical systems approach for the autonomous avoidance of obstacles and joint-limits for an redundant robot arm [C]// Proceedings of the 2006 IEEE International Conference on Intelligent Robots and Systems. Beijing: IEEE, 2006: 580-585.
[8]
王刚, 吴广顺 机器人装配作业的主被动复合柔顺[J]. 中国机械工程, 1998, (9): 62- 64 WANG Gang, WU Guang-shun Active passive compound compliance in the robotic assembly process[J]. Chinese Journal of Mechanical Engineering, 1998, (9): 62- 64
[9]
李裕超. 飞机部件轴孔柔顺装配系统设计研究[D]. 杭州: 浙江大学, 2016. LI Yu-chao. Research on peg-hole compliant assembly system of aircraft components [D]. Hangzhou: Zhejiang University, 2016.
[10]
彭商贤, 金佐中 机器人柔顺装配的几何及力学分析研究[J]. 机械工程学报, 1995, (6): 53- 60 PENG Shang-xian, JIN Zuo-zhong Research on geometric and mechanical analysis of robot compliant assembly[J]. Chinese Journal of Mechanical Engineering, 1995, (6): 53- 60
doi: 10.3321/j.issn:0577-6686.1995.06.015
[11]
DU K L, ZHANG B B, HUANG X, et al. Dynamic analysis of assembly process with passive compliance for robot manipulators[C]// Computational Intelligence in Robotics and Automation Proceedings. Kobe: IEEE, 2003: 1168-1173.
[12]
CHEN Y Z, XIE F G, LIU X J, et al Error modeling and sensitivity analysis of a parallel robot with SCARA (selective compliance assembly robot arm) motions[J]. Chinese Journal of Mechanical Engineering, 2014, 27 (4): 693- 702
doi: 10.3901/CJME.2014.0423.082
[13]
WHITNEY D E Quasi-static assembly of compliantly supported rigid parts[J]. Journal of Dynamic Systems Measurement and Control, 1982, 104 (2): 65- 77
[14]
费燕琼, 赵锡芳 基于凸多面体边界元的接触状态判断[J]. 机械工程学报, 2005, 41 (1): 50- 53 FEI Yan-qiong, ZHAO Xi-fang Judging assembly contact states based on boundary components of convex polyhedron[J]. Chinese Journal of Mechanical Engineering, 2005, 41 (1): 50- 53
doi: 10.3321/j.issn:0577-6686.2005.01.011
[15]
STURGES R, LAOWATTANA S Design of an orthogonal compliance for polygonal peg insertion[J]. Journal of Mechanical Design, 1996, 118 (3): 106- 114
[16]
HOGAN N Impedance control: an approach to manipulation: Part I-Theory[J]. Journal of Dynamic Systems Measurement and Control, 1985, 107: 1- 24
doi: 10.1115/1.3140702
[17]
SINGH H P, SUKAVANAM N Stability analysis of robust adaptive hybrid position/force controller for robot manipulators using neural network with uncertainties[J]. Neural Computing and Applications, 2012, 22 (8): 1745- 1755
doi: 10.1007%2Fs00521-012-0966-6
[18]
WHITNEY D E, ROURKE J Mechanical behavior and design equations for elastomer shear pad remote center compliances[J]. Journal of Dynamic Systems, Measurement, and Control, 1986, 108 (3): 223- 232
doi: 10.1115/1.3143771
[19]
CUTKOSKY M, WRIGHT P Active control of a compliant wrist in manufacturing tasks[J]. Journal of Manufacturing Science and Engineering, 1986, 108 (1): 36- 43
[20]
龚正. 面向热室的聚变堆内部器件清洗去污遥操作装置关键技术研究[D]. 合肥: 中国科学技术大学, 2016. GONG Zheng. Research on key technologies of cleaning decontaminationremote handling equipment for fusion reactor in-vesselcomponents in hot cell[D]. Hefei: University of Science and Technology of China, 2016.