|
|
|
| Safety evaluation of bionic-muscle cable-driven lower limb rehabilitation robot system |
Yan-lin WANG1,2( ),Ke-yi WANG1,*(),Kui-cheng WANG1,Zong-jun MO1,Lu-ying WANG1 ),Ke-yi WANG1,*(),Kui-cheng WANG1,Zong-jun MO1,Lu-ying WANG1 |
1. College of Mechanical and Electrical Engineering, Harbin Engineering University, Harbin 150001, China
2. School of Mechanical and Electrical Engineering, Lanzhou University of Technology, Lanzhou 730050, China |
|
|
|
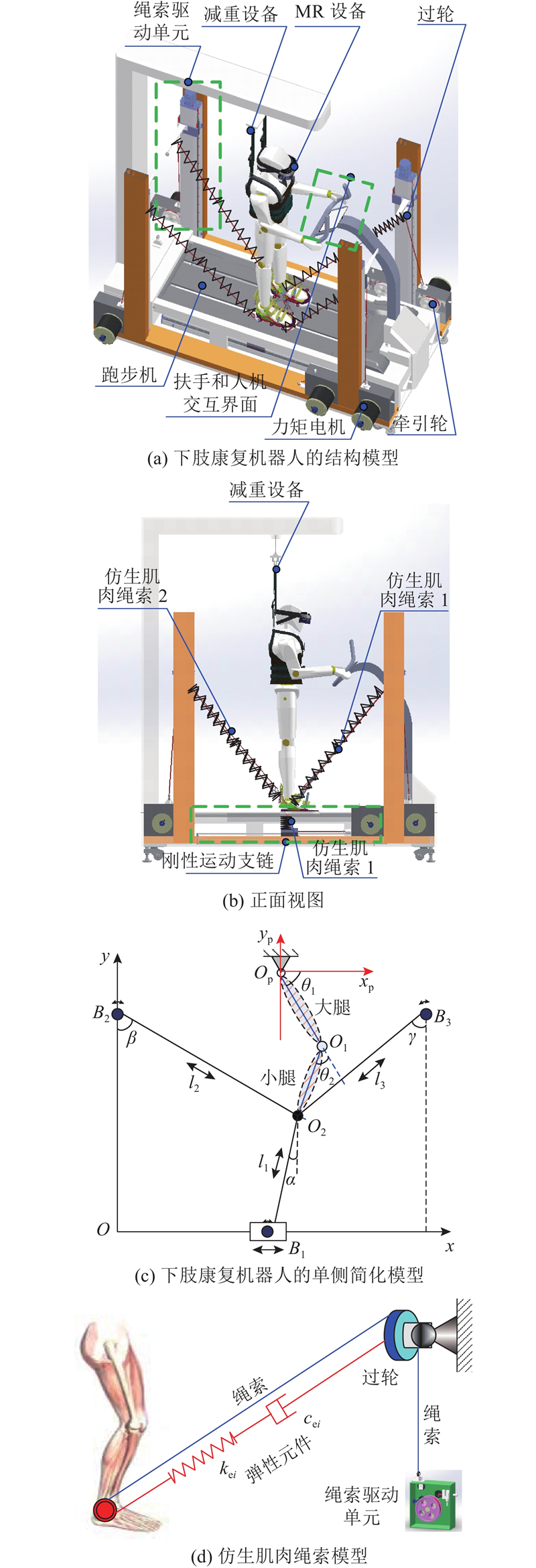
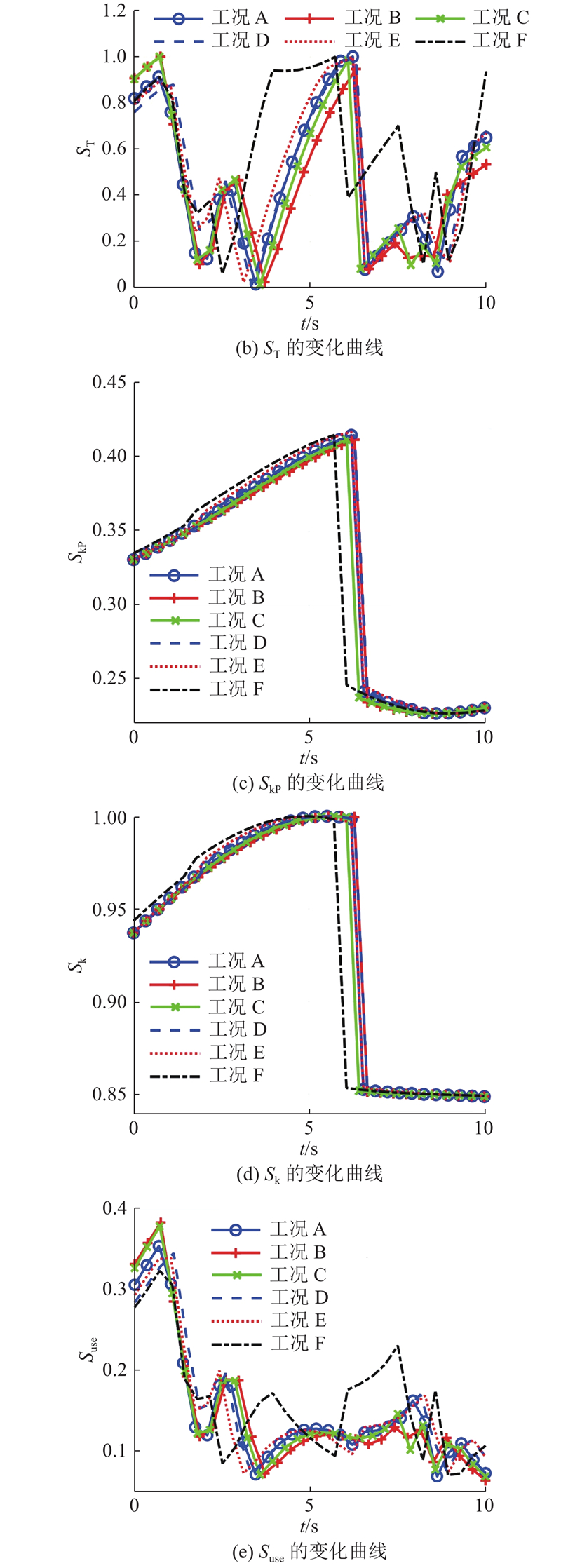
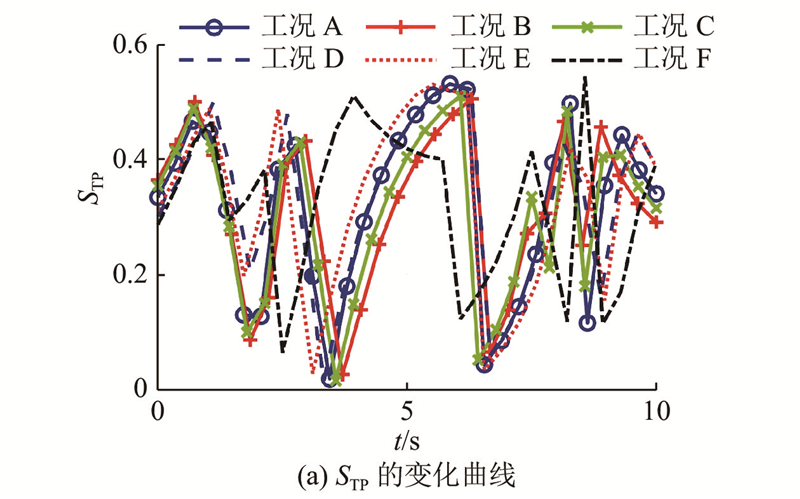
Abstract A bionic muscle cable model was given based on the Hill muscle model, and a bionic-muscle cable-driven lower limb rehabilitation robot (BM-CDLR) was introduced in order to analyze the safety evaluation method and index of BM-CDLR. The safety performance factors were defined based on the motion planning of the rigid motion branch and mechanical analysis of the BM-CDLR. The use safety evaluation index of the BM-CDLR was proposed by considering the motion tolerance of different patients and the volatility of the motion speed of the slider in the rigid motion branch chain. The rationality of the use safety evaluation method of the BM-CDLR was verified through case analysis.
|
|
Received: 05 March 2021
Published: 05 January 2022
|
|
|
| Fund: 国家自然科学基金资助项目(52175006); 黑龙江省自然科学基金资助项目(LH2019E032); 中央高校基本科研业务费专项资金资助项目(3072020CF0706) |
|
Corresponding Authors:
Ke-yi WANG
E-mail: wangyanlin0513@21cn.com;wangkeyi@hrbeu.edu.cn
|
仿肌肉绳索驱动下肢康复机器人系统使用安全性评价
为了研究仿生肌肉绳索驱动下肢康复机器人使用安全性的评价方法和指标,基于Hill肌肉模型,给出仿生肌肉绳索模型,介绍仿生肌肉绳索驱动下肢康复机器人(BM?CDLR). 在康复机器人的刚性运动支链的运动规划和力学分析的基础上,定义了安全性能因子. 考虑不同患者的运动承受能力和刚性运动支链滑块运动速度的波动性,提出康复机器人的使用安全性评价指标. 通过实例分析验证了使用安全性评价方法的合理性.
关键词:
仿生肌肉绳索,
下肢康复机器人,
运动规划,
安全性能因子,
使用安全性
|
|
| [1] |
United Nations. 2019 revision of world population prospects [R]. New York: Department of Economic and Social Affairs, United Nations, 2019.
|
|
|
| [2] |
WANG Y L, WANG K Y, ZHAO W Y, et al Effects of single crouch walking gaits on fatigue damages of lower extremity main muscles[J]. Journal of Mechanics in Medicine and Biology, 2019, 19 (6): 1940046
|
|
|
| [3] |
DE-LA-TORRE R, OÑA E D, BALAGUER C, et al Robot-aided systems for improving the assessment of upper limb spasticity: a systematic review[J]. Sensors, 2020, 20 (18): 5251
doi: 10.3390/s20185251
|
|
|
| [4] |
BASTERIS A, NIJENHUIS S M, STIENEN A H A Training modalities in robot-mediated upper limb rehabilitation in stroke: a framework for classification based on a systematic review[J]. Journal of Neuroengineering and Rehabilitation, 2014, 11: 111- 126
doi: 10.1186/1743-0003-11-111
|
|
|
| [5] |
WANG Y L, WANG K Y, ZHANG Z X, et al Design, comprehensive evaluation, and experimental study of a cable-driven parallel robot for lower limb rehabilitation[J]. Journal of the Brazilian Society of Mechanical Sciences and Engineering, 2020, 42 (7): 371
doi: 10.1007/s40430-020-02443-x
|
|
|
| [6] |
WANG Y L, WANG K Y, WANG W L, et al Appraise and analysis of dynamical stability of cable-driven lower limb rehabilitation training robot[J]. Journal of Mechanical Science and Technology, 2019, 33 (11): 5461- 5472
doi: 10.1007/s12206-019-1040-4
|
|
|
| [7] |
CUI X, CHEN W H, JIN X, et al Design of a 7-DOF cable-driven arm exoskeleton (CAREX-7) and a controller for dexterous motion training or assistance[J]. IEEE/ASME Transactions on Mechatronics, 2017, 22 (1): 161- 172
doi: 10.1109/TMECH.2016.2618888
|
|
|
| [8] |
ALIMAN N, RAMLI R, HARIS S M Design and development of lower limb exoskeleton: a survey[J]. Robotics and Autonomous Systems, 2017, 95: 102- 116
doi: 10.1016/j.robot.2017.05.013
|
|
|
| [9] |
AMIRI M S, RAMLI R, TARMIZI M A A, et al Simulation and control of a six degree of freedom lower limb exoskeleton[J]. Journal Kejuruteraan, 2020, 32 (2): 197- 204
|
|
|
| [10] |
ARMANNSDOTTIR A L, BECKERLE P, MORENO J C, et al Assessing the involvement of users during development of lower limb wearable robotic exoskeletons: a survey study[J]. Human Factors, 2020, 62 (3): 351- 364
doi: 10.1177/0018720819883500
|
|
|
| [11] |
KINO H, YOSHITAKE T, WADA R, et al 3-DOF planar parallel-wire driven robot with an active balancer and its model-based adaptive control[J]. Advanced Robotics, 2018, 32 (14): 766- 777
doi: 10.1080/01691864.2018.1493397
|
|
|
| [12] |
QIAN S, ZI B, WANG W, et al A review on cable-driven parallel robots[J]. Chinese Journal of Mechanical Engineering, 2018, 31 (1): 66- 77
doi: 10.1186/s10033-018-0267-9
|
|
|
| [13] |
ZOU Y P, WANG N, WANG X Q, et al Design and experimental research of movable cable-driven lower limb rehabilitation robot[J]. IEEE Access, 2019, 7: 2315- 2326
doi: 10.1109/ACCESS.2018.2887233
|
|
|
| [14] |
ZOU Y. P, LIU K, WANG N, et al. Design and optimization of movable cable-driven lower-limb rehabilitation robot [C]// 3rd International Conference on Advanced Robotics and Mechatronics. Singapore: IEEE, 2018: 714-719.
|
|
|
| [15] |
ZI B, YIN G C, LI Y, et al. Kinematic performance analysis of a hybrid-driven waist rehabilitation robot [C]// 2nd International Conference on Mechatronics and Robotics Engineering. Nice: Springer, 2016.
|
|
|
| [16] |
SCALERA L, GALLINA P, SERIANI S, et al Cable-based robotic crane (CBRC): design and implementation of overhead traveling cranes based on variable radius drums[J]. IEEE Transactions on Robotics, 2018, 34 (2): 474- 485
doi: 10.1109/TRO.2018.2791593
|
|
|
| [17] |
SERIANI S, GALLINA P Variable radius drum mechanisms[J]. Journal of Mechanisms and Robotics-Transactions of the ASME, 2016, 8 (2): 021016
doi: 10.1115/1.4031951
|
|
|
| [18] |
WANG Y L, WANG K Y, ZHANG Z X, et al Analysis of dynamical stability of rigid-flexible hybrid-driven lower limb rehabilitation robot[J]. Journal of Mechanical Science and Technology, 2020, 34 (4): 1735- 1748
doi: 10.1007/s12206-020-0335-9
|
|
|
| [19] |
WANG K Y, YIN P C, YANG H P, et al. The man-machine motion planning of rigid-flexible hybrid lower limb rehabilitation robot [J]. Advances in Mechanical Engineering, 2018, 10(6): 1687814018775865.
|
|
|
| [20] |
WANG Y L, WANG K Y, ZHANG Z X, et al Appraisement and analysis of dynamical stability of under-constrained cable-driven lower limb rehabilitation training robot[J]. Robotica, 2020, 39 (6): 1023- 1036
|
|
|
| [21] |
王砚麟, 赵志刚, 苏程, 等 欠约束多机协调吊运系统工作空间和运动稳定性分析[J]. 振动与冲击, 2017, 36 (16): 44- 50
WANG Yan-lin, ZHAO Zhi-gang, SU Cheng, et al Analysis of the workspace and dynamic stability of a multi-robot collaboratively towing system[J]. Journal of Vibration and Shock, 2017, 36 (16): 44- 50
|
|
|
| [22] |
赵志刚, 王砚麟, 李劲松 多机器人协调吊运系统力位姿混合运动稳定性评价方法[J]. 哈尔滨工程大学学报, 2018, 39 (1): 148- 155
ZHAO Zhi-gang, WANG Yan-lin, LI Jin-song Appraise of dynamical stability of multi-robots cooperatively lifting system based on hybrid force-position-pose approach[J]. Journal of Harbin Engineering University, 2018, 39 (1): 148- 155
|
|
|
| [23] |
ZHAO T, ZI B, QIAN S, et al Algebraic method-based point-to-point trajectory planning of an under-constrained cable-suspended parallel robot with variable angle and height cable mast[J]. Chinese Journal of Mechanical Engineering, 2020, 33 (1): 54
doi: 10.1186/s10033-020-00473-z
|
|
|
| [24] |
韦慧玲, 仇原鹰, 盛英 高速绳牵引摄像机器人的运动稳定控制[J]. 西安电子科技大学学报, 2016, 43 (5): 63- 69
WEI Hui-ling, QIU Yuan-ying, SHENG Ying Motion stable control for cable-driven parallel camera robots with high speeds[J]. Journal of Xidian University, 2016, 43 (5): 63- 69
doi: 10.3969/j.issn.1001-2400.2016.05.012
|
|
|
| [25] |
WANG Y L, WANG K Y, ZHANG Z X, et al Control strategy and experimental research of a cable-driven lower limb rehabilitation robot[J]. Proceedings of the Institution of Mechanical Engineers Part C-Journal of Mechanical Engineering Science, 2020, 235 (13): 2468- 2481
|
|
|
| [26] |
CHEN Q, ZI B, SUN Z, et al Design and development of a new cable-driven parallel robot for waist rehabilitation[J]. IEEE/ASME Transactions on Mechatronics, 2019, 24 (4): 1497- 1507
doi: 10.1109/TMECH.2019.2917294
|
|
|
| [27] |
PLOOIJ M, KELLER U, STERKE B, et al Design of RYSEN: an intrinsically safe and low-power three-dimensional overground body weight support[J]. IEEE Robotics and Automation Letters, 2018, 3 (3): 2253- 2260
doi: 10.1109/LRA.2018.2812913
|
|
|
| [28] |
吴博松. 基于仿肌肉柔索驱动的下肢康复机器人研究[D]. 哈尔滨: 哈尔滨工程大学, 2017.
WU Bo-song. Research on lower limb rehabilitation robot based on imitating muscle wire-drive [D]. Harbin: Harbin Engineering University, 2017.
|
|
|
| [29] |
DUAN Q J, VASHISTA V, AGRAWAL S K Effect on wrench-feasible workspace of cable-driven parallel robots by adding springs[J]. Mechanism and Machine Theory, 2015, 86: 201- 210
doi: 10.1016/j.mechmachtheory.2014.12.009
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|